







 本文从向量旋转的基本公式出发,逐步引导读者理解旋转如何通过矩阵实现。文中详细介绍了向量旋转的数学原理,并进一步解释了矩阵的概念及其在几何变换中的作用。
本文从向量旋转的基本公式出发,逐步引导读者理解旋转如何通过矩阵实现。文中详细介绍了向量旋转的数学原理,并进一步解释了矩阵的概念及其在几何变换中的作用。
首先,截图是从该博主视频截图来的
欧拉角,矩阵,四元数,万向节死锁_哔哩哔哩_bilibili
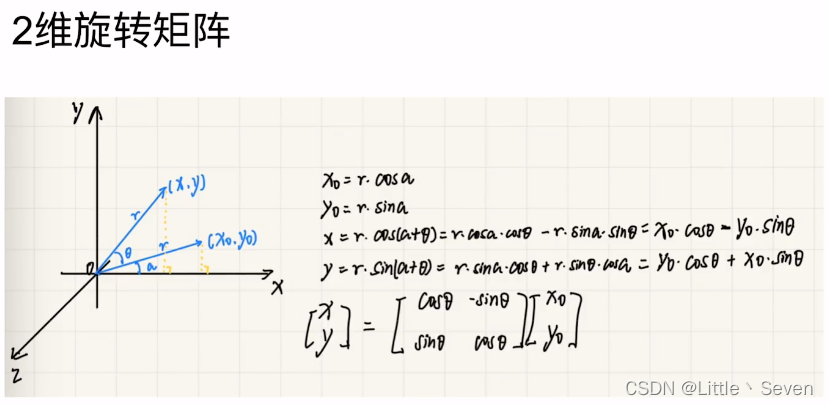
r长度的向量(x0,y0),旋转θ角度后变为(x,y)
x0 = r * cos α
x0 = r * sin α
x = r * cos(α + θ) = r * cos(α) * cos (θ) - r * sin(α) * sin(θ) = x0 * cos(θ) - y0 * sin(θ)
y = r * sin(α + θ) = r * sin(α) * cos (θ) + r * sin(θ) * sin(α) = y0 * cos(θ) + x0 * sin(θ)
求解x0和y0坐标比较好理解,x和y的坐标用到了高中的知识,看下图
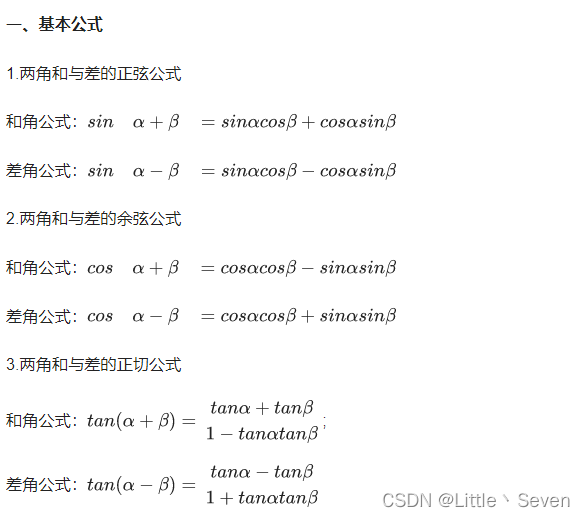
简单解释一下x = x0 * cos(θ) - y0 * sin(θ)如何获得,由于x0 = r * cos α
x = r * cos(α) * cos (θ) - r * sin(α) * sin(θ),公式里恰好有r * cos α,因此把x0替换进去,得到最终结果,巧妙的是本来有一个α未知变量,公式变换后全是已知变量
上面是向量旋转的数学公式推导,下面开始引入矩阵概念。
理解矩阵的几何功能
- 矩阵是一种线性变换(线段变换后仍是线段,并且原点不会改变)
- 矩阵是一种映射,映射可以是一对一,也可以是一对多
- 矩阵是一种空间变换,每一种矩阵都是有本身的几何意义,而不是单纯的数字组合
了解了矩阵的几何功能后,再来看矩阵和旋转的联系,旋转是一种线性变换,因此当然可以用矩阵表示旋转。


















 4282
4282

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











