






 博主在调试独轮车模时,遇到走直线左偏或右偏、动量轮差速增加至饱和的问题。经排查发现问题出在轮子,通过增加胎压、填充海绵等方法制作新轮胎,缓解了问题。但省赛时因轮胎磨损,车模无法拐弯后回正,博主分享了经验并附视频链接。
博主在调试独轮车模时,遇到走直线左偏或右偏、动量轮差速增加至饱和的问题。经排查发现问题出在轮子,通过增加胎压、填充海绵等方法制作新轮胎,缓解了问题。但省赛时因轮胎磨损,车模无法拐弯后回正,博主分享了经验并附视频链接。
在调试过程中,我的车模出现一个难以解决的问题:走直线的话,也就是关闭任何差速的程序,在直立的前提下,使车模走直线,结果是,车模会出现左偏或者右偏的问题。导致我的车模在走直线的过程中,动量轮再慢慢的增加差速,最后达到饱和的状态,所以车模根本无法跑完全程。后来我发现车模在拐弯的时候会使这个差速增加的现象缓解。我后来想了想整个控制框图:
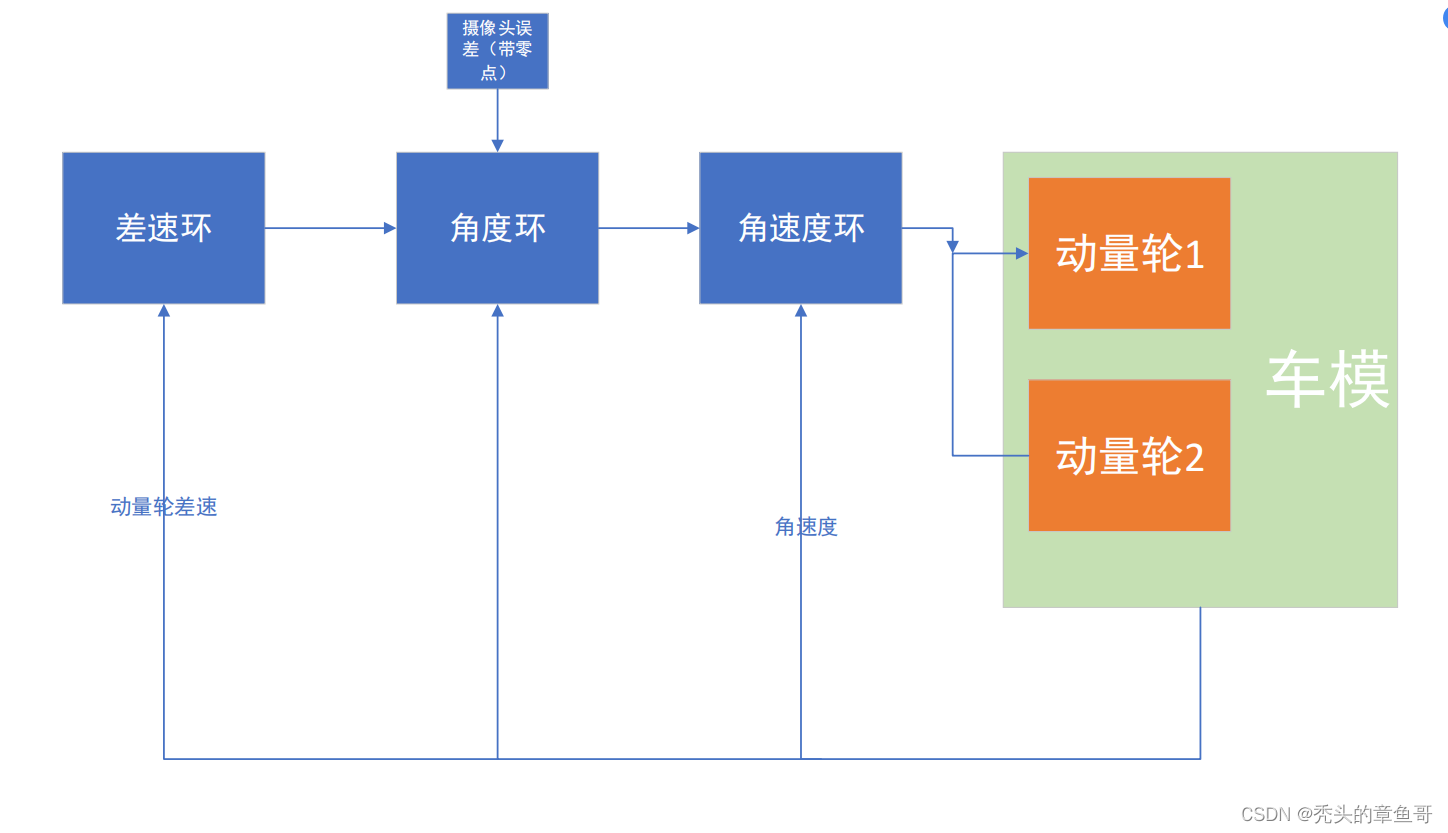
先模拟一下走直线动量轮差速增加的情况:车模直走(摄像头作为负反馈,可以使车身摆正),然而差速环是一 正反馈,他输出的结果作用在角度环上。正常情况是走直线,然后车速为零,显然不符合这个框图,明显该系统一直在补偿一个输入,然后正反馈输出在电机上,导致动量轮一直递增差速。经过我的排查之后发现问题出现在了轮子,我换个轮子之后发现该现象有所缓和,但是还有微微的递增趋势。
