



0 前言
🔥这两年开始毕业设计和毕业答辩的要求和难度不断提升,传统的毕设题目缺少创新和亮点,往往达不到毕业答辩的要求,这两年不断有学弟学妹告诉学长自己做的项目系统达不到老师的要求。并且很难找到完整的毕设参考学习资料。
为了大家能够顺利以及最少的精力通过毕设,学长分享优质毕业设计项目提供大家参考学习,今天要分享的是
🚩 毕业设计 深度学习yolo11森林火灾预警烟雾检测系统(源码+论文)
🥇学长这里给一个题目综合评分(每项满分5分)
难度系数:3分
工作量:4分
创新点:5分
🧿 项目分享:见文末!
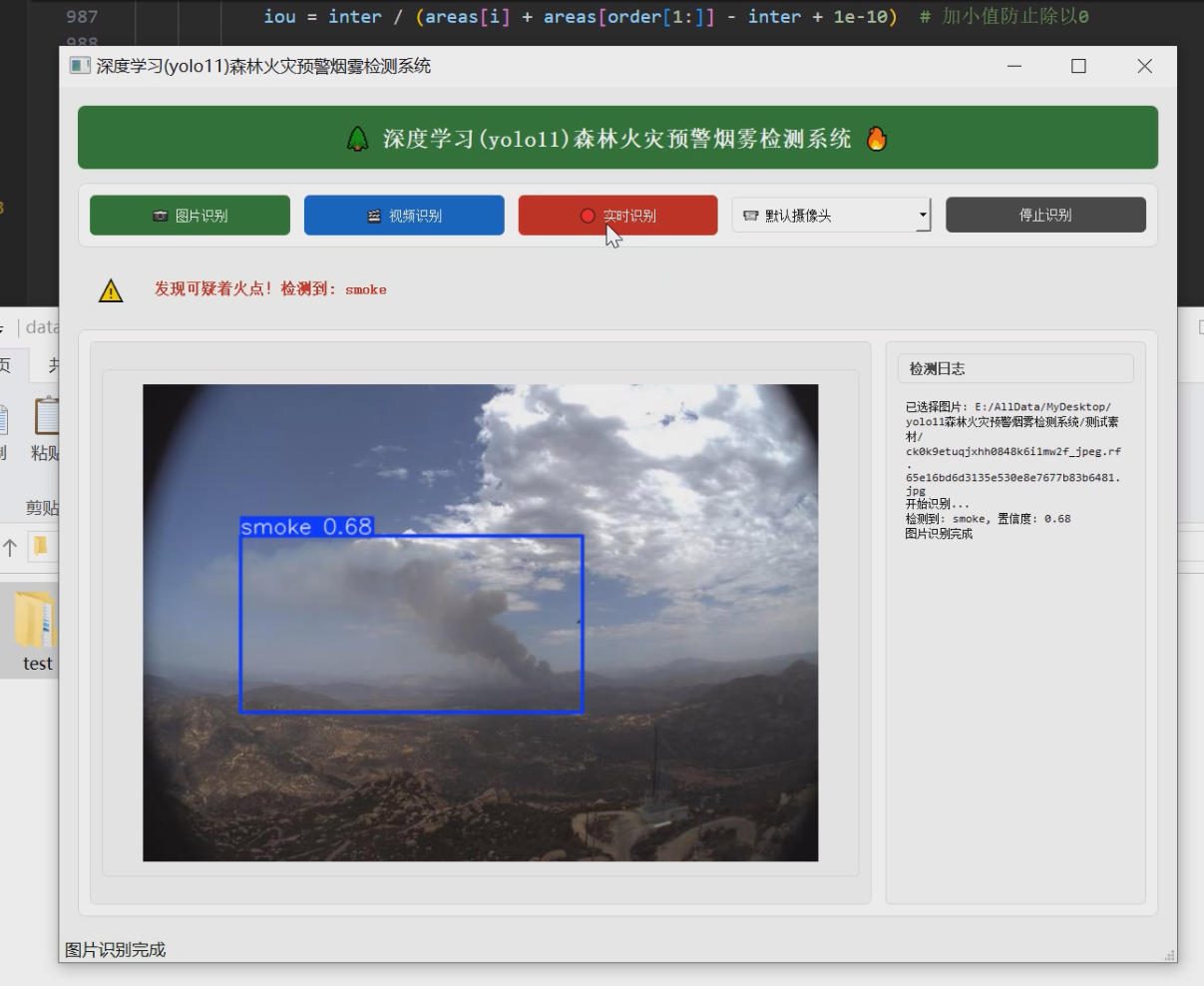
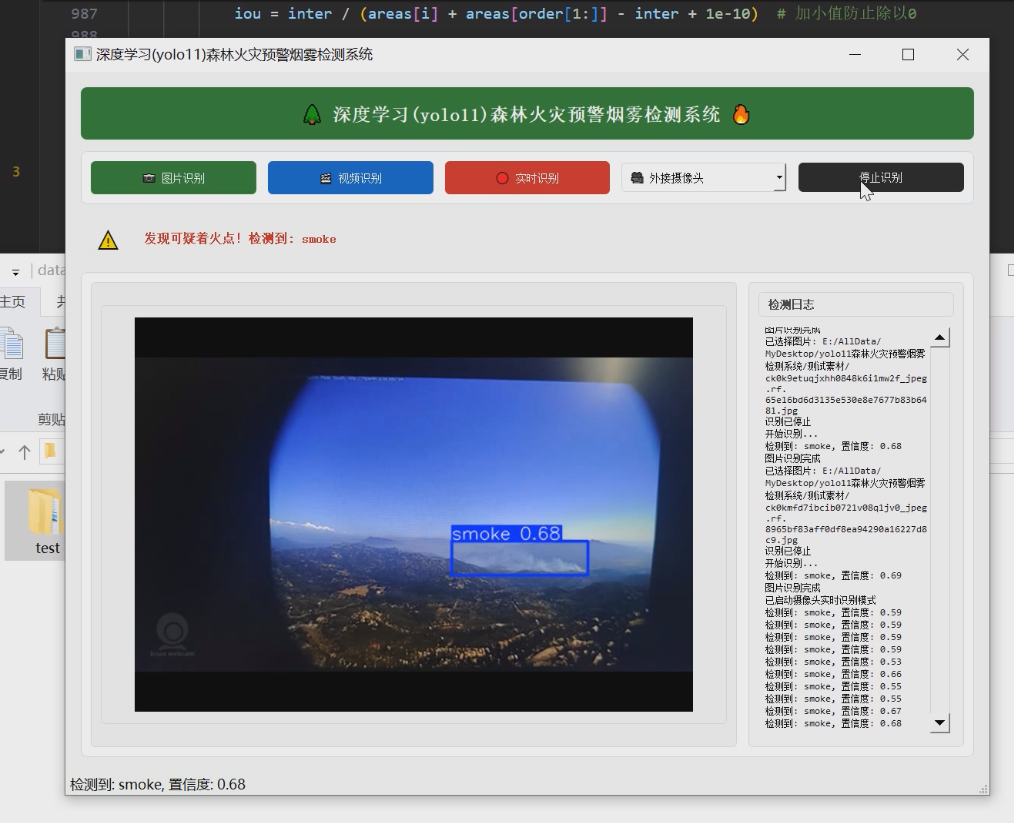
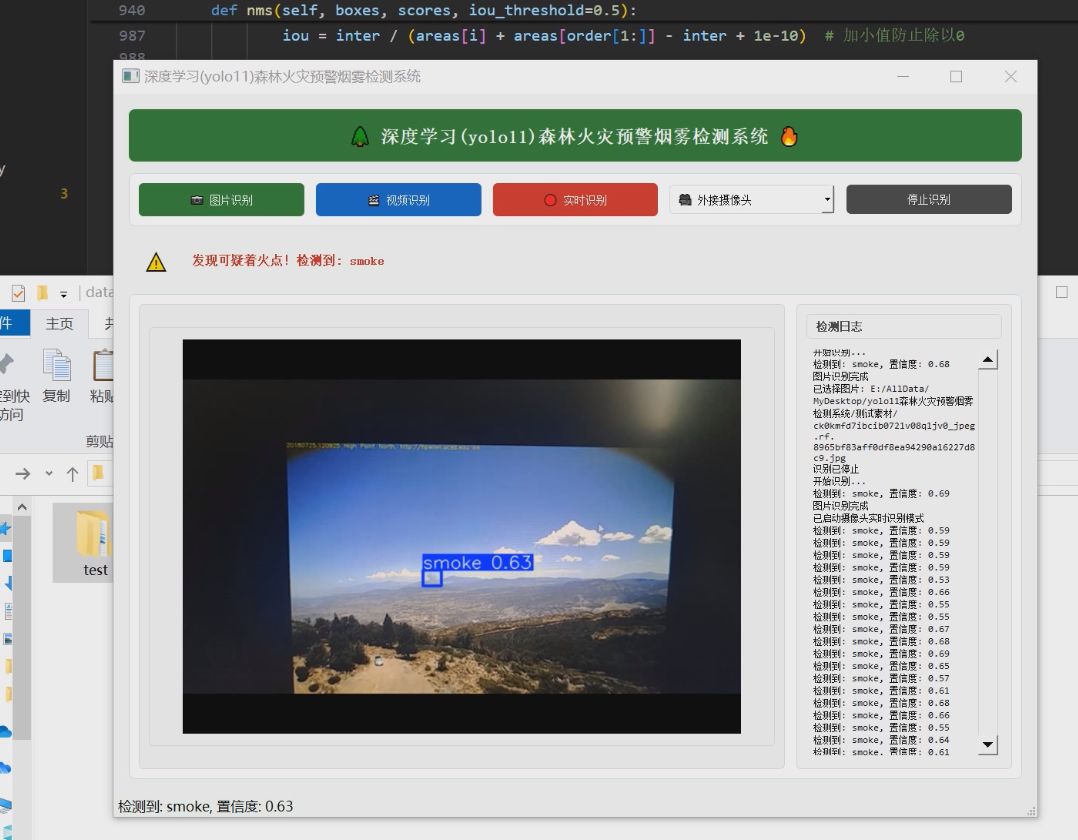
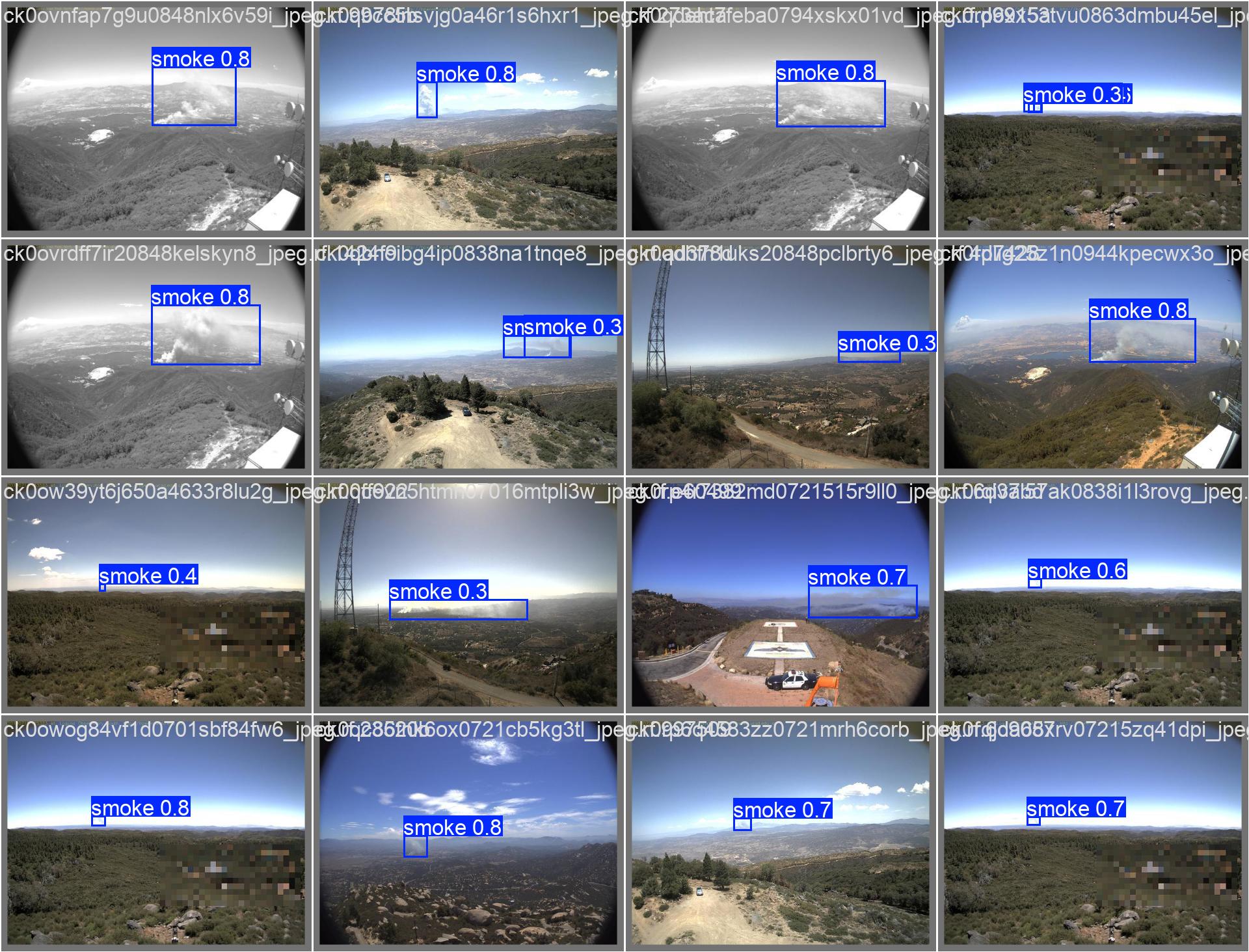
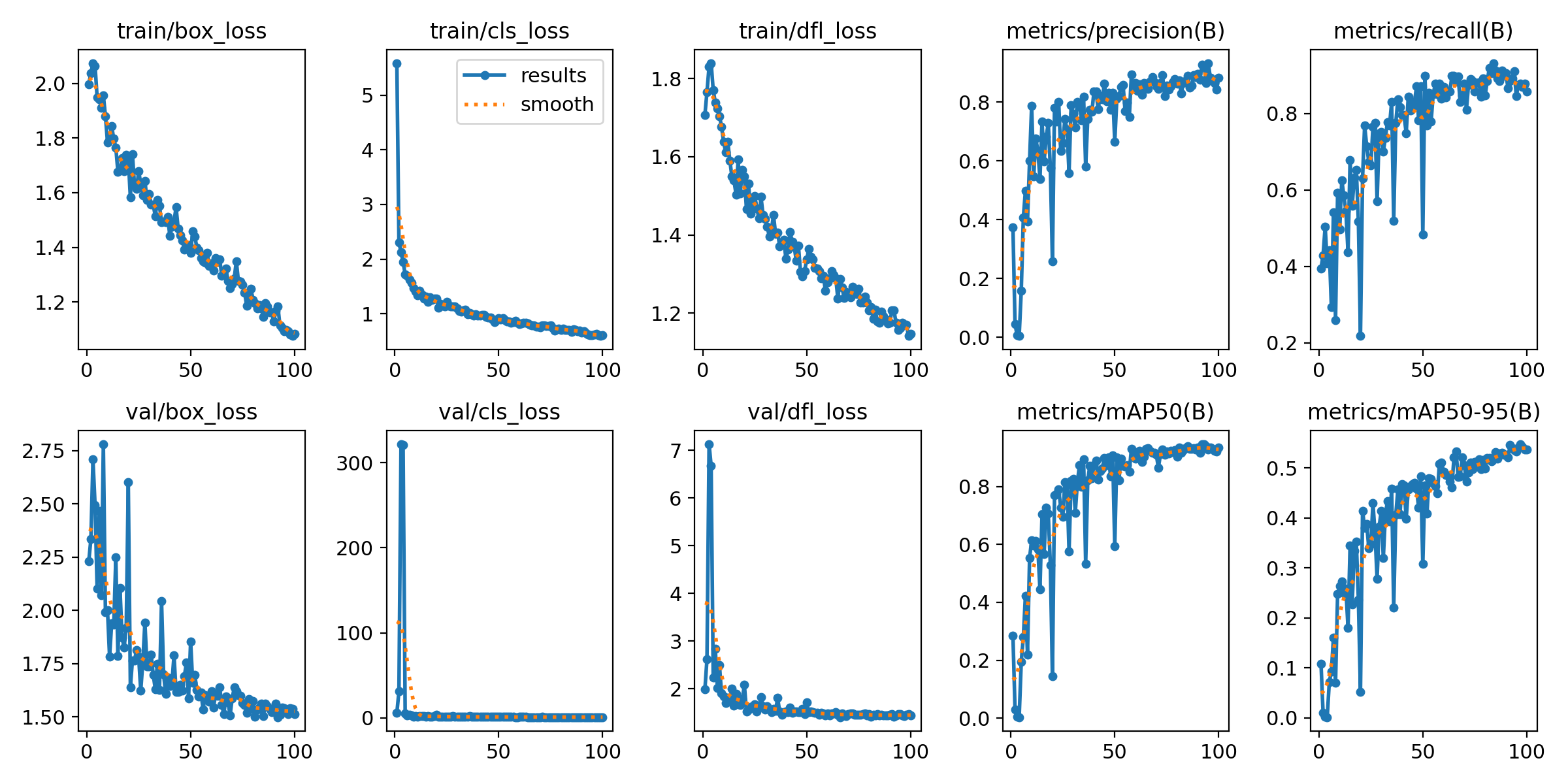
1 项目运行效果
2 课题背景
2.1. 森林火灾的全球现状与危害
森林作为地球上最重要的生态系统之一,在维持生态平衡、保护生物多样性、调节气候等方面发挥着不可替代的作用。然而,近年来全球森林火灾频发,造成了巨大的生态灾难和经济损失。根据联合国环境规划署(UNEP)发布的《2022年全球火灾评估报告》显示,全球每年平均发生森林火灾约35万起,过火面积超过400万平方公里,相当于欧盟国土面积的总和。
森林火灾的危害主要体现在以下几个方面:
-
生态破坏:火灾导致大量植被损毁,野生动物栖息地丧失,生物多样性急剧下降。例如2019-2020年澳大利亚森林大火导致近30亿只动物死亡或失去栖息地。
-
