



D2. Red Light, Green Light (Hard version)
对于每个位置是否能在 1010010^{100}10100 秒内离开,实际上等价于问你从该位置开始走是否会陷入死循环。
当我们经过每一个红绿灯灯,要么是朝向是往左的,记为 LLL,要么朝向是往右的,记为 RRR。
不妨假设我们当前所在的位置是第 iii 个红绿灯处,即位置为 pip_ipi,且方向为 RRR,该灯此时为红色。
设往右走到第 jjj 个红灯处需要折返,其位置为 pjp_jpj,则需要满足
pj−pi+di≡dj(modk)(1)
p_j-p_i+d_i\equiv d_j\pmod k\tag{1}
pj−pi+di≡dj(modk)(1)
设往左走到第 jjj 个红灯处需要折返,其位置为 pjp_jpj,则需要满足
pi−pj+di≡dj(modk)(2)
p_i-p_j+d_i\equiv d_j\pmod k\tag{2}
pi−pj+di≡dj(modk)(2)
而对于一个红灯 iii 而言,从 iii 出发往左边或右边走,至多碰到一个红灯。
不妨预处理出每个红灯往左或右走遇到的第一个红灯,那么整个路线图就是一个有向图。
如果无法走出去,说明我们从图上的一点出发一定会走到一个环内。
向右走
考虑如何建图,对于一个红绿灯 iii,可以设 iii 表示往右走,i+ni+ni+n 表示往左走。
di−pi≡dj−pj(modk)(1’)
d_i-p_i\equiv d_j-p_j\pmod k\tag{1'}
di−pi≡dj−pj(modk)(1’)
所以对于每个红绿灯 iii,我们只要从后往前找离 iii 最近的满足式子 (1′)(1')(1′) 的红绿灯即可。
即 i→j+ni\rarr j+ni→j+n 连边,因为我们已经规定所有 i<ni<ni<n 都表示往右边走,所有 j>nj>nj>n 都表示往左边走。
所以我们对于每个红绿灯 iii 要往右边走的话,假设遇到的第一个红灯是 jjj,则必须连接 j+nj+nj+n。
vector <int> g[2*n + 2];
map <int, int> R;
for (int i = n; i >= 1; i--) {
int res = ((d[i] - p[i]) % k + k) % k;
if (R.count(res)) g[i].emplace_back(R[res]);
R[res] = i + n;
}
向左走
对于每一个红绿灯 i+ni + ni+n,我们只需要从前往后找离 iii 最近的满足式子 (2′)(2')(2′) 的红绿灯即可。
di+pi≡dj+pj(modk)(2’)
d_i+p_i\equiv d_j+p_j\pmod k\tag{2'}
di+pi≡dj+pj(modk)(2’)
map <int, int> L;
for (int i = 1; i <= n; i++) {
int res = (d[i] + p[i]) % k;
if (L.count(res)) g[i + n].emplace_back(L[res]);
L[res] = i;
}
判断环
接下来考虑如何判断每个点是否一定到达环?
根据上面的分析,一个红绿灯朝一个方向至多只有一条出边。
考虑直接从入度为 0 的点开始 DFS,对于图中的每一个点维护两个标记,第一个是否被访问过,第二个是是否会到达环。
对于当前的一次 DFS,如果发现从 uuu 出发有一条边到达 vvv 且 vvv 是被访问过的点,说明这整个连通块都能到达环。
因为从入度为 000 的点开始,最终如果存在点没被访问过,说明这个点必然存在环里。
// 是否被访问过,是否能到达环
vector <int> vis (2*n + 1, 0), circle(2*n + 1, 0);
function <void(int)> dfs =[&] (int u) {
vis[u] = 1;
for (auto v : g[u]) {
if (!vis[v]) {
dfs(v);
}else {
circle[u] = 1;
}
if (circle[v] == 1) circle[u] = 1;
}
};
// 更新入度
vector <int> indgree(2*n + 1, 0);
for (int i = 1; i <= 2*n; i++) {
for (auto v : g[i]) {
indgree[v] ++;
}
}
// 找到所有入度为0的点进行搜索
for (int i = 1; i <= 2*n; i++) {
if (!indgree[i] && !vis[i]) {
dfs (i);
}
}
// 如果没被搜索过,说明在循环内
