









我们在进行三维重建的过程之中,进行标定的时候,尤其是两个或者多个相机而言,需要知道相对位置姿态,但是相互转化的过程中会遇到使用旋转矩阵求解问题。一般是很难在三维旋转矩阵之中找到我们想要知道的量,因此,这里是将旋转矩阵进行转换的过程,以及各个过程之中需要注意的地方。
旋转矩阵转旋转向量的过程,在下载资源之中,之前已经整理过了,这里就不再进行整理,请看博客的下载资源。
- 欧拉角
1.二维空间旋转矩阵的情况:
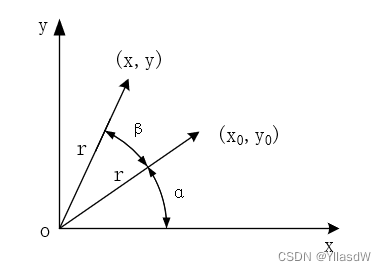
上述的点坐标可以进行一个如下表示:(优快云中的公式编辑器是真的难用)
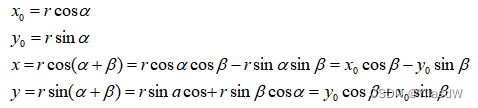
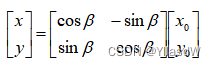
可以得到如下关系:
2.三维空间旋转矩阵的情况:右手坐标系下
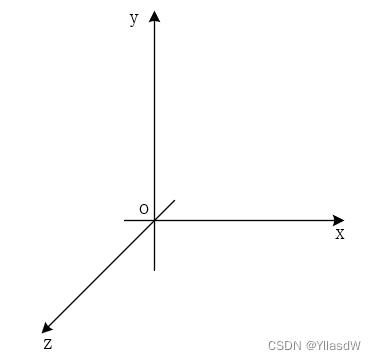
旋转表示如下所示:
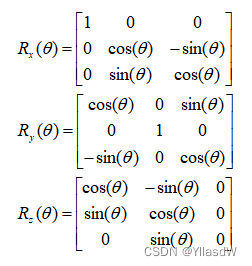
上述之中的y方向是在右手坐标系下,因此,sin和cos的情况是和x、y方向是不同的。
3.万向节死锁问题的出现
这个理解过程直接是使用公式进行理解
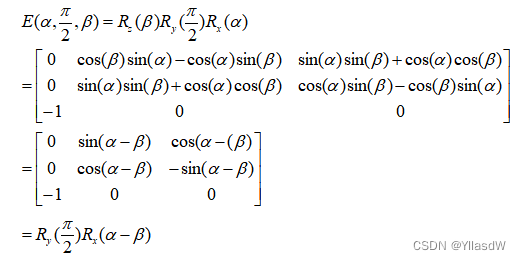
这里当关于y轴旋转90度的时候,就是会可以将它看成只是按照x轴进行旋转,这就是产生万向节死锁的原因。
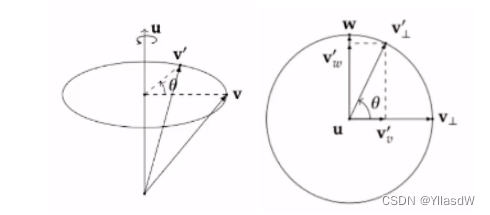
- 轴角表示
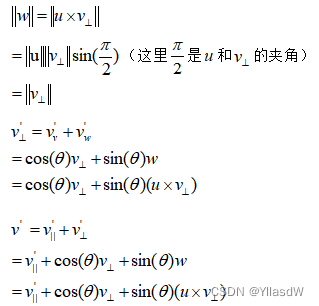
又因为叉乘遵守分配律,所以
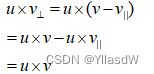
进而得知,
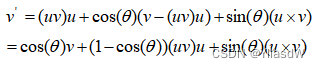
其实这就是一个罗德里格斯公式的推导过程,具体的使用过程是见博客之中罗格里格斯公式的推导,具体中有矩阵的使用。
- 四元数形式
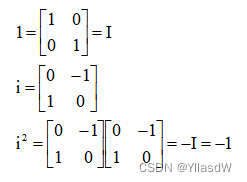
1.复数之中的运算用矩阵表示如下所示:
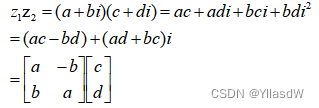
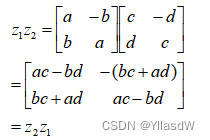
可见矩阵是满足交换律的,这里应当注意的是如何使用复数表示矩阵。
特殊的矩阵表达形式
2. 复数与二维旋转
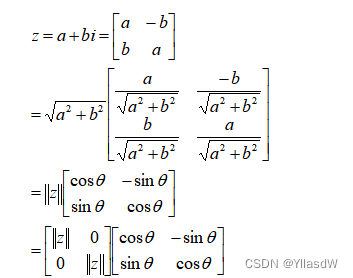
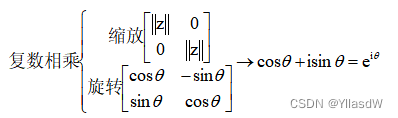
其前面的矩阵称为缩放矩阵,后面的是旋转矩阵。
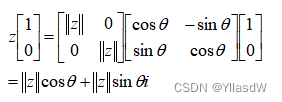
3.两种转换形式
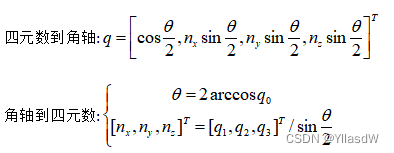
4.四元数与角轴之间的转换
详见博客文档下载,我写到一个word里面了,可以下载看看,博客可真是个存档的好东西。https://download.youkuaiyun.com/download/m0_47489229/86609016 https://download.youkuaiyun.com/download/m0_47489229/86609016
https://download.youkuaiyun.com/download/m0_47489229/86609016

















 782
782

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









