






 本文详细介绍了如何在Ubuntu系统中配置ROSMelodic,包括设置清华源,安装未经认证的软件,安装ROSMelodic桌面完整版,配置环境变量,安装和初始化rosdep,以及处理rosdep更新时的网络和权限问题。最后通过turtlesim进行测试验证配置成功。
本文详细介绍了如何在Ubuntu系统中配置ROSMelodic,包括设置清华源,安装未经认证的软件,安装ROSMelodic桌面完整版,配置环境变量,安装和初始化rosdep,以及处理rosdep更新时的网络和权限问题。最后通过turtlesim进行测试验证配置成功。
1.配置Ubuntu软件和更新
要使得其允许安装不经认证的软件
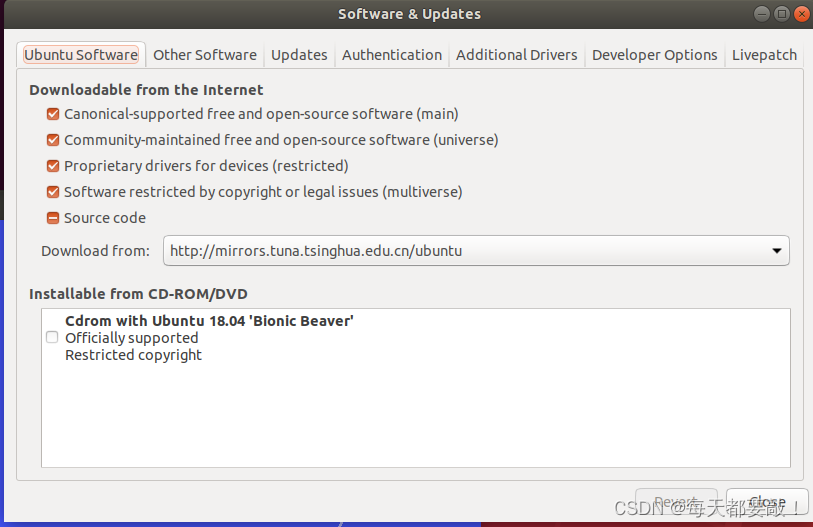
全部勾选
2.设置源
我用的清华源
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'3.设置key
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C6544.安装
sudo apt updatesudo apt install ros-melodic-desktop-full5.配置环境变量
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc6.安装依赖
sudo apt install python-rosdep python-rosinstall python-rosinstall-generator python-wstool build-essentialsudo apt install python-rosdep到这里,基本上不会有大问题
初始化rosdep
sudo rosdep init这里好多人会出现报错,也许网络换成手机热点会过去,但是我还是没过去...
这里有国内大佬专门为国内用户构建的rosdepc,链接在下面:
本文之后,世上再无rosdep更新失败问题!如果有....小鱼就...
简单来说,就是
sudo apt-get install python3-pip
sudo pip3 install rosdepc这里还不行,可能依旧是网络问题,建议在运行上述命令时把网络换成手机热点
然后再
sudo rosdepc initrosdepc update这里报错:IOError: [Errno 13] Permission denied: “/home/XXXX /.ros/roscore-11311.pid"
可能是文件权限问题
然后输入命令
sudo chmod 777 -R ~/.ros/把文件权限改一下再重新update即可
7.测试
打开三个独立的终端
分别按顺序输入
roscorerosrun turtlesim turtlesim_noderosrun turtlesim turtle_teleop_key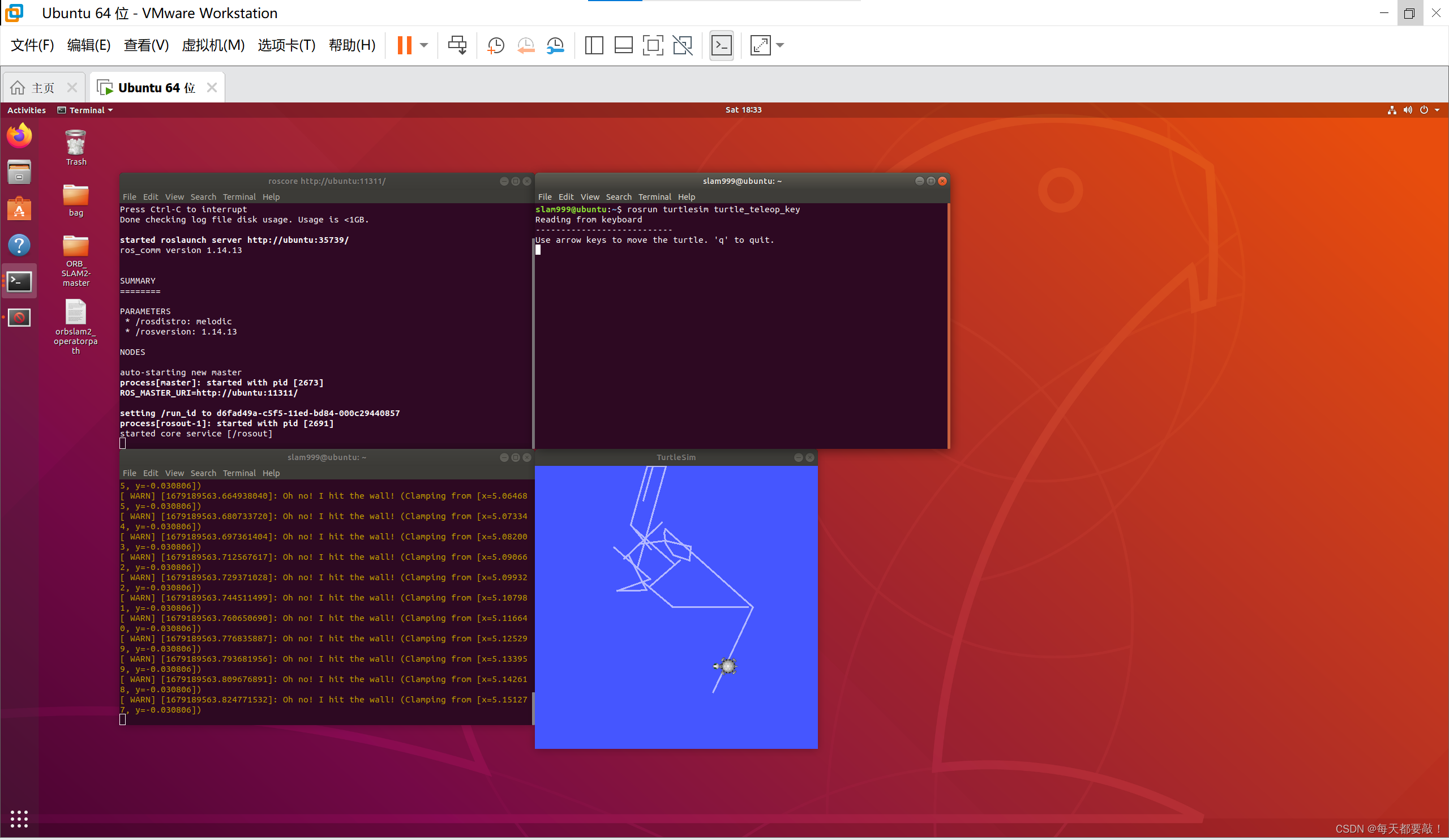
出现小乌龟,可以通过上下左右移动。
-end

















 6125
6125

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









