








定义
如果目标函数或约束条件中包含非线性函数,就称这种规划问题为非
线性规划问题。可概括为一般形式
m
i
n
f
(
x
)
s
.
t
.
h
j
(
x
)
≤
0
,
j
=
1
,
⋯
,
q
g
i
(
x
)
=
0
,
i
=
1
,
⋯
,
p
\begin{array}{l} \hspace*{1.5cm}min{\rm{ }}f{\rm{ }}\left( x \right){\rm{ }}\\ s.t.\hspace*{1cm}{\rm{ }}{h_j}\left( x \right){\rm{ }} \le {\rm{ }}0,{\rm{ }}j{\rm{ }} = {\rm{ }}1, \cdots ,{\rm{ }}q\\ \hspace*{1.5cm}{g_i}\left( x \right){\rm{ }} = {\rm{ }}0,{\rm{ }}i{\rm{ }} = {\rm{ }}1, \cdots ,{\rm{ }}p{\rm{ }} \end{array}
minf(x)s.t.hj(x)≤0,j=1,⋯,qgi(x)=0,i=1,⋯,p
其中
x
=
[
x
1
⋯
x
n
]
T
x=[x_1 \cdots x_n ]^T
x=[x1⋯xn]T称为模型(NP)的决策变量,f 称为目标函数,
g
i
(
i
=
1
,
⋯
,
p
)
g_i (i = 1,\cdots, p)
gi(i=1,⋯,p)和
h
j
(
j
=
1
,
⋯
,
q
)
h _j(j = 1,\cdots, q)
hj(j=1,⋯,q)称为约束函数。另外,
g
i
(
x
)
=
0
(
i
=
1
,
⋯
,
p
)
g_i(x) = 0 (i = 1,\cdots, p)
gi(x)=0(i=1,⋯,p) 称为等式约束,
h
j
(
x
)
≤
0
(
j
=
1
,
⋯
,
q
)
h_j(x) ≤ 0 ( j = 1,\cdots,q)
hj(x)≤0(j=1,⋯,q) 称为不等式的约束。
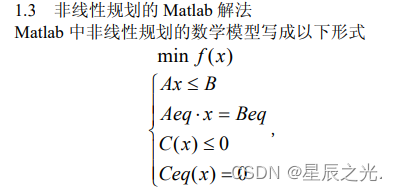
其中 f (x)是标量函数, A, B, Aeq, Beq是相应维数的矩阵和向量,C(x),Ceq(x) 是非线性向量函数。
matlab命令:
X=FMINCON(FUN,X0,A,B,Aeq,Beq,LB,UB,NONLCON,OPTIONS)
x = fmincon(fun,x0,A,b) 从 x0 开始,尝试在满足线性不等式 A*x ≤ b 的情况下寻找 fun 中所述的函数的最小值点 x。x0 可以是标量、向量或矩阵。
x = fmincon(fun,x0,A,b,Aeq,beq) 在满足线性等式 Aeq*x = beq 以及不等式 A*x ≤ b 的情况下最小化 fun。如果不存在不等式,则设置 A = [] 和 b = []。
x = fmincon(fun,x0,A,b,Aeq,beq,lb,ub) 对 x 中的设计变量定义一组下界和上界,使解始终在 lb ≤ x ≤ ub 范围内。如果不存在等式,请设置 Aeq = [] 和 beq = []。如果 x(i) 无下界,请设置 lb(i) = -Inf,如果 x(i) 无上界,请设置 ub(i) = Inf。
x = fmincon(fun,x0,A,b,Aeq,beq,lb,ub,nonlcon,options) 使用 options 所指定的优化选项执行最小化。使用 optimoptions 可设置这些选项。如果没有非线性不等式或等式约束,请设置 nonlcon = []。
返回值是向量 x x x ,其中 FUN 是用 M 文件定义的函数 f (x);X0 是 x 的初始值;A,B,Aeq,Beq 定义了线性约束 A* X ≤ B, Aeq * X = Beq ,如果没有线性约束,则A=[],B=[],Aeq=[],Beq=[];LB 和 UB 是变量 x 的下界和上界,如果上界和下界没有约束,则 LB=[],UB=[],如果 x 无下界,则 LB 的各分量都为-inf,如果 x 无上界,则 UB的各分量都为 inf;NONLCON 是用 M 文件定义的非线性向量函数C(x),Ceq(x) ;OPTIONS定义了优化参数,可以使用 Matlab 缺省的参数设置。
实例
min f ( x ) = x 1 2 + x 2 2 + x 3 2 + 8 s . t . x 1 2 − x 2 + x 3 2 ⩾ 0 x 1 + x 2 2 + x 3 3 ⩽ 20 − x 1 − x 2 2 + 2 = 0 x 2 + 2 x 3 2 = 3 x 1 , x 2 , x 3 ⩾ 0 \begin{aligned} & \min {\kern 1pt} {\kern 1pt} f\left( x \right) = x_1^2 + x_2^2 + x_3^2 + 8 \\ s.t. \hspace*{1cm}& x_1^2 - {x_2} + x_3^2 \geqslant 0 \\ &{x_1} + x_2^2 + x_3^3 \leqslant 20 \\ & {-x_1} - x_2^2 + 2 = 0 \\ &{x_2} + 2x_3^2 = 3 \\ & {x_1},{x_2},{x_3} \geqslant 0 \\ \end{aligned} s.t.minf(x)=x12+x22+x32+8x12−x2+x32⩾0x1+x22+x33⩽20−x1−x22+2=0x2+2x32=3x1,x2,x3⩾0
%fun1目标函数
function f=fun1(x);
f=sum(x.^2)+8
%fun2约束函数
function [g,h]=fun2(x);
g=[-x(1)^2+x(2)-x(3)^2 x(1)+x(2)^2+x(3)^3-20]; %非线性不等式约束
h=[-x(1)-x(2)^2+2 x(2)+2*x(3)^2-3]; %非线性等式约束
%main主函数
options=optimset('largescale','off');
[x,y]=fmincon('fun1',rand(3,1),[],[],[],[],zeros(3,1),[], ...
