







 文章介绍了基于几何自适应控制算法解耦四旋翼无人机姿态动力学的方法,包括建模、动力学分析、控制器设计与实施。通过姿态控制器和动态负载解耦器消除耦合效应,提高飞行控制精度。文中还提及了部分代码实现和控制器调优过程。
文章介绍了基于几何自适应控制算法解耦四旋翼无人机姿态动力学的方法,包括建模、动力学分析、控制器设计与实施。通过姿态控制器和动态负载解耦器消除耦合效应,提高飞行控制精度。文中还提及了部分代码实现和控制器调优过程。
✅作者简介:热爱科研的Matlab仿真开发者,擅长数据处理、建模仿真、程序设计、完整代码获取、论文复现及科研仿真。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知,完整Matlab代码及仿真咨询内容私信。
🌿 往期回顾可以关注主页,点击搜索
⛄ 内容介绍
基于几何自适应控制算法解耦姿态动力学的四旋翼无人机是一种控制方法,旨在将四旋翼无人机的姿态动力学解耦,并实现精确的飞行控制。以下是这种控制方法的基本步骤:
-
建模与动力学分析:对四旋翼无人机进行建模,并进行动力学分析,以获取系统的状态方程和参数。
-
控制目标定义:确定所需的目标姿态和轨迹,例如欧拉角(roll、pitch、yaw)或四元数表示的目标姿态。
-
几何自适应控制器设计:设计几何自适应控制器,其中包括以下主要组件:
-
姿态控制器:开发一个能够追踪目标姿态并生成所需控制指令的姿态控制器。
-
动态负载解耦器:设计一个用于解耦四旋翼无人机姿态控制中动力学负载的控制器,以消除耦合效应。
-
自适应率:通过自适应算法对不可测量或不确定的参数进行估计和调整,以提高系统的适应性和鲁棒性。
-
-
控制器实施与调优:利仿真和实验进行控制器的实施和调优,通过调整参数和调整策略来优化控制性能。
需要注意的是,几何自适应控制可以帮助解耦四旋翼无人机的姿态动力学,并提供更好的控制性能。然而,这种控制方法的设计和实施需要深入理解系统的动力学特性和参数不确定性,并对控制算法和参数进行仔细调整和验证。
⛄ 部分代码
function Xdot = eom_brescianini(t, X, k, param)e3 = [0, 0, 1]';m = param.m;J = param.J;[~, v, R, W] = split_to_states(X);desired = command(t);[f, M, ~, ~] = position_control(X, desired, k, param);[f, M] = saturate_fM(f, M, param);x_dot = v;v_dot = param.g * e3 ...- f / m * R * e3;if param.use_disturbancesv_dot = v_dot + param.W_x * param.theta_x / m;endif param.use_disturbancesW_dot = J \ (-hat(W) * J * W + M + param.W_R * param.theta_R);elseW_dot = J \ (-hat(W) * J * W + M);endR_dot = R * hat(W);Xdot = [x_dot; v_dot; W_dot; reshape(R_dot,9,1)];end
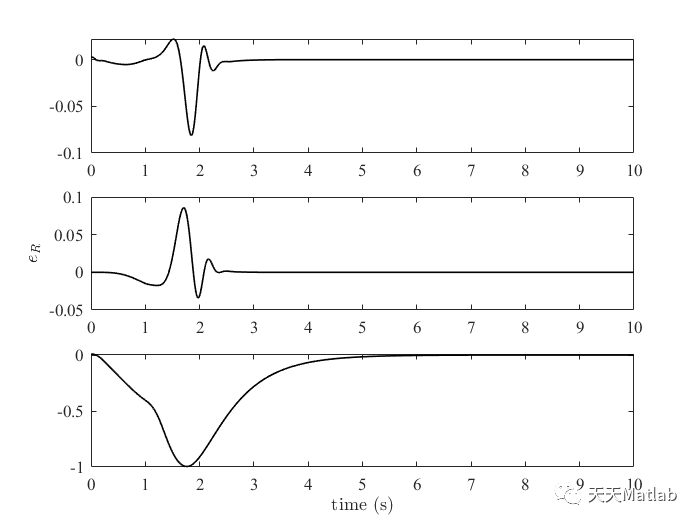
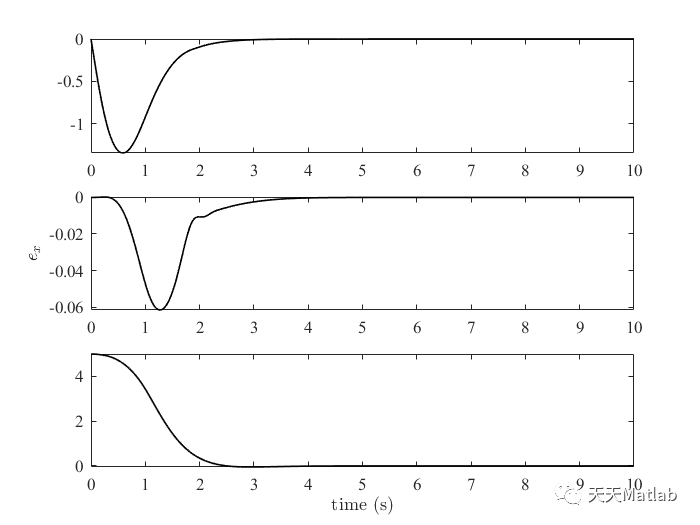
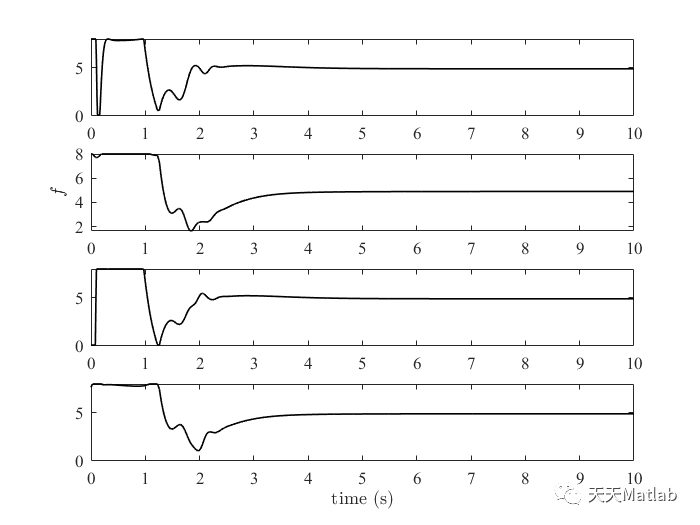
⛄ 运行结果
⛄ 参考文献


















 256
256

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