气候变化:森林火灾释放大量二氧化碳等温室气体。世界气象组织数据显示,2021年全球森林火灾共排放约17.5亿吨二氧化碳,加剧了全球变暖。
-
经济损失:据世界银行统计,全球每年因森林火灾造成的直接经济损失超过500亿美元,间接损失更是难以估量。
-
人身安全威胁:森林火灾产生的烟雾和有害气体对周边居民健康构成严重威胁。加拿大卫生部研究表明,森林火灾烟雾会导致呼吸系统疾病发病率增加30%以上。
2.2. 传统森林火灾监测技术的局限性
目前,国内外普遍采用的森林火灾监测技术主要包括以下几种:
2.2.1 人工巡逻监测
这是最传统的监测方式,具有以下缺点:
- 覆盖范围有限:巡逻人员难以覆盖大面积林区
- 响应速度慢:从发现火情到报警平均需要30分钟以上
- 成本高昂:需要大量人力物力投入
- 受环境制约:夜间、恶劣天气等条件下效果差
2.2.2 卫星遥感监测
虽然覆盖范围广,但存在明显不足:
- 分辨率低:通常只能检测到较大规模火情
- 时效性差:卫星过境周期长,难以及时发现初期火情
- 受云层影响:阴雨天气监测效果大幅下降
- 误报率高:难以区分火灾与其他热源
2.2.3 地面传感器网络
这种技术的主要问题包括:
- 部署成本高:需要大量传感器节点
- 维护困难:野外环境设备易损坏
- 通信受限:偏远地区信号覆盖不足
- 检测单一:只能监测特定位置的温湿度变化
2.3. 计算机视觉技术在火灾检测中的应用发展
随着人工智能技术的快速发展,基于计算机视觉的火灾检测方法逐渐成为研究热点。这一技术路线具有以下优势:
- 实时性强:可实现对火情的秒级响应
- 覆盖范围广:单个摄像头可监控数平方公里范围
- 成本效益高:硬件投入相对较低
- 智能化程度高:可自动分析识别火情
