







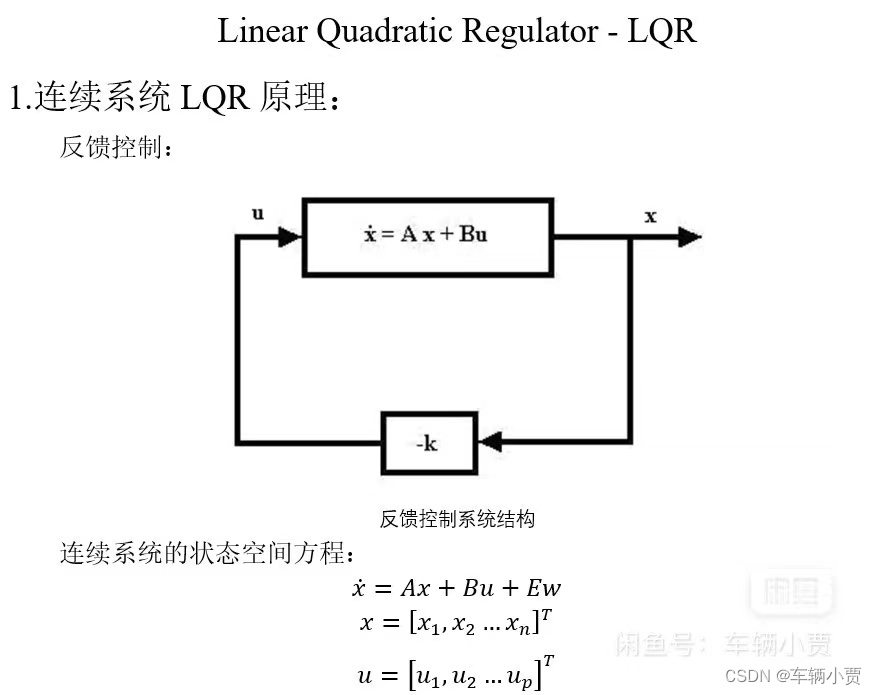
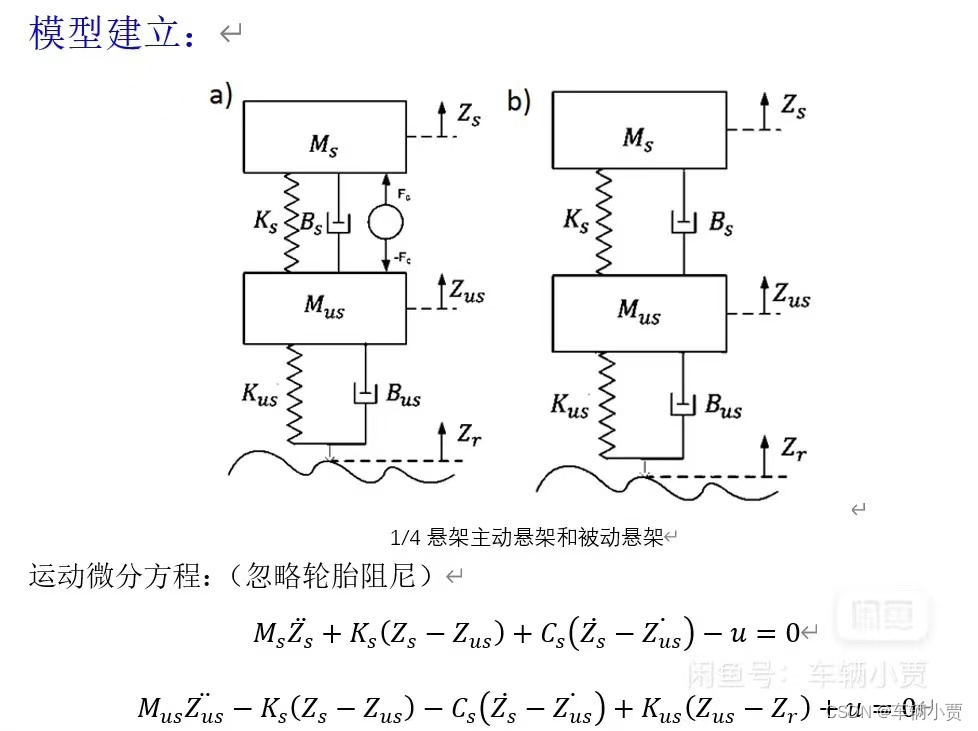
LQR控制主动悬架模型
LQR控制通过求解二次型代价函数最小化问题,求解反馈系数K使得在无限时域内代价函数达到最低,LQR控制的基本形式为状态反馈控制,计算速度快同时鲁棒性强,效果好。
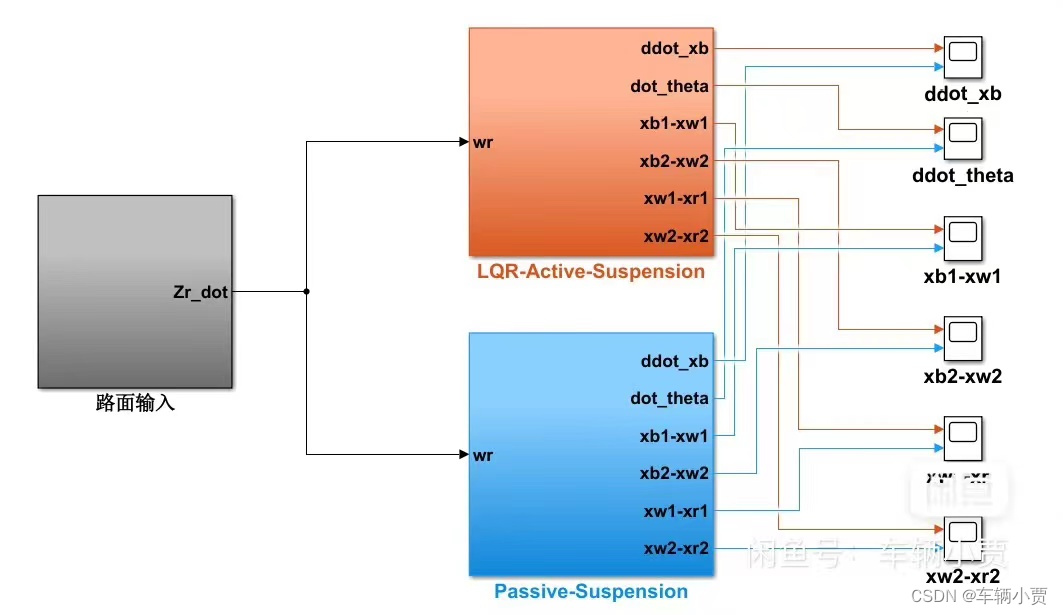
