







【人工智能全栈学习-计算机视觉】Yolo系列(看完就全懂了)
本系列文章不可转载!!!
一、问题
| 本章问题导读,如果面试前以下题目还有不会的建议看本篇文章 |
|---|
| 1.什么是YOLO,解释YOLO v1的三十个维度 |
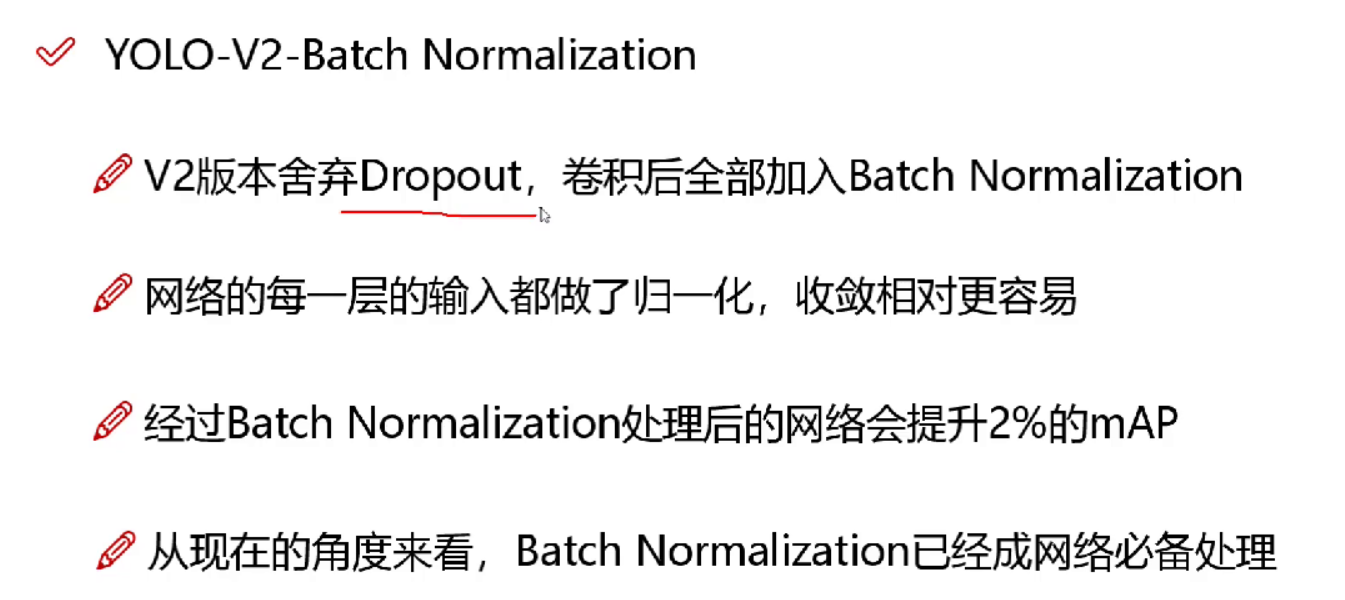
