




 本文详细介绍了在Ubuntu18环境下安装配置ORB_SLAM2的过程,包括Pangolin、Opencv等依赖库的安装,以及ORB_SLAM2的编译运行步骤,特别针对单目视觉SLAM的应用场景。
本文详细介绍了在Ubuntu18环境下安装配置ORB_SLAM2的过程,包括Pangolin、Opencv等依赖库的安装,以及ORB_SLAM2的编译运行步骤,特别针对单目视觉SLAM的应用场景。
基于视觉的机器人SLAM入门(Ubuntu18 ORB_SLAM2的安装配置以及SLAM单目运行实例)
目录
安装工具
先安装需要的cmake、gcc、g++、git工具
sudo apt-get install cmake
sudo apt-get install git
sudo apt-get install gcc g++

安装及配置Pangolin
安装依赖项
sudo apt-get install libglew-dev
sudo apt-get install libboost-dev libboost-thread-dev libboost-filesystem-dev
sudo apt-get install libpython2.7-dev
下载Pangolin
git clone https://github.com/stevenlovegrove/Pangolin.git
编译安装
mkdir build
cd build
cmake ..
sudo make //也可以采用-j的方式,但是要电脑性能好点的采用
 在cmake的时候可能会出现下面的问题
在cmake的时候可能会出现下面的问题
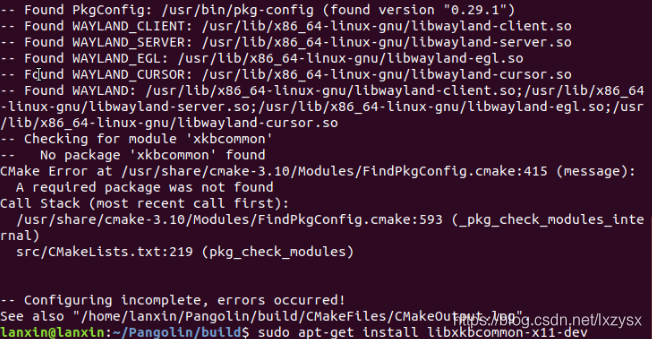
解决办法是:
sudo apt-get install libxkbcommon-x11-dev
 完成之后就重新编译一下
完成之后就重新编译一下 cmake ..
然后再执行sudo make
安装完成之后,就是编译安装
sudo make install
pangolin就安装配置好了
安装及配置Opencv
安装依赖项
sudo apt- 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2686
2686

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