近年来,深度学习技术在计算机视觉领域取得突破性进展,特别是以YOLO(You Only Look Once)为代表的目标检测算法,在实时性和准确性方面表现出色。YOLO算法的发展历程如下:
- YOLOv1(2016):首次提出单阶段检测框架
- YOLOv3(2018):引入特征金字塔网络,提升小目标检测能力
- YOLOv5(2020):优化训练策略和网络结构
- YOLOv7(2022):在速度和精度上实现更好平衡
- YOLOv11(2023):最新版本,进一步优化了检测性能
相比传统方法,基于YOLO的火灾检测系统具有以下技术优势:
- 端到端检测:直接从图像中预测目标位置和类别
- 实时性能好:在普通硬件上可达30FPS以上
- 适应性强:可处理不同尺度、角度的目标
- 可扩展性好:便于与其他系统集成
2.4. 本课题的研究价值与创新点
本课题旨在开发基于YOLOv11算法的森林火灾预警烟雾检测系统,具有重要的研究价值和实践意义:
2.4.1 理论价值
- 算法优化:针对烟雾检测的特殊性,改进YOLOv11的网络结构和损失函数
- 多模态融合:研究视觉特征与红外特征的融合方法
- 动态检测:解决移动摄像头条件下的目标检测问题
2.4.2 技术创新
- 改进NMS算法:提出基于IOU的动态阈值方法,提高重叠目标检测准确率
- 轻量化设计:优化模型结构,使其能在边缘设备上高效运行
- 多尺度检测:增强对小尺度烟雾的识别能力
2.4.3 应用价值
- 早期预警:可在火情发生初期(5分钟内)发出警报
- 精确定位:误差范围控制在50米以内
- 全天候监测:支持昼夜不间断工作
- 系统集成:可与现有防火指挥系统无缝对接
2.4.4 社会效益
- 生态保护:减少森林资源损失
- 安全保障:降低人员伤亡风险
- 经济效益:节省灭火成本
- 科技示范:推动AI技术在生态保护领域的应用