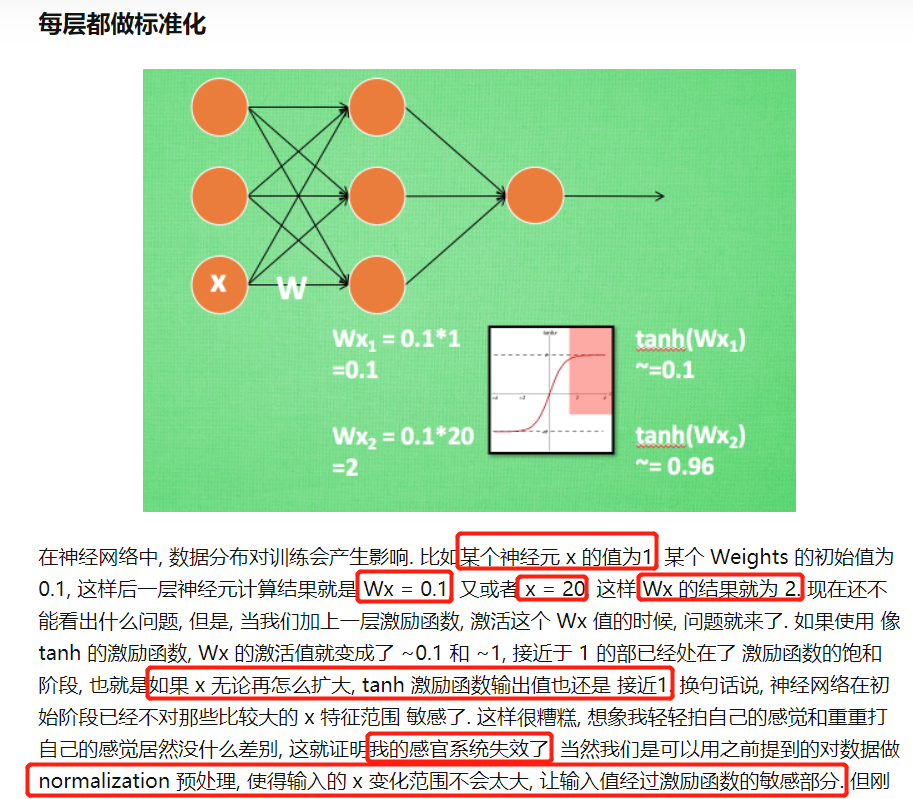
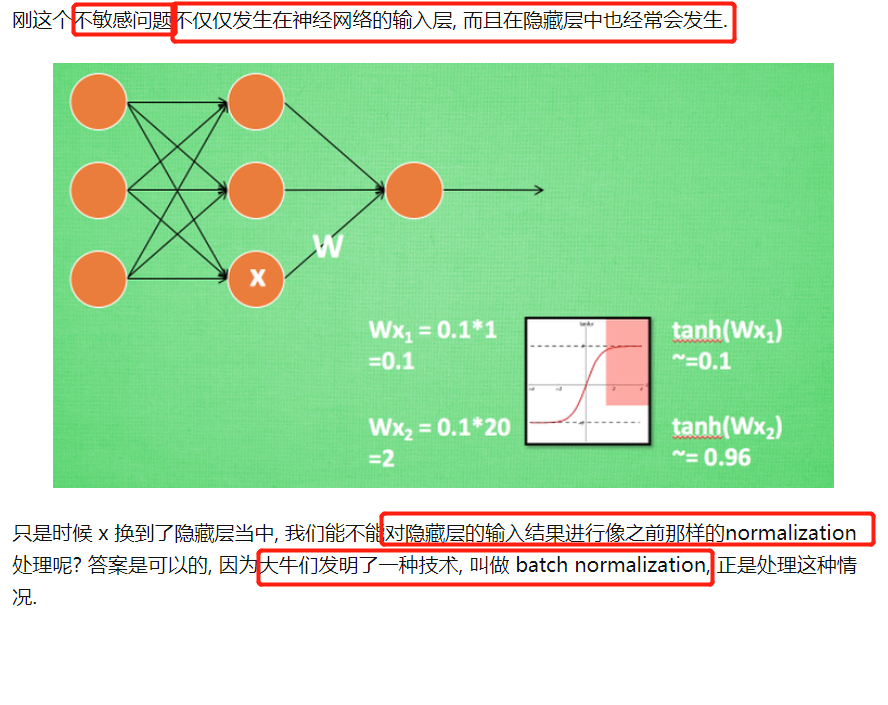
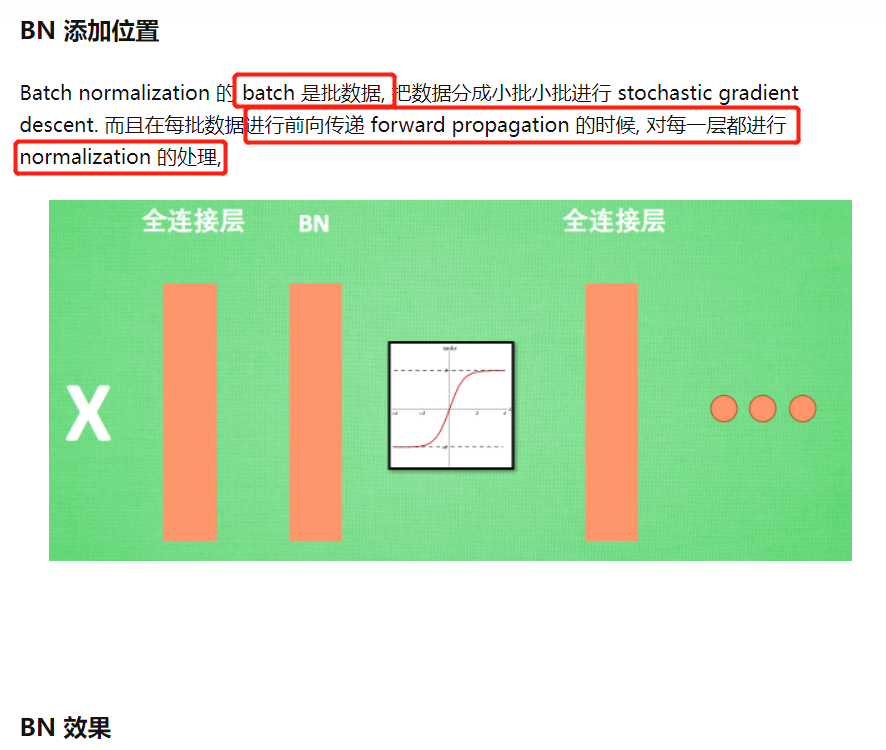
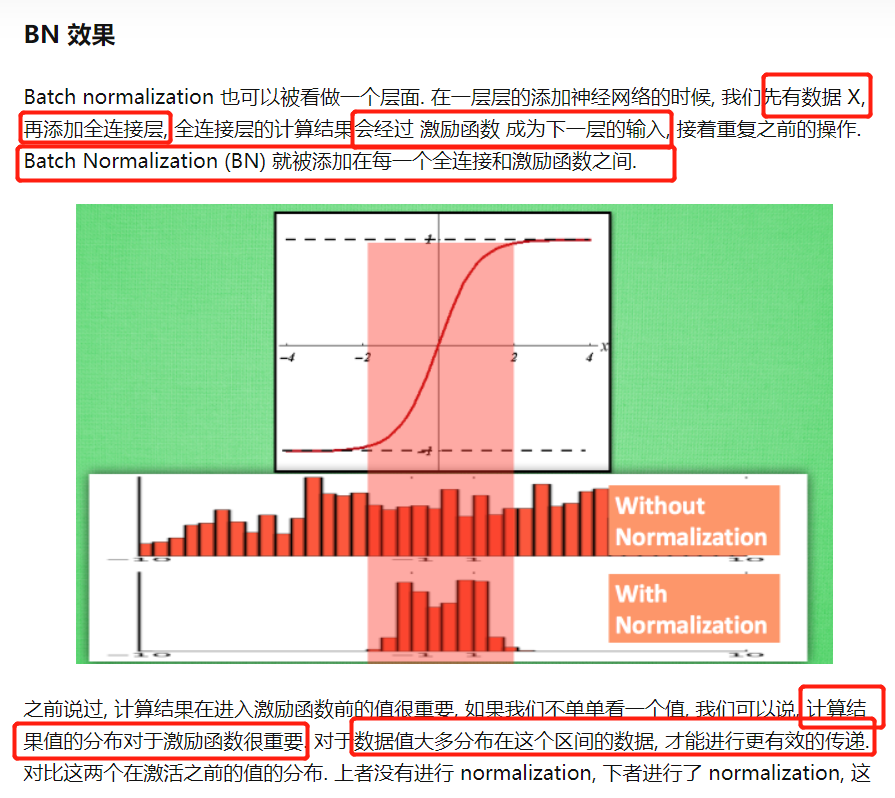
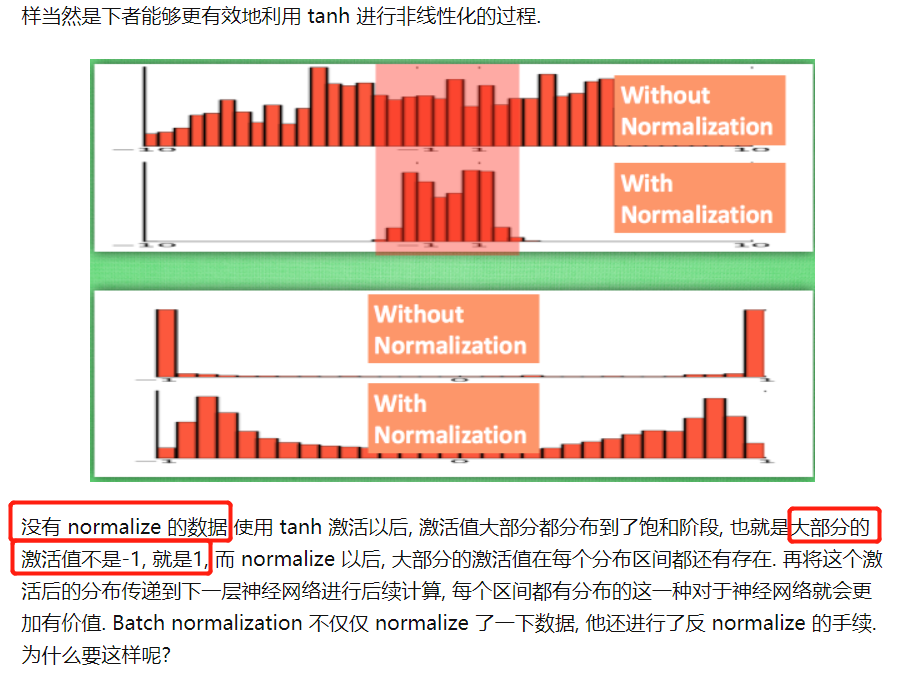
