







作业内容:
给定一个点 P=(2,1), 将该点绕原点先逆时针旋转 45◦,再平移 (1,2), 计算出变换后点的坐标(要求用齐次坐标进行计算)。
C++代码:
#include <iostream>
#include <cmath>
#include <eigen3/Eigen/Core>
#include <eigen3/Eigen/Dense>
// 定义一个命名空间
using namespace std;
// 定义一个函数用于将角度转换为弧度,这里的类型要和p一致
double deg2rad(double degress)
{
return degress * M_PI / 180.0;
}
int main()
{
// 定义点p的齐次坐标,p为double双精度浮点型
Eigen::Vector3d p(2.0f, 1.0f, 1.0f);
// 定义旋转矩阵
double theta = deg2rad(45);
Eigen::Matrix3d rotationMatrix;
rotationMatrix << cos(theta), -sin(theta), 0,
sin(theta), cos(theta), 0,
0, 0, 1;
// 定义平移矩阵
Eigen::Matrix3d translationMatrix;
translationMatrix << 1, 0, 1,
0, 1, 2,
0, 0, 1;
// 应用旋转矩阵
Eigen::Vector3d rotatedP = rotationMatrix * p;
// 应用平移矩阵,注意这里是在旋转后的点基础上进行平移
Eigen::Vector3d transformedP = translationMatrix * rotatedP;
// 输出结果p'
cout << "p':" << transformedP.transpose() << endl;
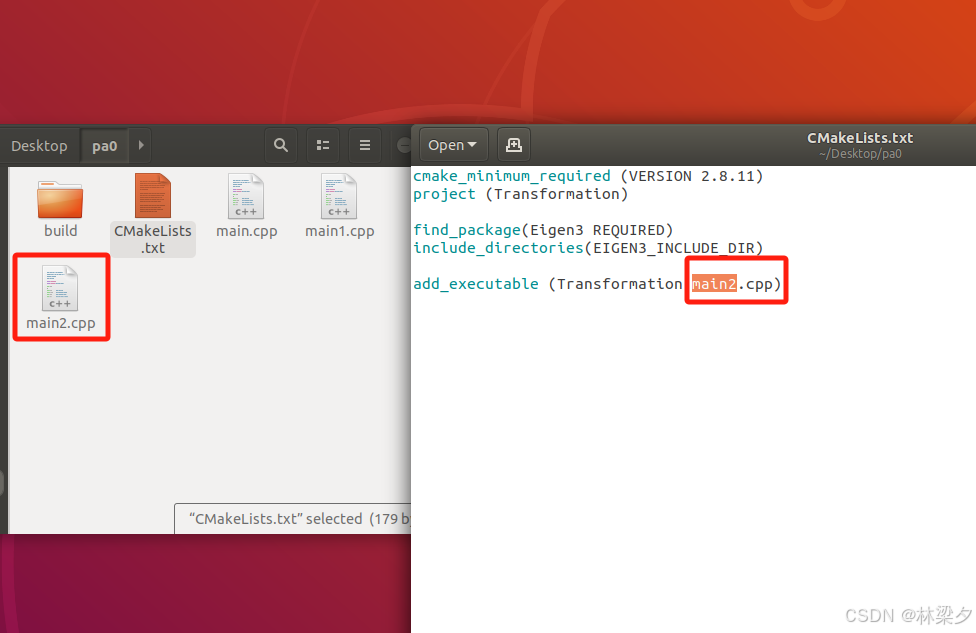
}文件结构:
这里我代码命名为main2.app,所以CMakeLists.txt文件下也要改成main2.cpp。
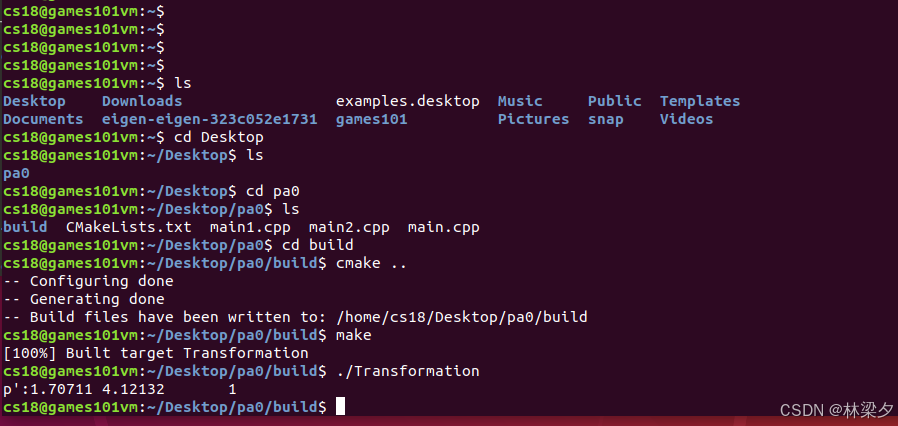
终端运行结果:
- Ctrl + Alt + T 打开终端
- cd 进入到cpp文件所在路径
- mkdir build 在该路径下新建build文件夹
- cd build 进入build文件夹
- cmake .. 上级目录
- make 编译
- ./Transformation 运行程序

















 588
588

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









