<think>嗯,用户这次问的是Halcon中fit_rectangle2_contour_xld算子的功能和使用方法。从用户提供的参考引用来看,ta应该是在做机器视觉相关的开发,而且对Halcon的轮廓处理算子比较熟悉。用户之前可能接触过类似的直线拟合算子,现在想深入了解矩形拟合的具体实现。
用户可能正在处理工业检测项目,比如需要定位矩形物体或者测量矩形尺寸。ta提供的参考链接里提到了矩形矢量拟合和直线拟合的实现原理,说明用户对底层算法也有一定兴趣。不过这次的问题更聚焦在算子使用层面,所以重点应该放在接口说明和实际案例上。
这个算子确实挺实用的,它通过轮廓点来拟合矩形,比直接找四个角点更稳定。核心是采用最小二乘优化,能处理部分遮挡或噪声的情况。用户可能最关心的是参数设置技巧,比如ClippingFactor怎么调才能平衡噪声抑制和拟合精度。
考虑到用户可能是工程师,示例代码应该保持工业级严谨性。用金属零件检测的场景很典型,可以展示完整的ROI提取到结果可视化的流程。特别要注意说明angle_extent和angle_step这两个关键参数,很多新手会在这里踩坑。
啊,差点忘了系统要求生成相关问题。用户既然在研究这个算子,后续可能会遇到:如何评估拟合质量?复杂背景怎么处理?和边缘检测算子如何配合?这些都应该作为延伸问题列出来。</think>Halcon 中的 `fit_rectangle2_contour_xld` 算子用于**从一组轮廓点(XLD 轮廓)中拟合一个矩形**。它找到最能代表输入轮廓点的矩形(位置、大小、方向),并输出该矩形的参数。该算子基于鲁棒拟合算法(如 Tukey 权重函数),能有效抵抗轮廓中的离群点(噪声点)干扰。
**核心功能:**
1. **输入:** 一个 XLD 轮廓(`Contour`)。
2. **拟合:** 使用指定的鲁棒算法(如 'regression', 'huber', 'tukey', 'drop', 'gauss')将矩形模型拟合到轮廓点上。
3. **输出:** 拟合得到的矩形参数:
* `Row`, `Column`: 矩形中心点坐标。
* `Phi`: 矩形长边的方向(弧度),范围 [-π/2, π/2]。
* `Length1`, `Length2`: 矩形的半边长(一半长度,一半宽度)。通常 `Length1` >= `Length2`,且 `Phi` 是 `Length1` 边的方向。
* 拟合质量参数(如 `PointError`)。
**关键特点:**
* **鲁棒性:** 对轮廓中的噪声点(离群点)有较强的抵抗力,这是其优于普通最小二乘拟合的关键。
* **矩形模型:** 严格拟合一个矩形几何形状,输出其精确的位置、大小和方向。
* **算法选择:** 提供多种鲁棒估计算法,适应不同噪声分布的场景。
* **XLD 轮廓处理:** 专为处理 Halcon 的亚像素轮廓(XLD)设计。
**参数说明:**
* `Contour` (输入): 待拟合的输入 XLD 轮廓。
* `Algorithm` (输入): 鲁棒估计算法名称。常用选项:
* 'regression': 标准最小二乘(对噪声敏感)
* 'huber': Huber 权重函数
* 'tukey': Tukey 权重函数(常用,效果较好)[^1][^2]
* 'drop': 丢弃最大偏差点
* 'gauss': 类似 Tukey
* `MaxNumPoints` (输入): 用于拟合的最大轮廓点数。0 表示使用所有点。限制点数可加速计算。
* `ClippingEndPoints` (输入): 轮廓两端要忽略的点数或比例。0 表示不忽略。用于排除轮廓端点可能的干扰。
* `Iterations` (输入): 最大迭代次数。鲁棒拟合通常需要多次迭代收敛。