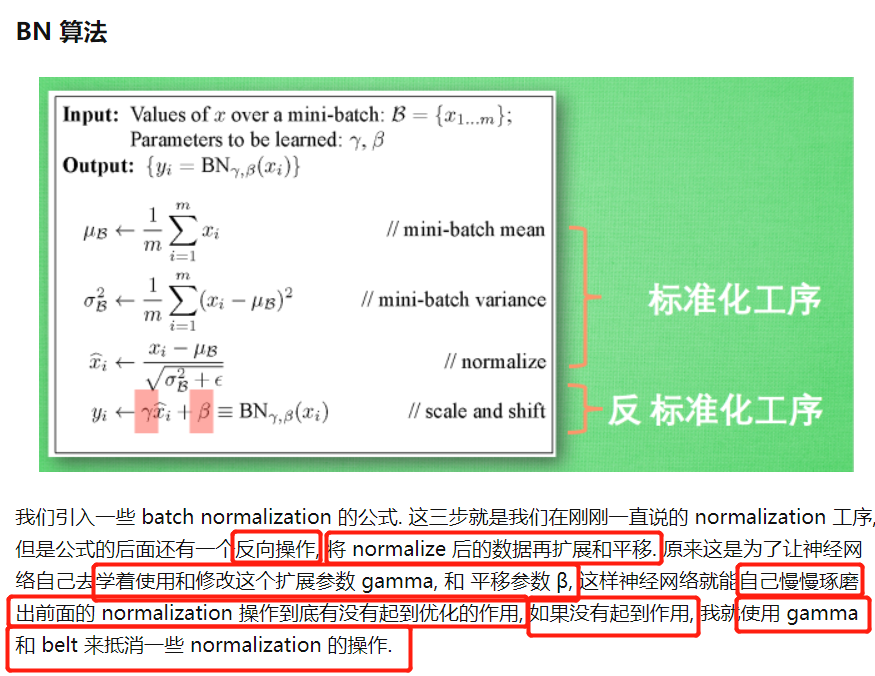
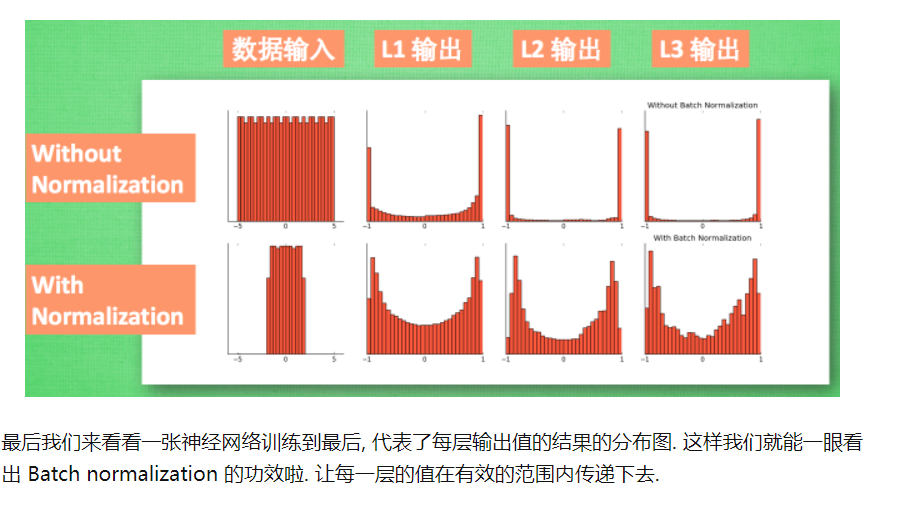
| 2.什么是YOLO V2,解释Batch Normalization,并阐述其作用 |
二、人工智能全栈学习系列课程
【人工智能全栈学习】机器学习基础知识——线性回归与逻辑回归(看完就全懂了)