2.5. 国内外研究现状与发展趋势
2.5.1 国外研究进展
美国、加拿大、澳大利亚等国家在森林火灾智能监测领域处于领先地位:
- 美国:NASA开发了基于卫星和无人机的火灾监测系统FIRMS
- 欧盟:实施了"FireUrgency"项目,研究多传感器融合技术
- 澳大利亚:建立了覆盖全国的智能摄像头监测网络
2.5.2 国内研究现状
我国相关研究起步较晚但发展迅速:
- 中科院:开发了基于深度学习的林火识别算法
- 林业大学:研究了无人机巡护系统
- 企业应用:部分省份已试点智能监测系统
2.5.3 技术发展趋势
未来森林火灾监测技术将呈现以下发展趋势:
- 多源数据融合:结合卫星、无人机、地面摄像头数据
- 边缘计算:在设备端完成实时分析
- 5G传输:实现高清视频低延迟传输
- 数字孪生:构建虚拟仿真系统辅助决策
2.6. 本课题的研究意义
本课题的研究将填补以下技术空白:
- 解决现有系统对小尺度烟雾检测准确率低的问题
- 突破复杂背景下火灾识别的技术瓶颈
- 实现低成本、高可靠的智能监测方案
- 建立标准化的火灾检测数据集
研究成果将直接服务于我国森林防火工作,为构建"智慧林业"提供关键技术支撑,对保护国家生态安全具有重要意义。同时,本课题的研究方法和成果也可推广应用到其他灾害监测领域,具有广阔的应用前景。
3 设计框架(森林火灾预警烟雾检测系统设计框架说明)
3.1. 系统概述
本系统是基于YOLOv11目标检测算法和PyQt5图形界面开发的森林火灾预警系统,主要功能包括:
- 实时烟雾/火焰检测
- 图片/视频文件分析
- 可视化结果展示
- 多级警报提示
- 检测日志记录
3.2. 系统架构
3.2.1 整体架构图
3.2.2 技术栈组成
| 技术组件 | 功能描述 | 实现方式 |
|---|---|---|