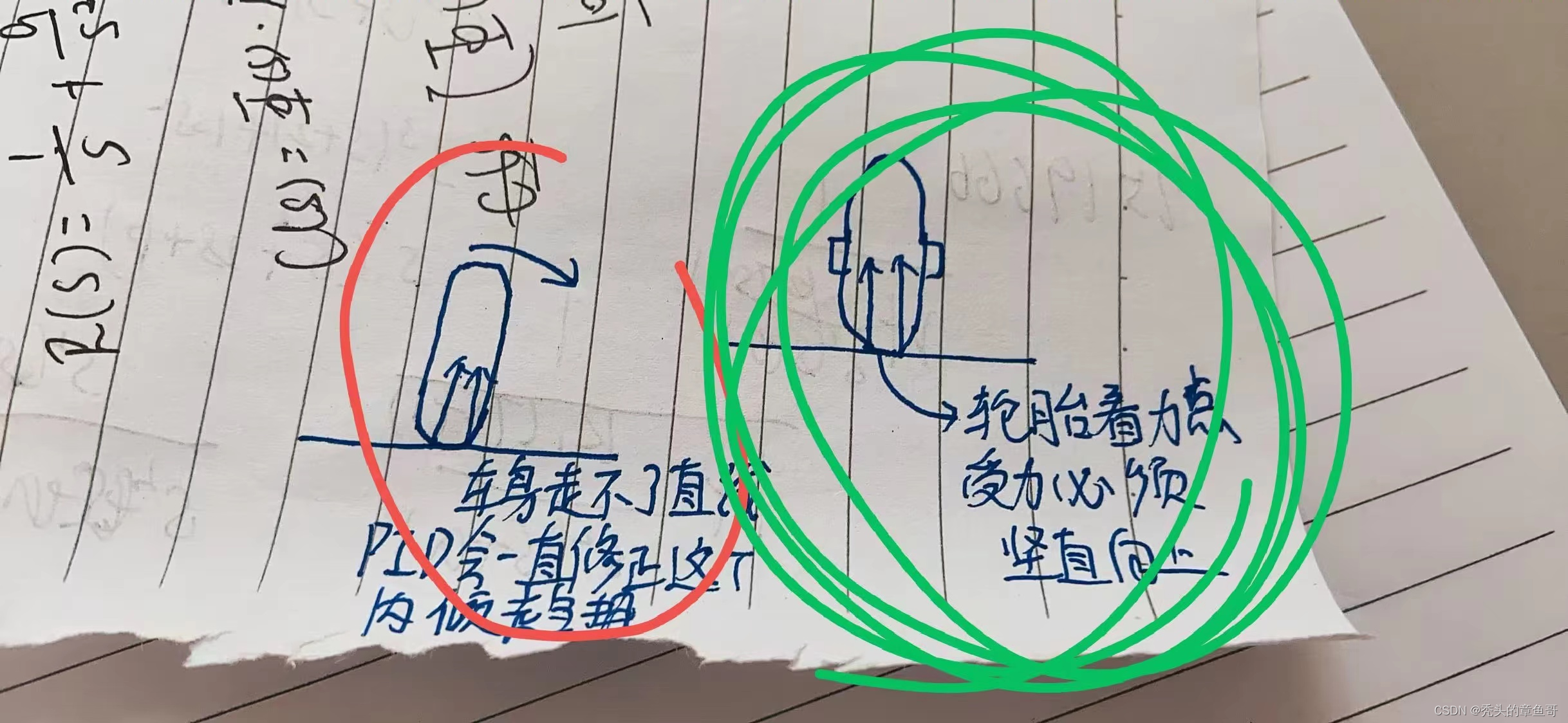
我研究了一下得出一下结论:该车模的行进轮的接触面不可看作质点,他的接触点受材质的限制会和地面不垂直,会出现以上的现象。然后我去做了一个轮子,也就是让轮胎的胎压增加,使接触面受到内胆的挤压,使胎皮于地面呈一个平面。
制作轮子的过程是:找到一个硬质海绵填充物,然后将填充物均匀的塞进轮毂和胎皮之间,至于这个均匀本人没有完全参悟,凭运气吧,填充完之后用轮胎胶封住胎皮与轮毂的接缝处。最后风干。再制作完之后,装配,车模的两个侧板和轮子之间的连接最好要固定,我发现这个也会影响车模的循迹效果。本人是用了两个长螺丝进行固定。
最后我的车模完全解决了我之前的问题,然后有同学说饱和问题,布丁也说过:饱和是因为差速转向的问题,由于的pid的存在,导致差速不能无限制的存在。我的这个方案经过了好几个组的验证,确实可行,当然也有失败的组别,我后来想再复刻一个完美轮胎,但是就是不知道为什么做不出来,也导致了省赛没办法完赛,我未完赛的原因也很简单,我轮胎跑时间长了之后胎皮被磨损,不能做到着力点竖直向上,导致会有一点干扰,然后再经过pid的修正致使我的车模没办法在拐弯后回正,也就是我的角度环在车身偏了之后会去修正,但是有干扰和差速环的存在会只是我的差速环形成一个智能车稳定的输出与我摄像头获取的偏差平衡。达到了一个稳态,也导致我十字没法拐过去,省赛止步于此,当然这纯属我的个人结论,也可能有不对的地方,也可能我没有真正掌握解决饱和的办法,如果我说的有不对的地方还请指正。声明:我是个菜鸡,方案不能保证完全解决该问题,也有风险,谨慎使用。我也希望主办方可以考虑一下对车模进行一下更改,使这个轮胎变成硬质的实心轮胎。对了,有人可能会说,现实中也有公司出售独轮车啊,人家的为啥不会出现这个问题呢?我认为他的独轮车是大轮胎(绝对的,因为是给人使用的),着力点完全可以看为质点,也就不会出现这个问题。
最后,我的车模在更换轮胎后的效果在B站上可以找到,下附链接:【0饱和独轮车】 https://www.bilibili.com/video/BV1QN411U7bz/?share_source=copy_web&vd_source=f89ffd06c4d8a4fb4544ae81d0fe980e

















 2001
2001

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