for (int i = 1; i <= 2*n; i++) {
if (vis[i] == 0 && indgree[i]) circle[i] = 1;
}
因为题目会给出若干个起点,且规定方向是朝右,我们需要判断这个起点是否会陷入循环。
找到这个起点往右走能到达的第一个红灯即可。
假设其第一个到达的红灯是 iii,则有
pi−x≡di(modk)
p_i-x\equiv d_i\pmod k
pi−x≡di(modk)
等价于
pi−di≡x(modk)
p_i-d_i\equiv x\pmod k
pi−di≡x(modk)
可以对每个 (pi−di)(modk)(p_i-d_i)\pmod k(pi−di)(modk) 按余数分类,然后每个类里存放红绿灯的位置序列,二分查找第一个大于等于 xxx 的位置的红灯即可。
不妨设这个红灯是 iii,则只需要判断 circle[i+n]circle[i+n]circle[i+n] 是否为 111 即可。
#include <bits/stdc++.h>
using namespace std;
#pragma GCC optimize(2)
#define ll long long
#define PII pair<int,int>
#define endl "\n"
#define INF 1e18
#define int long long
const int N = 1000005; // 1e6 + 5
void solve () {
int n, k;
cin >> n >> k;
vector <int> p(n + 1), d(n + 1);
for (int i = 1; i <= n; i++) cin >> p[i];
for (int i = 1; i <= n; i++) cin >> d[i];
vector <int> g[2*n + 2];
//往右边建边
map <int, int> R;
for (int i = n; i >= 1; i--) {
int res = ((d[i] - p[i]) % k + k) % k;
if (R.count(res)) g[i].emplace_back(R[res]);
R[res] = i + n;
}
//往左边建边
map <int, int> L;
for (int i = 1; i <= n; i++) {
int res = (d[i] + p[i]) % k;
if (L.count(res)) g[i + n].emplace_back(L[res]);
L[res] = i;
}
// 是否被访问过,是否能到达环
vector <int> vis (2*n + 1, 0), circle(2*n + 1, 0);
function <void(int)> dfs =[&] (int u) {
vis[u] = 1;
for (auto v : g[u]) {
if (!vis[v]) {
dfs(v);
}else {
circle[u] = 1;
}
if (circle[v] == 1) circle[u] = 1;
}
};
// 更新入度
vector <int> indgree(2*n + 1, 0);
for (int i = 1; i <= 2*n; i++) {
for (auto v : g[i]) {
indgree[v] ++;
}
}
// 找到所有入度为0的点进行搜索
for (int i = 1; i <= 2*n; i++) {
if (!indgree[i] && !vis[i]) {
dfs (i);
}
}
// 如果没被搜索过,说明在循环内
for (int i = 1; i <= 2*n; i++) {
if (vis[i] == 0 && indgree[i]) circle[i] = 1;
}
map <int, int> pos1;
for (int i = 1; i <= n; i++) pos1[p[i]] = i;
map <int, vector<int>> pos2;
for (int i = 1; i <= n; i++) {
pos2[((p[i] - d[i]) % k + k) % k].emplace_back(p[i]);
}
int q;
cin >> q;
while (q--) {
int x;
cin >> x;
if (!pos2.count(x%k)) cout << "YES" << endl;
else {
auto pos = lower_bound(pos2[x % k].begin(), pos2[x % k].end(), x);