'fun2', options)
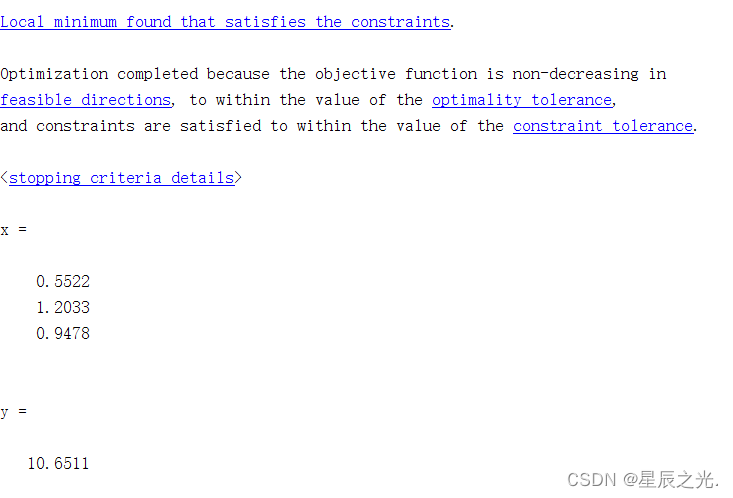
运行结果:

或者可以下面的方法:
clc
clear all
%% 主函数
options=optimset('largescale','off');
[x,y] = fmincon(@fun,rand(3,1),[],[],[],[],zeros(3,1),[], @nonlcon, options)
%% 目标函数
function f=fun(x)
f=sum(x.^2)+8;
end
%% 非线性约束条件
function [c,ceq]=nonlcon(x)
c=[-x(1)^2+x(2)-x(3)^2
x(1)+x(2)^2+x(3)^3-20]; %非线性不等式约束
ceq=[-x(1)-x(2)^2+2
x(2)+2*x(3)^2-3]; %非线性等式约束
end
结果同上.
这样就可以解出当 x1 = 0.5522, x2 =1.2033, x3 = 0.9478 时,最小值 y =10.6511。
线性不等式约束
目标函数:
fun = (x)100*(x(2)-x(1)^2)^2+(1-x(1))^2
约束条件:从点[-1,2]为起点求最小值,约束方程
x
(
1
)
+
2
x
(
2
)
⩽
1
x(1)+2x(2) \leqslant 1
x(1)+2x(2)⩽1
matlab代码:
clear
clc
fun = @(x)100*(x(2)-x(1)^2)^2 + (1-x(1))^2;%匿名函数使用
x0 = [-1,2];%起点可以更改,似乎没影响
A = [1,2];
b = 1;
[x,y] = fmincon(fun,x0,A,b)%套用函数
运行结果:
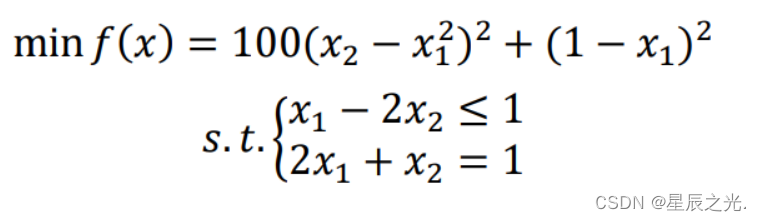
线性不等式和等式约束条件
matlab代码:
clc
clear all
fun = @(x)100*(x(2)-x(1)^2)^2 + (1-x(1))^2;
x0 = [1,1];%初始点设置自行不同
A = [1,-2];
b = 1;
Aeq = [2,1];
beq = 1;
