



 本文提供了解决 ROS Kinetic 在 Ubuntu 16.04 上安装时遇到的依赖问题的方法,包括使用 aptitude 安装、解决锁文件冲突等步骤,并介绍了 rosdep 的初始化与更新技巧。
本文提供了解决 ROS Kinetic 在 Ubuntu 16.04 上安装时遇到的依赖问题的方法,包括使用 aptitude 安装、解决锁文件冲突等步骤,并介绍了 rosdep 的初始化与更新技巧。
ros安装官方链接:cn/kinetic/Installation/Ubuntu - ROS Wiki
建议参考链接:Ubuntu16.04 安装ROS Kinetic 究级详细教程_IU知恩于心的博客-优快云博客_ubuntu16.04安装ros
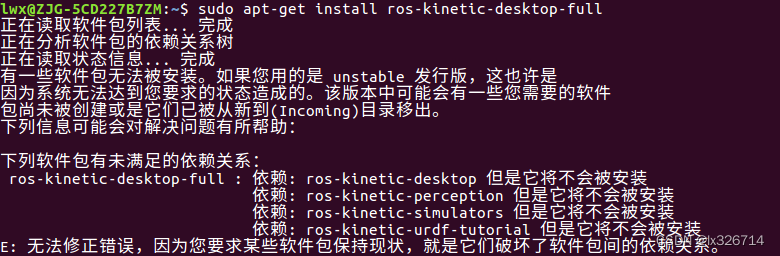
问题现象:
下列软件包有未满足的依赖关系:
ros-kinetic-desktop-full : 依赖: ros-kinetic-desktop 但是它将不会被安装
依赖: ros-kinetic-perception 但是它将不会被安装
依赖: ros-kinetic-simulators 但是它将不会被安装
依赖: ros-kinetic-urdf-tutorial 但是它将不会被安装
E: 无法修正错误,因为您要求某些软件包保持现状,就是它们破坏了软件包间的依赖关系
解决措施:
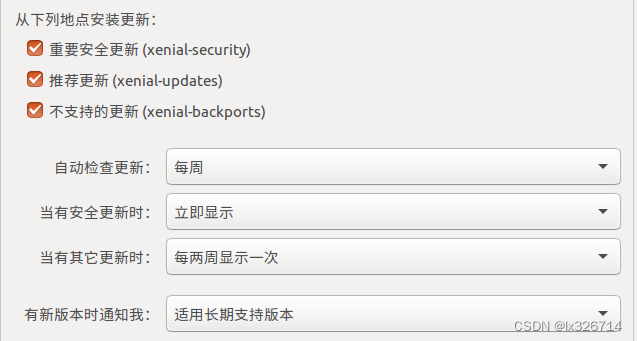
1.可以先打开软件更新安装再尝试是否可以安装成功
2. 如果不行的话可以终端输入命令:
sudo apt install aptitude下载aptitude
再输入命令:sudo aptitude install ros-kinetic-desktop-full
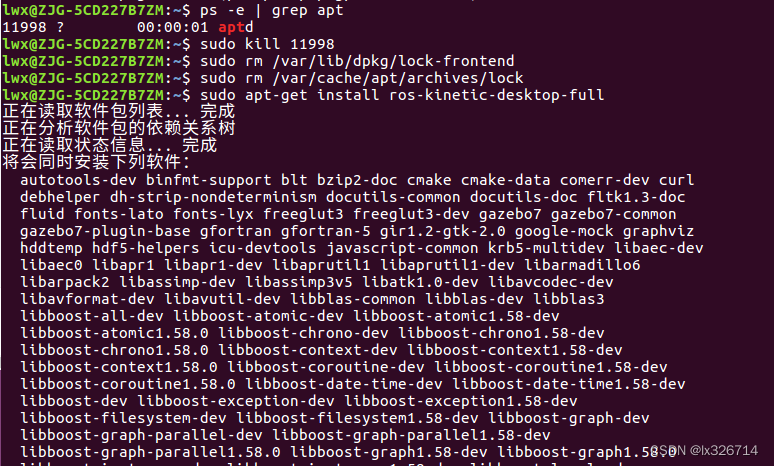
3. 可能出现的问题
E: 无法获得锁 /var/lib/dpkg/lock-frontend - open (11: 资源暂时不可用)
E: 无法获取 dpkg 前端锁 (/var/lib/dpkg/lock-frontend),是否有其他进程正占用它?
解决方案:
先查看
ps -e | grep apt
后续如下
参考链接:ros-kinetic-desktop-full安装:依赖问题解决_周牧之的博客-优快云博客
安装rosdepc
sudo pip install rosdepc
初始化 rosdep
sudo rosdep init rosdep update
遇到的问题例子:
ERROR: error loading sources list:
<urlopen error <urlopen error timed out> (https://raw.githubusercontent.com/ros/rosdistro/master/melodic/distribution.yaml)>
ERROR: cannot download default sources list from:
https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/sources.list.d/20-default.list
Website may be down.
ubuntu16 安装ROS Kinetic:sudo rosdep init 和 rosdep update 报错_sunshinefcx的博客-优快云博客
以上搞起来都很麻烦,初始化rosdep最快捷方案我知道的是鱼香大神的方法了,链接如下
error loading sources list: ('The read operation timed out',)解决办法!! - Gaowaly - 博客园
某乎链接:本文之后,世上再无rosdep更新失败问题!如果有....小鱼就... - 知乎
最后,如果每天需要在ubuntu上简单记录一些事情,可以使用rednotebook记录,安装如下
1.sudo add-apt-repository ppa:rednotebook/stable
2.sudo apt update
3.sudo apt install rednotebook
参考链接:ubuntu1604 安装RedNotebook_generalsong的博客-优快云博客
ubuntu录制屏幕软件:
sudo apt-get install simplescreenrecorder peek 安装:
sudo add-apt-repository ppa:peek-developers/stable
sudo apt update
sudo apt install peek--小白记录使用

















 1323
1323

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