【人工智能全栈学习】机器学习基础知识——传统机器学习(看完就全懂了)
【人工智能全栈学习】机器学习基础知识——分类器和机器学习三大定律(看完就全懂了)
【人工智能全栈学习-情感分析】BiLSTM(看完就全懂了)
【人工智能全栈学习-情感分析】Bert(看完就全懂了)
【人工智能全栈学习-知识图谱】零基础实践——动手学关系抽取
【人工智能全栈学习-知识图谱】零基础理论——动手学关系抽取:TextCNN&LSTM
【人工智能全栈学习-计算机视觉】Yolo系列(看完就全懂了)
【人工智能全栈学习-图像分割】语义分割和实例分割(看完就全懂了)
三、Yolo V1
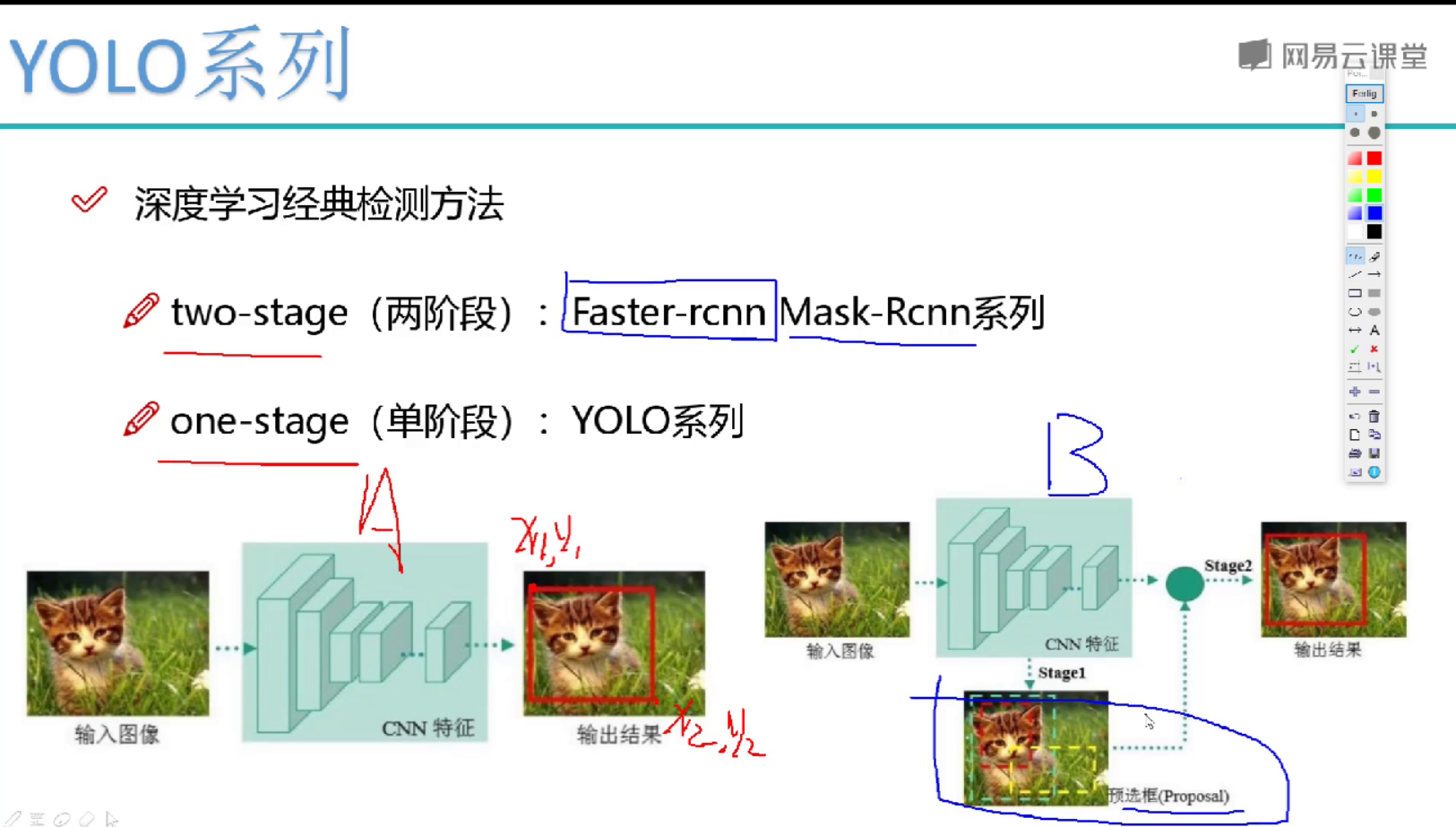
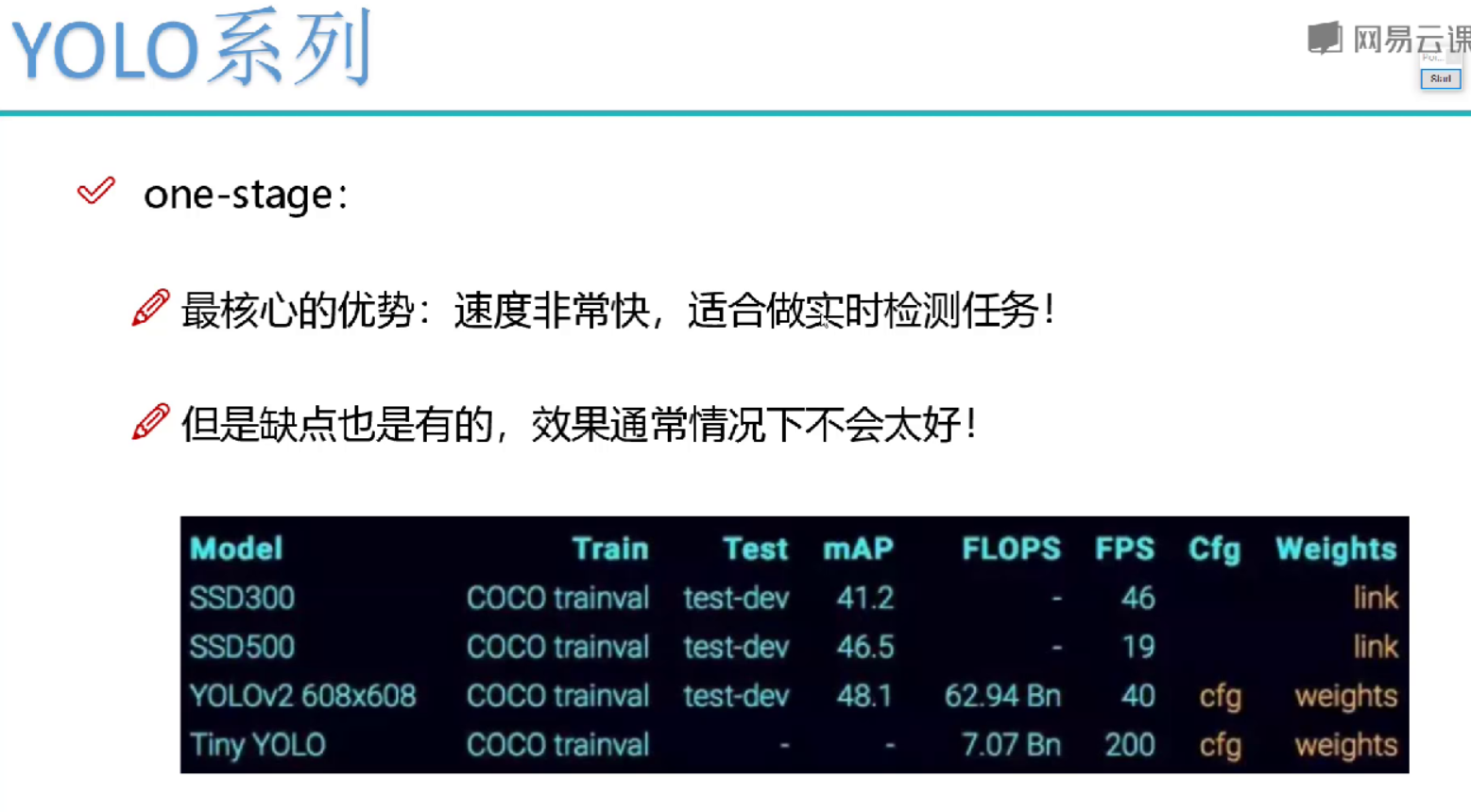