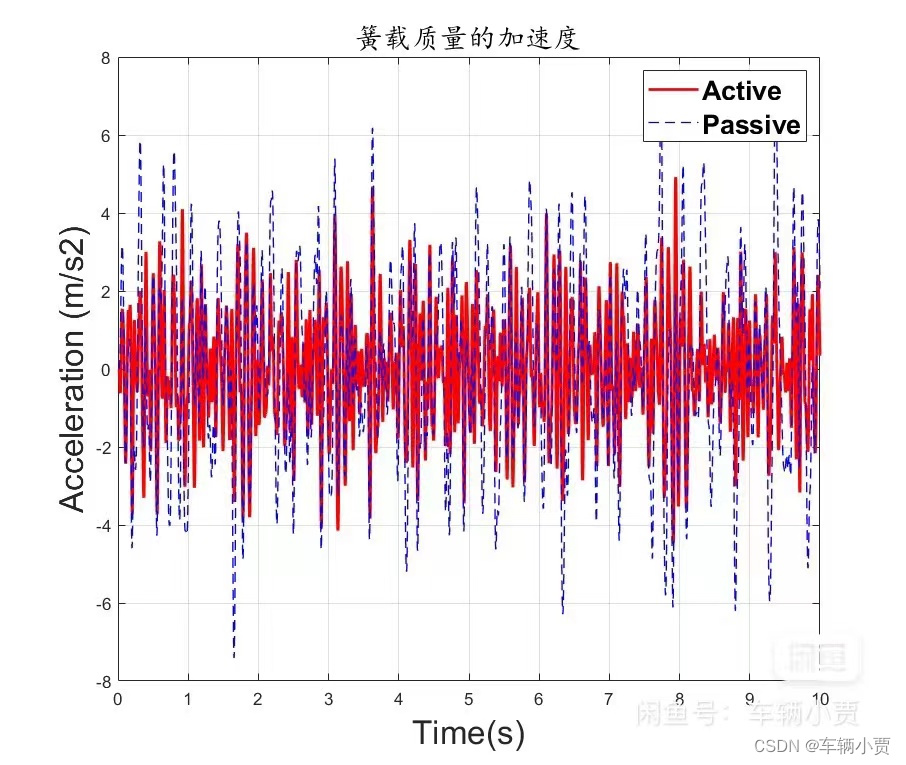
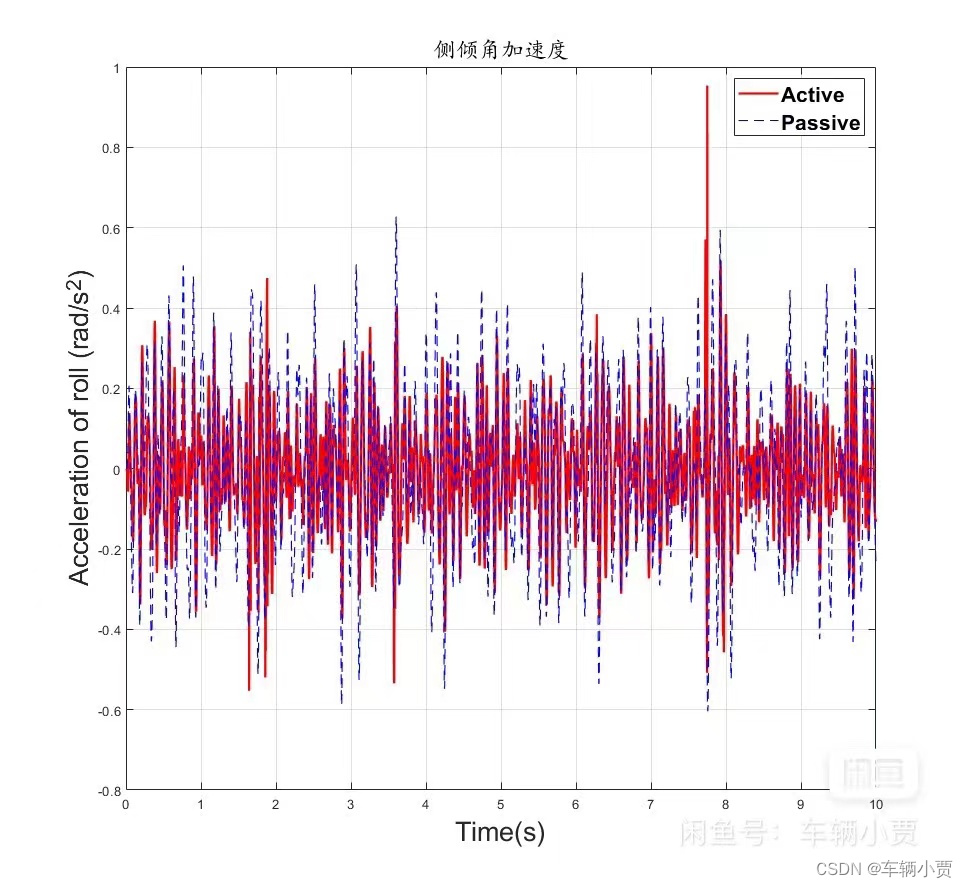
simulink模型对比了主/被动悬架的系统响应结果,如簧载质量加速度、悬架动挠度和俯仰角速度等。模型中有多个路面可供选择随机路面(A-H)、减速带等。matlab代码中包括画图代码,可以将悬架性能指标绘制出来。
LQR主动悬架有2自由度(1/4)主动悬架50,4自由度(半车)主动悬架100和7自由度(整车)主动悬架150,2自由度(1/4)LQG主动悬架80(使用卡尔曼滤波观测状态变量)
资料中有matlab代码,simulink模和介绍资料(自制),包括详细的建模过程以及算法原理。所有模型和文档均为本人制作,有同学需要可以来xianyu联系我,名字与优快云同名,可以提供基本的答疑。有人在优快云盗卖我的模型,价格更贵并且他无法提供任何答疑,请大家谨慎购买。


















 1369
1369

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