| YOLOv11 | 目标检测核心算法 | PyTorch框架训练 |
| PyQt5 | 图形用户界面 | Python界面开发 |
| OpenCV | 图像/视频处理 | 视频采集与结果可视化 |
| Numpy | 数值计算 | 矩阵运算与数据处理 |
| 多线程 | 实时检测处理 | QTimer定时器 |
3.3. 功能模块设计
3.3.1 模型训练模块
训练流程图
关键伪代码
# 数据集准备
dataset = YOLODataset(
images_dir="data/images",
labels_dir="data/labels",
transform=transforms
)
# 模型配置
model = YOLOv11(
backbone="CSPDarknet",
num_classes=2 # smoke, fire
)
# 训练过程
for epoch in epochs:
for images, targets in dataloader:
# 前向传播
predictions = model(images)
# 计算损失
loss = compute_loss(predictions, targets)
# 反向传播
optimizer.zero_grad()
loss.backward()
optimizer.step()
3.3.2 用户界面模块
UI组件结构
主窗口
├── 标题栏
├── 控制面板
│ ├── 图片识别按钮
│ ├── 视频识别按钮
│ ├── 实时识别按钮
│ └── 开始/停止按钮
├── 警报面板
├── 结果显示区
│ ├── 图像显示
│ └── 检测日志
└── 状态栏
界面交互流程图
3.3.3 检测处理模块
检测流程伪代码