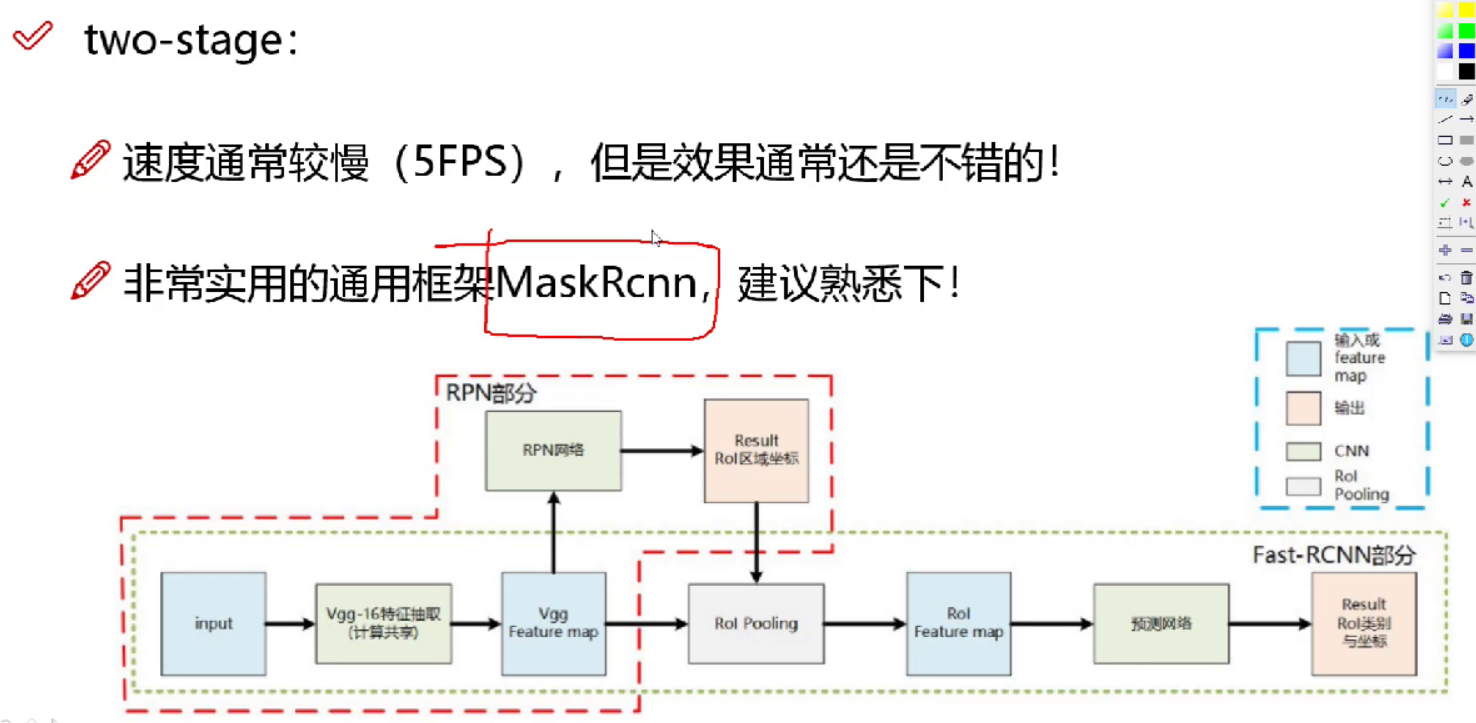
One-Stage and Two-Stage
map和IOU
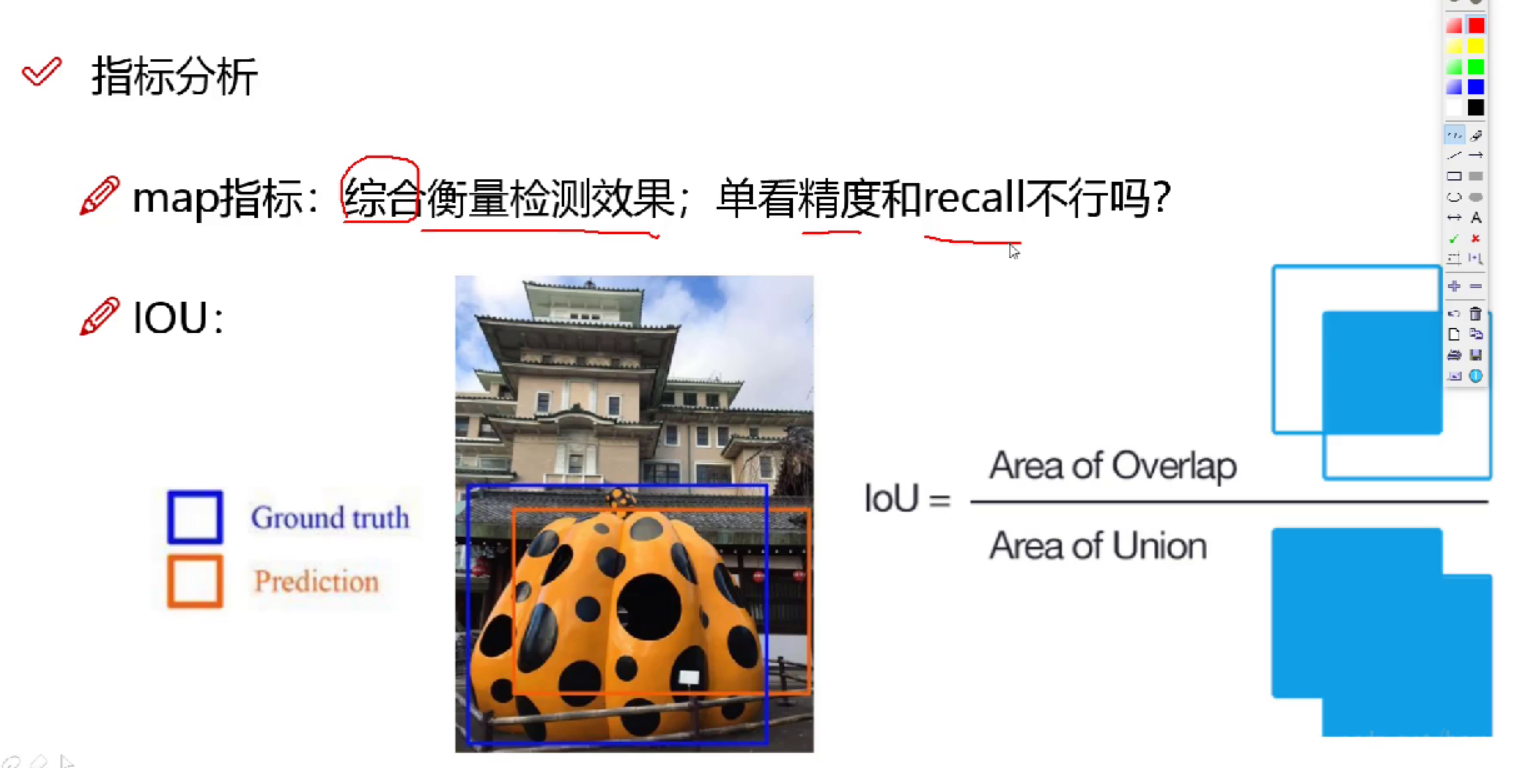
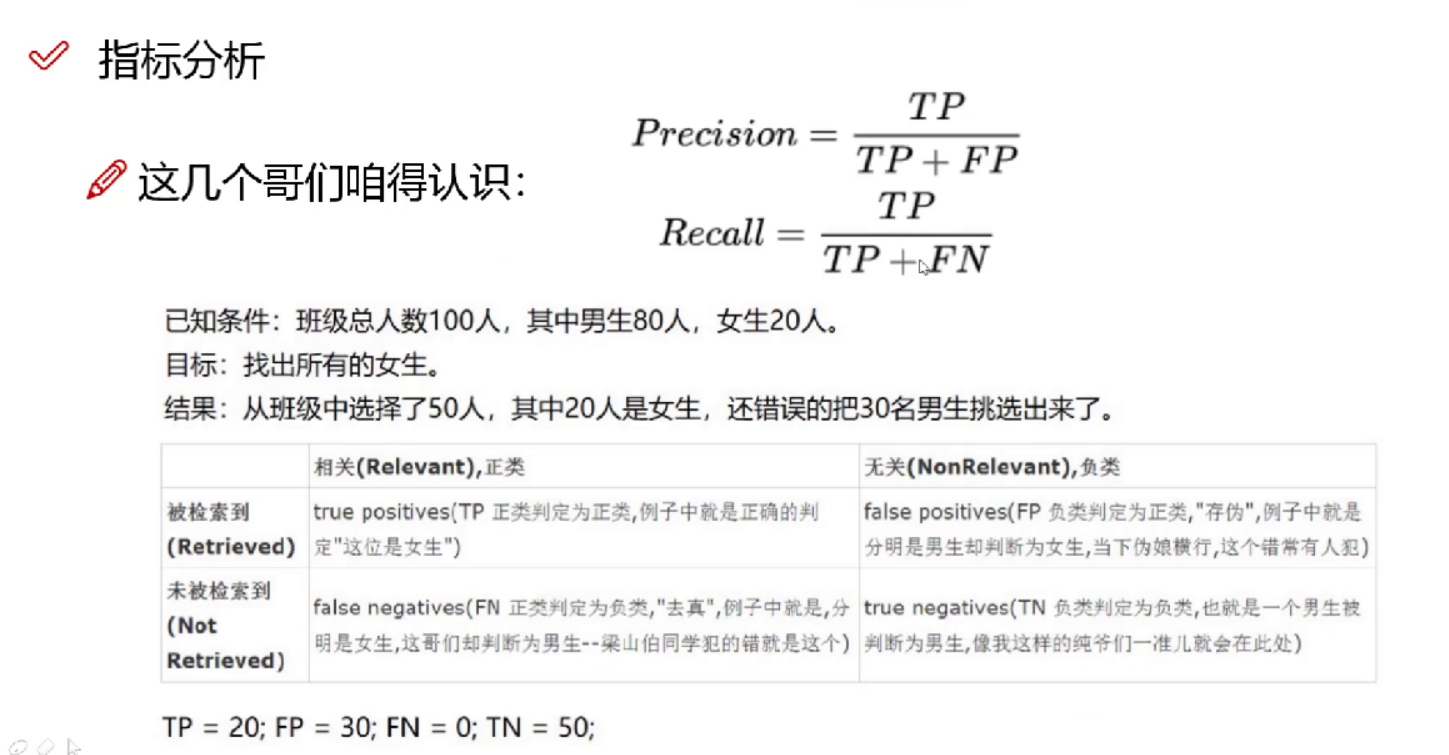
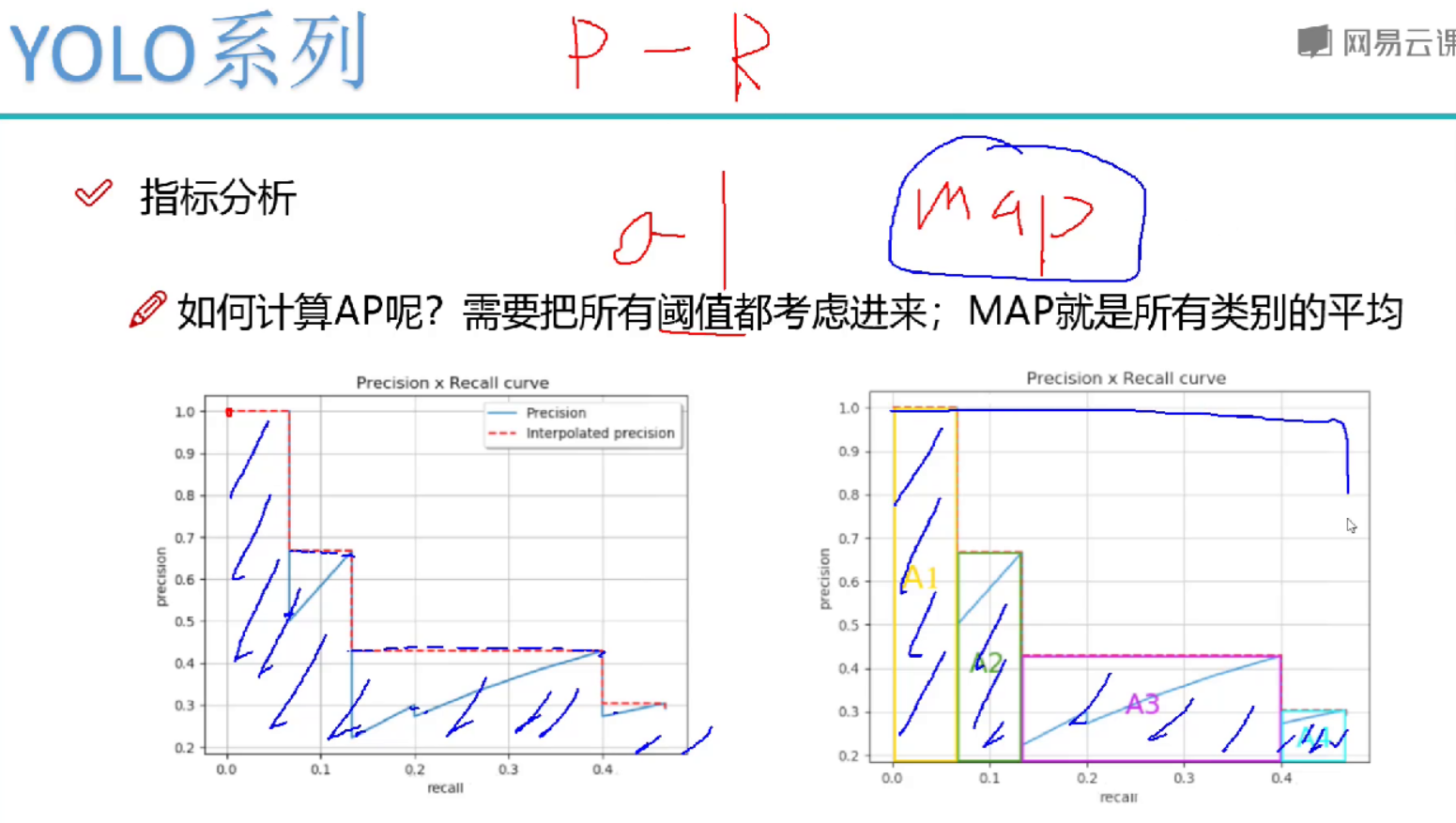