if (pos == pos2[x % k].end()) cout << "YES" << endl;
else {
cout << (circle[pos1[*pos] + n] == 1 ? "NO" : "YES") << endl;
}
}
}
}
signed main () {
std::ios::sync_with_stdio(false), cin.tie(0), cout.tie(0);
int t;
cin >> t;
while(t--){
solve();
}
}
E. Grid Coloring
受到惩罚的条件是
- 受惩罚的格子距离当前被涂色的格子的水平距离或竖直距离最远。
- 满足 111 的所有格子中距离当前涂色的格子的曼哈顿距离最大。
根据条件 111 可知,如果矩阵四条边上都有格子被染色,那么矩阵中任意一个格子被染色,都只会导致四条边中的某几条边上的格子受到惩罚。
因为我们一定能找到一个最小矩形将当前被涂色的格子全部圈起来。
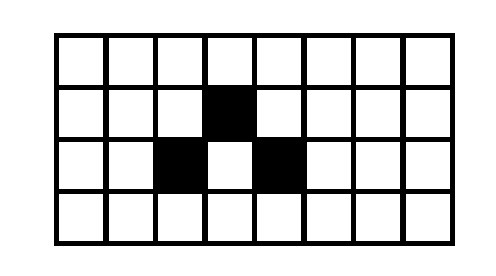
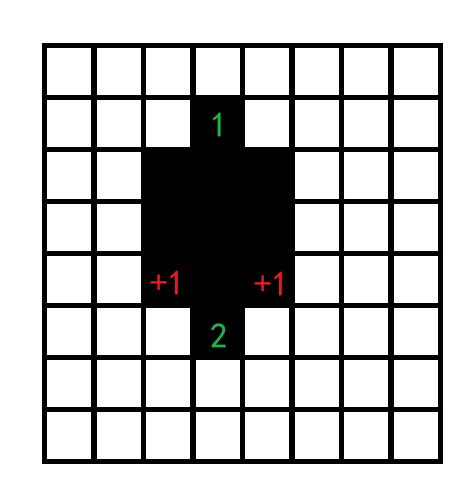
最小的矩形是绿色方框所示的 2×32\times 32×3 矩形。
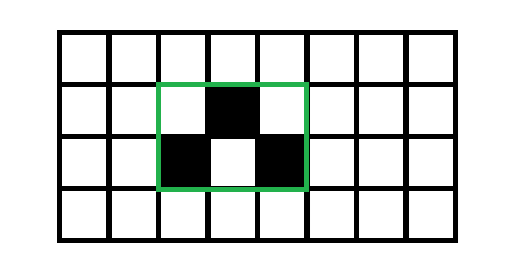
如果我们给最小矩形内的格子染色,那么受到惩罚的必然是这个最小矩形的某些边界上的格子,且最小矩形的非边界部分一定不会受到惩罚。
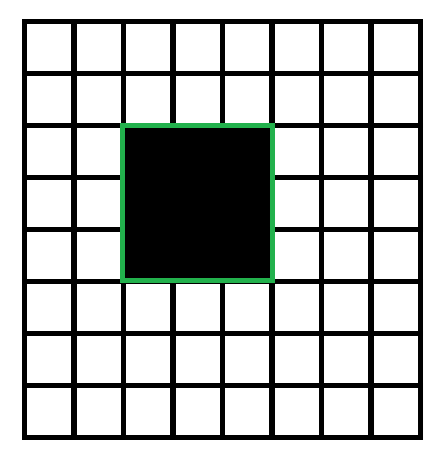
于是有一个非常自然的思路,就是先给一个小方格涂色,此时最小矩形是 1×11\times 11×1 大小,若最小矩形内所有方格涂满了颜色,则往最小矩形外的相邻一个染色使得最小矩形被逐渐扩大,然后再重复这样的过程,直到最小矩形扩大到 n×mn\times mn×m。
但是也有问题,就是我们往最小矩形外拓展的次序需要是合理的。
如当前最小矩形内部全部被涂色
我们现在往外拓展一个格子,此时最小矩形变成
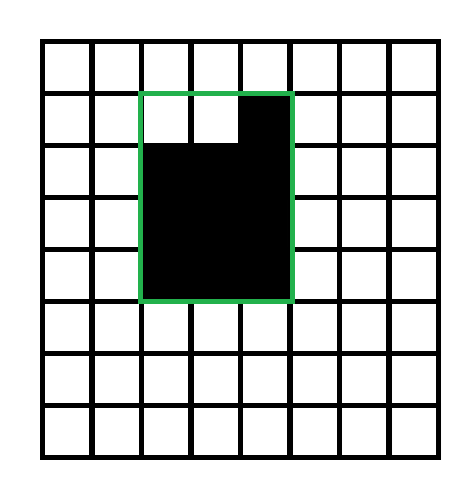
如果我们给剩下的两个矩形填色的话,绿色矩形的右下角会新增惩罚值会增加 222,这个惩罚值增加过多了。
我们可以采取这样的扩展策略,当最小矩阵内部满了,那么采取关于中心对称的策略进行染色。
对于这幅图,我们对称地染色,先把中心点正上方的格子染色,图中红色的表示惩罚值 +1+ 1+1,绿 111 会给原矩阵内部的格子加上 111 个惩罚值。
然后再染对称点,也就是用绿 222 标识的格子,此时受罚点是与绿 111 ,其惩罚值为 111,然后染色可以按照下图顺序进行
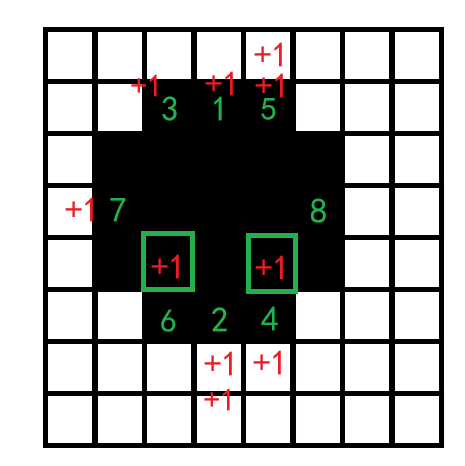
接下来给绿 333 染色表示它是第三个被染色的,然后绿 222 的惩罚值加 111。
接下来给绿 444 染色表示它是第四个被染色的,然后绿 333 的惩罚值加 111。
以此类推,当中心点的上下被染色完了之后去染色左右的边界上的点。
还是每两次染色为一组,染关于中心点对称的点。
最后还剩下四个角,可以分成两组染色,每组两个点,每个点关于中心点对称。
此时我们如果作出染色图,我们会发现边角中的点的惩罚值至多为 111。这便于我们下一次扩展。
采用这样的染色方法,只能染出一个正方形,其边长至多为 min{n,m}\min\{n,m\}min{n,m}。
若 n>mn>mn>m,说明竖直方向还没染完,依旧采用刚刚的策略,把正方形往上下扩展。
若 n<mn<mn<m,说明水平方向还没染完,依旧采用刚刚的策略,把正方形往左右扩展。
#include <bits/stdc++.h>
using namespace std;
#pragma GCC optimize(2)
#define ll long long
#define PII pair<int,int>
#define endl "\n"
#define INF 1e18
#define int long long
const int N = 1000005; // 1e6 + 5
void solve () {
int n, m;
cin >> n >> m;
int min_len = min(n, m);
int mid_x = (n + 1)/2, mid_y = (m + 1)/2;
cout << mid_x << ' ' << mid_y << endl;
for (int i = 1; i <= min_len/2; i++) {
int len = i * 2 + 1;
// 处理上下
cout << mid_x - i << ' ' << mid_y << endl;