* `ClippingFactor` (输入): 算法特定的阈值参数(如 Tukey 中的 `c`),控制哪些点被视为离群点。值越大,越少点被降权或丢弃,对噪声更敏感;值越小,对噪声抑制更强,但也可能过度抑制有效点。
* `Row`, `Column` (输出): 拟合矩形的中心坐标。
* `Phi` (输出): 矩形长边 (`Length1`) 的方向角(弧度),范围 [-π/2, π/2]。
* `Length1`, `Length2` (输出): 矩形的半边长(一半长度,一半宽度)。`Length1` 是 `Phi` 方向上的半边。
* `PointError` (输出): 所有轮廓点到拟合矩形四条边距离的均方根误差(RMS),衡量拟合质量。
**使用示例:**
```python
* 假设已有一个包含矩形边缘的XLD轮廓 Contour
* 使用Tukey算法进行鲁棒拟合,最大点数不限,忽略两端5%的点,最大迭代10次,Tukey阈值因子设为2.5
fit_rectangle2_contour_xld(Contour, 'tukey', -1, 0.05, 10, 2.5, Row, Column, Phi, Length1, Length2, PointError)
* 输出拟合结果
disp_message(WindowHandle, '中心: (' + Row$'.2f' + ', ' + Column$'.2f' + ')', 'window', 12, 12, 'black', 'true')
disp_message(WindowHandle, '方向: ' + deg(Phi)$'5.2f' + ' deg', 'window', 42, 12, 'black', 'true')
disp_message(WindowHandle, '半长(L1): ' + Length1$'.2f', 'window', 72, 12, 'black', 'true')
disp_message(WindowHandle, '半宽(L2): ' + Length2$'.2f', 'window', 102, 12, 'black', 'true')
disp_message(WindowHandle, '误差: ' + PointError$'.4f', 'window', 132, 12, 'black', 'true')
* 根据拟合参数生成矩形轮廓并显示
gen_rectangle2_contour_xld(Rectangle, Row, Column, Phi, Length1, Length2)
dev_display(Contour)
dev_display(Rectangle)
```
**示例说明:**
1. **输入:** `Contour` 是包含矩形边缘信息的亚像素轮廓。
2. **拟合:** 使用 `'tukey'` 算法进行拟合。`MaxNumPoints=-1` 表示使用所有轮廓点。`ClippingEndPoints=0.05` 表示忽略轮廓起点和终点各占总点数 5% 的点(例如,100 个点则忽略首尾各 5 个点)。`Iterations=10` 设置最大迭代次数为 10。`ClippingFactor=2.5` 是 Tukey 算法的关键参数。
3. **输出:** 获取拟合矩形的中心坐标 (`Row`, `Column`)、方向角 (`Phi`)、半长 (`Length1`)、半宽 (`Length2`) 以及拟合误差 (`PointError`)。
4. **显示:**
* 在图像窗口 (`WindowHandle`) 上打印出拟合得到的矩形参数。
* 使用 `gen_rectangle2_contour_xld` 根据拟合参数生成一个表示矩形的 XLD 轮廓 (`Rectangle`)。