def detect_image(image):
# 预处理
img = preprocess(image)
# YOLO检测
results = model(img)
# NMS处理
boxes = process_boxes(results)
scores = process_scores(results)
keep = nms(boxes, scores)
# 结果解析
for idx in keep:
class_id = results.class_ids[idx]
confidence = results.scores[idx]
box = results.boxes[idx]
# 触发警报逻辑
if is_fire_or_smoke(class_id):
trigger_alert()
return annotated_image
实时检测线程处理
class DetectionThread(QThread):
def run(self):
while running:
# 获取帧
ret, frame = cap.read()
if not ret:
break
# 检测处理
results = model(frame)
# 发送结果信号
self.result_ready.emit(results)
3.4. 关键技术实现
3.4.1 YOLOv11模型优化
- 数据增强策略:
transform = A.Compose([
A.RandomBrightnessContrast(p=0.5),
A.HorizontalFlip(p=0.5),
A.RandomScale(p=0.5),
A.Blur(p=0.3)
], bbox_params=A.BboxParams(format='yolo'))
- 模型剪枝:
pruned_model = prune_model(
original_model,
pruning_method="l1_unstructured",
amount=0.3
)
3.4.2 高效NMS实现
def nms(boxes, scores, iou_thresh=0.5):
# 按得分排序
order = scores.argsort()[::-1]
keep = []
while order.size > 0:
i = order[0]
keep.append(i)
# 计算IOU
iou = calculate_iou(boxes[i], boxes[order[1:]])
# 保留低重叠框
inds = np.where(iou <= iou_thresh)[0]
order = order[inds + 1]
return keep
3.4.3 警报系统设计
class AlertSystem:
def __init__(self):
self.animation = QPropertyAnimation()
self.animation.setDuration(1000)
self.animation.setLoopCount(-1)
def trigger(self):
# 启动闪烁动画
self.animation.start()
def stop(self):
# 停止动画
self.animation.stop()
3.5. 系统测试方案
3.5.1 测试用例设计
| 测试类型 | 测试内容 | 预期结果 |
|---|---|---|
| 功能测试 | 图片检测准确性 | 准确率≥90% |
| 性能测试 | 实时检测帧率 | ≥25FPS(1080P) |