cout << mid_x + i << ' ' << mid_y << endl;
for (int j = 1; j <= len/2 - 1; j++) {
// 左上一个,右下一个
cout << mid_x - i << ' ' << mid_y - j << endl;
cout << mid_x + i << ' ' << mid_y + j << endl;
// 右上一个,左下一个
cout << mid_x - i << ' ' << mid_y + j << endl;
cout << mid_x + i << ' ' << mid_y - j << endl;
}
// 处理左右
cout << mid_x << ' ' << mid_y - i << endl;
cout << mid_x << ' ' << mid_y + i << endl;
for (int j = 1; j <= len/2 - 1; j++) {
// 左上一个,右下一个
cout << mid_x - j << ' ' << mid_y - i << endl;
cout << mid_x + j << ' ' << mid_y + i << endl;
// 左下一个,右上一个
cout << mid_x + j << ' ' << mid_y - i << endl;
cout << mid_x - j << ' ' << mid_y + i << endl;
}
// 处理四个对角
cout << mid_x - i << ' ' << mid_y - i << endl;
cout << mid_x + i << ' ' << mid_y + i << endl;
cout << mid_x + i << ' ' << mid_y - i << endl;
cout << mid_x - i << ' ' << mid_y + i << endl;
}
if (n > m) {
// 往上下两边扩展。
for (int i = 1; i <= (n - min_len)/2; i++) {
int len = m;
// 处理上下
cout << mid_x - min_len/2 - i << ' ' << mid_y << endl;
cout << mid_x + min_len/2 + i << ' ' << mid_y << endl;
for (int j = 1; j <= len/2; j++) {
// 左上一个,右下一个
cout << mid_x - min_len/2 - i << ' ' << mid_y - j << endl;
cout << mid_x + min_len/2 + i << ' ' << mid_y + j << endl;
// 右上一个,左下一个
cout << mid_x - min_len/2 - i << ' ' << mid_y + j << endl;
cout << mid_x + min_len/2 + i << ' ' << mid_y - j << endl;
}
}
} else if (m > n) {
// 往上下两边扩展。
for (int i = 1; i <= (m - min_len)/2; i++) {
int len = n;
// 处理上下
cout << mid_x << ' ' << mid_y - min_len/2 - i << endl;
cout << mid_x << ' ' << mid_y + min_len/2 + i << endl;
for (int j = 1; j <= len/2; j++) {
// 左上一个,右下一个
cout << mid_x - j << ' ' << mid_y - min_len/2 - i << endl;
cout << mid_x + j << ' ' << mid_y + min_len/2 + i << endl;
// 右上一个,左下一个
cout << mid_x + j << ' ' << mid_y - min_len/2 - i << endl;
cout << mid_x - j << ' ' << mid_y + min_len/2 + i << endl;
}
}
}
}
signed main () {
std::ios::sync_with_stdio(false), cin.tie(0), cout.tie(0);
int t;
cin >> t;
while(t--){
solve();
}
}



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