[x,y] = fmincon(fun,x0,A,b,Aeq,beq)
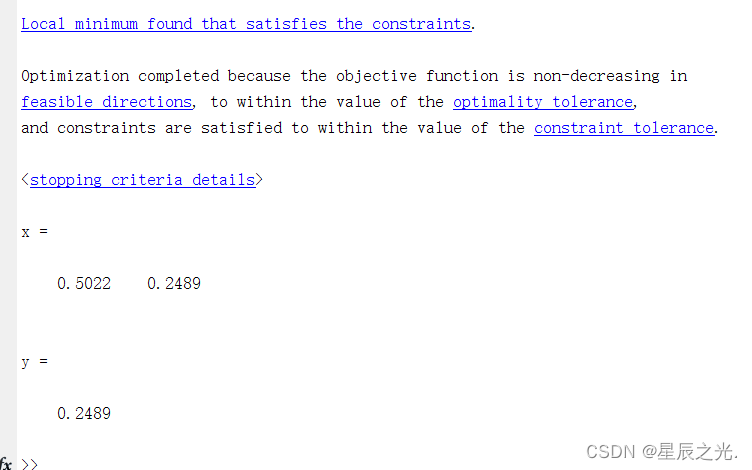
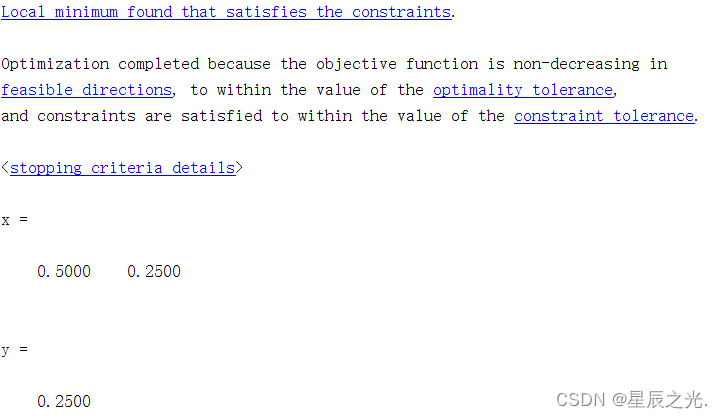
运行结果:
非线性约束
在边界约束下求目标函数在圆内最小的点:
%目标函数fun = (x)100*(x(2)-x(1)^2)^2+(1-x(1))^2
得匿名函数:
fun = @(x)100*(x(2)-x(1)^2)^2 + (1-x(1))^2;
约束条件:
0 ≤ x (1) ≤ 0.5 0
0.2≤x(2)≤0.8
可得:
lb = [0,0.2];
ub = [0.5,0.8];
同时在以[1/3, 1/3]题心、半径为1/3的圆内寻找:
function [c,ceq] = circle(x)
c = (x(1)-1/3)^2 + (x(2)-1/3)^2 - (1/3)^2;
ceq = [];
无约束条件设为[]
A = [];
b = [];
Aeq = [];
beq = [];
总代码:
函数代码:
function [c,ceq] = circle(x)
c = (x(1)-1/3)^2 + (x(2)-1/3)^2 - (1/3)^2;
ceq = [];
end
主代码:
clc
clear all
fun = @(x)100*(x(2)-x(1)^2)^2 + (1-x(1))^2;
lb = [0,0.2];
ub = [0.5,0.8];
A = [];
b = [];
Aeq = [];
beq = [];
x0 = [1/4,1/4];
nonlcon = @circle;
[x,y] = fmincon(fun,x0,A,b,Aeq,beq,lb,ub,nonlcon)
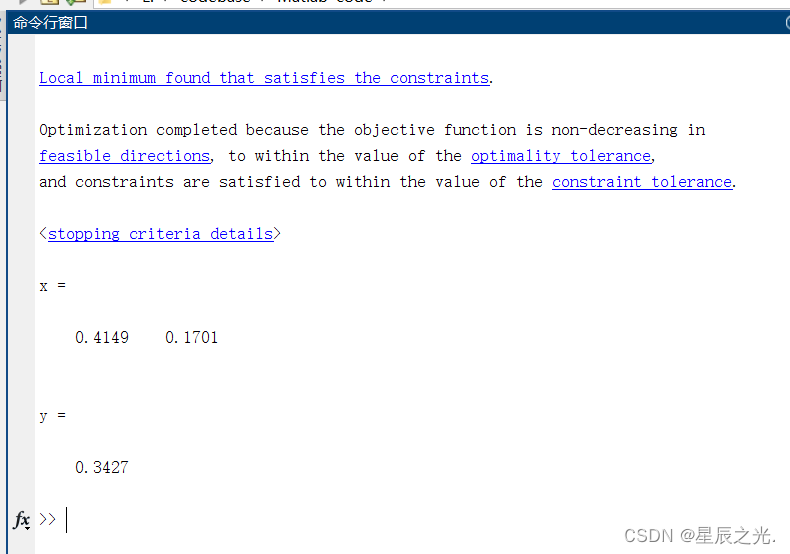
运行结果:
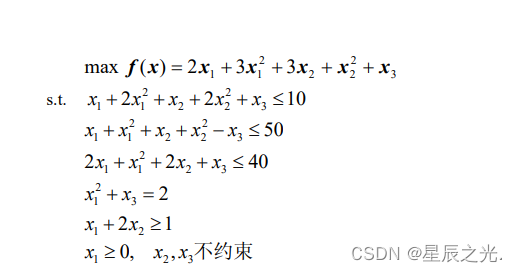
这里留几题来试试手:


















 4751
4751

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