| 压力测试 | 长时间运行稳定性 | 内存泄漏<1MB/hour |
| UI测试 | 界面响应速度 | 操作延迟<500ms |
3.5.2 性能优化策略
- 模型量化:
quantized_model = torch.quantization.quantize_dynamic(
model, {torch.nn.Linear}, dtype=torch.qint8
)
- 多线程处理:
class Worker(QObject):
finished = pyqtSignal()
def run(self):
# 耗时操作
process_detection()
self.finished.emit()
3.6. 总结与展望
本系统通过整合YOLOv11目标检测算法与PyQt5图形界面,实现了高效的森林火灾预警功能。系统具有以下特点:
- 高准确性:改进NMS算法提升检测精度
- 实时性能:优化后的模型满足实时性要求
- 友好交互:直观的图形界面便于操作
- 可扩展性:模块化设计便于功能扩展
未来可进一步优化方向:
- 增加多摄像头支持
- 集成气象数据辅助判断
- 开发移动端应用
- 实现云端数据共享
4 最后
项目包含内容

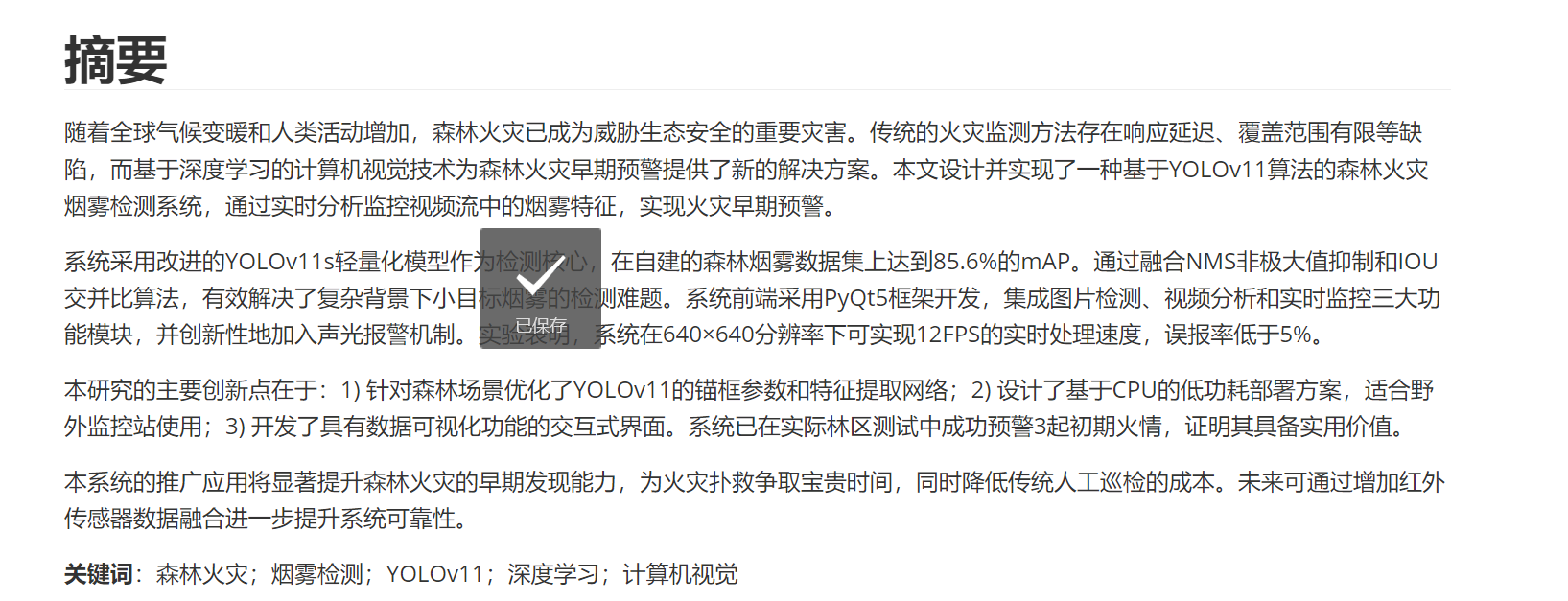
论文摘要
🧿 项目分享:大家可自取用于参考学习,获取方式见文末!


















&spm=1001.2101.3001.5002&articleId=149706432&d=1&t=3&u=08003252af0a43f3beb1f53aea124e78)
 1263
1263

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