map是综合考虑precision和recall
Yolo V1
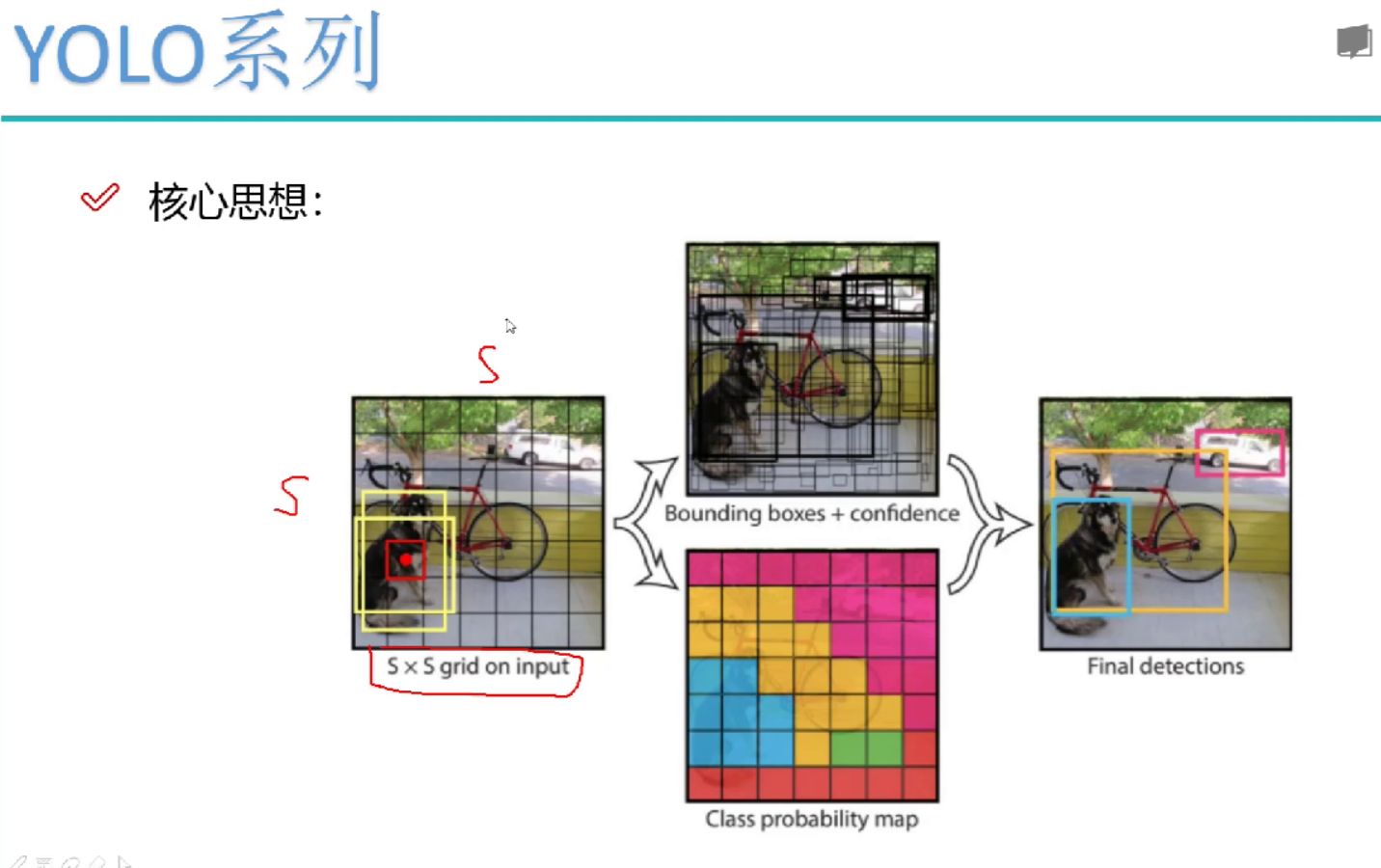
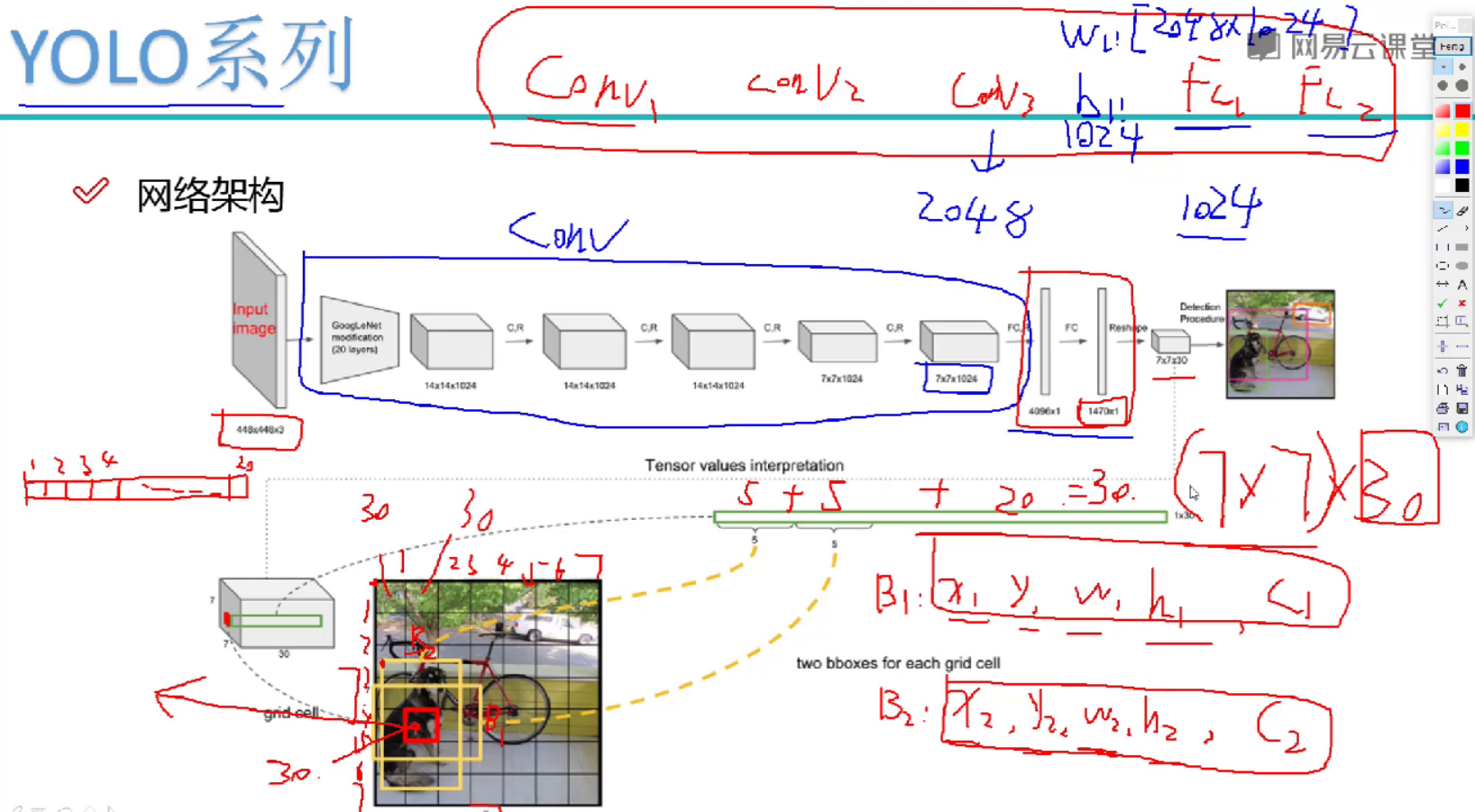
最终得到的结果是B1,B2两个预选框,每个框五个维度,
[
x
1
,
y
1
,
w
1
