




车载毫米波雷达的一帧处理过程主要为:MCU控制RF开始TX发FMCW波形 -> DSP接收一帧中每个chirp的ADC数据 -> DSP经过信号处理算法进行测距测速测角初步测算目标 -> 解速度模糊 -> 将DSP计算目标列表结果发至MCU进行融合处理 -> 跟踪算法数据处理 -> CAN/CANFD发送目标点数据。其中在AWR1843芯片平台中,SDK里的MSS即指MCU核子系统,DSS指DSP核子系统。
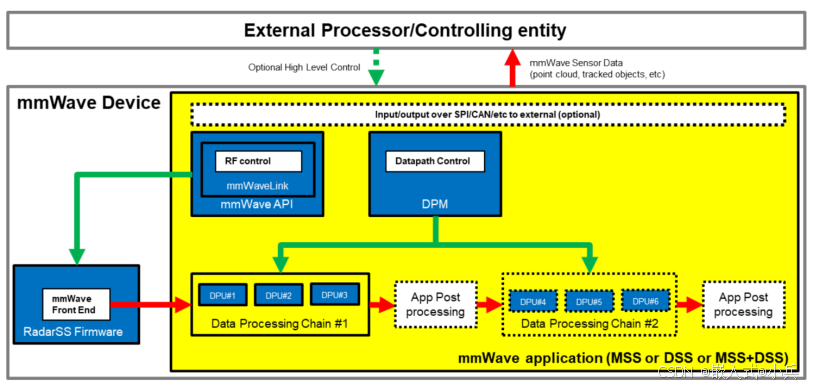
2. MSS和DSS的交互流程
MSS和DSS均运行DPM模块,模式为DPM_Domain_REMOTE,MSS和DSS双核间的IPC通信为虚拟pipe和mailbox。
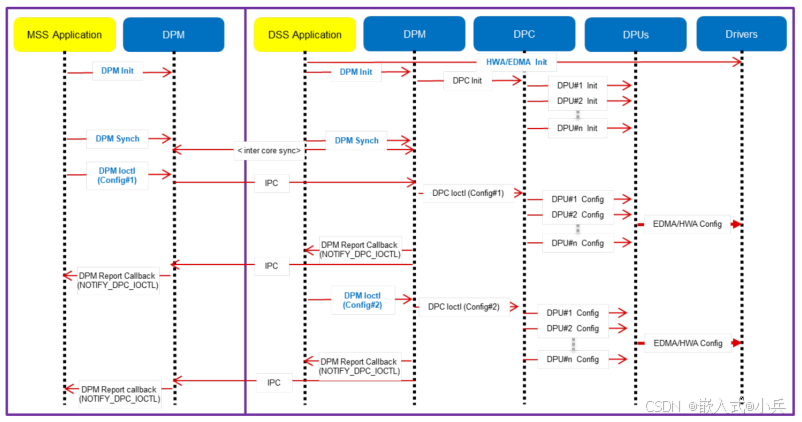
(1)MSS通过的ioctl配置部分参数至DSS,MSS通过DPM与DSS交互的主要函数流程为:
Mmw_dataPathConfig() -> DPM_ioctl(), DPM_MessageId_DPC_CFG -> DPM_pipeSend() -> SemaphoreP_post (ptrDPM->semaphoreHandle) -> DPM_execute() -> DPM_msgRecv() -> gDPMMessageFxnTable[3], DPM_msgDPCCfgHandler() -> DPM_msgPostProcess() -> DPM_pipeSend() -> DPM_mboxMsgSend() 通过
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 901
901

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