* 使用 `dev_display` 显示原始轮廓 (`Contour`) 和拟合得到的矩形轮廓 (`Rectangle`)。
**典型应用场景:**
* **工业检测:** 精确定位和测量电路板、芯片、金属零件、包装盒等矩形物体。
* **机器人引导:** 计算矩形工件的精确位置和方向,用于抓取或装配。
* **OCR/条码识别:** 定位文档或证件上的矩形区域(如文本框、照片框、条码区)。
* **尺寸测量:** 测量矩形物体的长、宽、角度等几何参数。
* **目标跟踪:** 跟踪场景中移动的矩形物体。
**注意事项:**
* **轮廓质量:** 输入轮廓的质量直接影响拟合结果。使用 `edges_sub_pix`, `threshold_sub_pix` 等算子获取清晰、连续的矩形边缘轮廓是关键第一步。
* **参数调整:** `Algorithm` 和 `ClippingFactor` 对结果影响很大。`'tukey'` 通常是较好的起点。`ClippingFactor` 需要根据实际轮廓噪声水平调整:噪声大则值调小(如 1.5-2.0),噪声小或边缘清晰则值调大(如 3.0-5.0)。`ClippingEndPoints` 有助于排除轮廓首尾可能的不完整点。
* **迭代次数:** `Iterations` 需足够大以保证算法收敛,但过大会增加计算时间。通常 5-20 次足够。
* **拟合质量检查:** 务必检查输出的 `PointError` 以及可视化叠加的拟合矩形 (`Rectangle`),确保拟合结果符合预期。误差过大或矩形明显偏离轮廓表明拟合失败,需检查轮廓或调整参数。
* **矩形方向:** `Phi` 的范围是 [-π/2, π/2],表示的是长边 (`Length1`) 的方向。`Length1` 总是大于等于 `Length2`。
[^1]: Halcon学习拓展系列—矩形矢量直线拟合卡尺算子fit_line_rectangle_vector。其中,get_rectangle_median_line_base_phi算子请参考《halcon学习拓展系列—计算Phi方向的矩形中分线算子get_rectangle_median_line_base_phi》。
[^2]: 76-OpenCVSharp 创建实现Halcon的fit_line_contour_xld 算子(用于轮廓上拟合直线)。数学原理保证: Tukey权重函数数学表达式: $ w(r) = \begin{cases} (1 - (r/c)^2)^2 & \text{当 } |r| \leq c \\ 0 & \text{其他情况} \end{cases} $。








 超级会员免费看
超级会员免费看
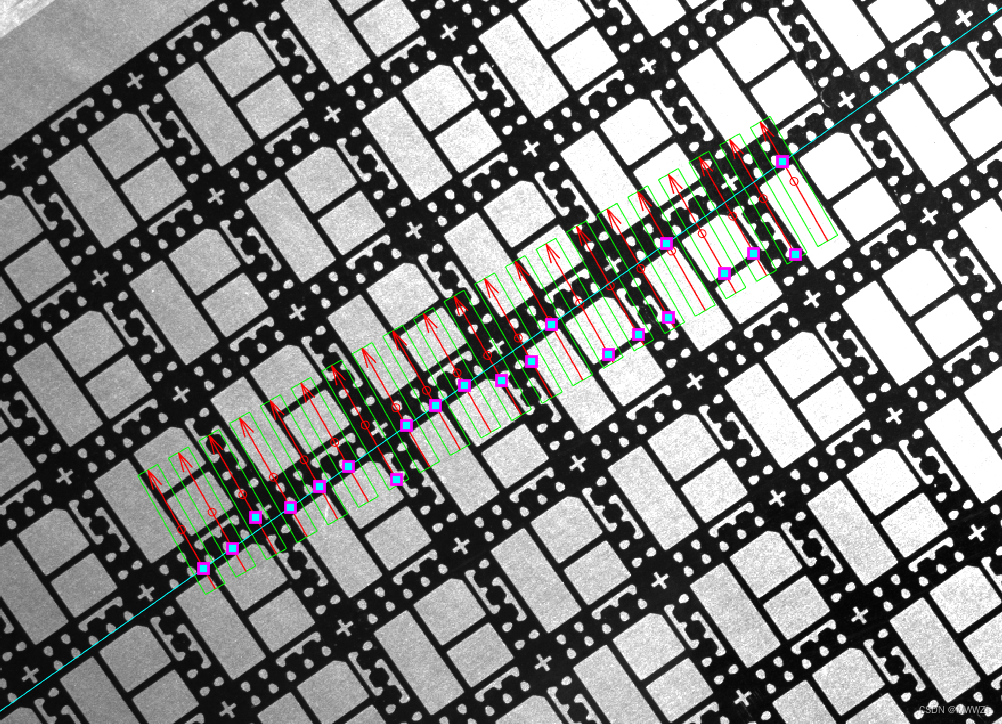
 本文介绍了如何在Halcon中使用fit_line_contour_xld函数来实现直线拟合,特别是在卡尺测量应用中的具体步骤。通过创建多个卡尺,选择边缘点,并结合霍夫变换、最小二乘法等方法,有效地剔除异常点干扰,确保直线拟合的准确性。同时,探讨了fit_line_contour_xld的加权最小二乘法及权重函数,并展示了拟合效果。
本文介绍了如何在Halcon中使用fit_line_contour_xld函数来实现直线拟合,特别是在卡尺测量应用中的具体步骤。通过创建多个卡尺,选择边缘点,并结合霍夫变换、最小二乘法等方法,有效地剔除异常点干扰,确保直线拟合的准确性。同时,探讨了fit_line_contour_xld的加权最小二乘法及权重函数,并展示了拟合效果。

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