,
h
1
,
c
1
(
置
信
度
)
]
∗
2
+
20
(
20
个
种
类
的
概
率
)
=
30
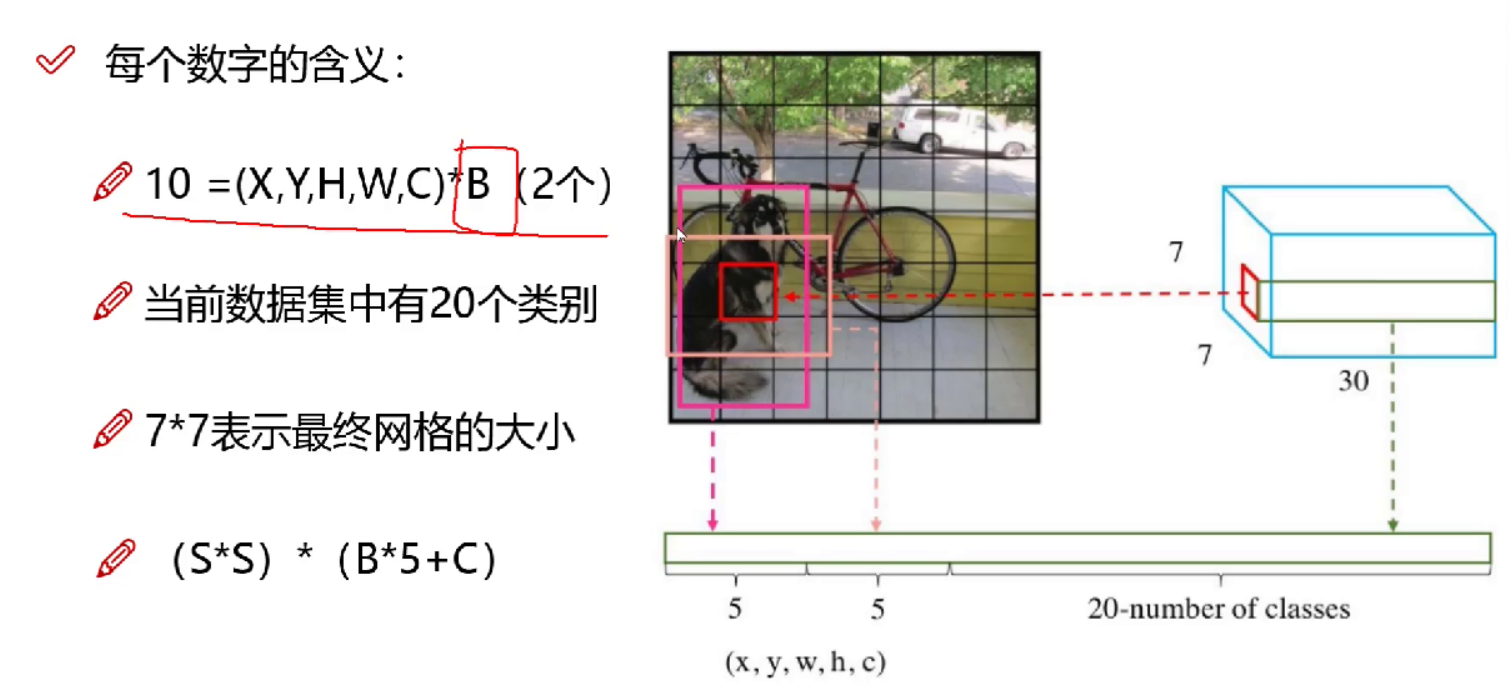
[x_1,y_1,w_1,h_1,c_1(置信度)]*2+20(20个种类的概率)=30
[x1,y1,w1,h1,c1(置信度)]∗2+20(20个种类的概率)=30
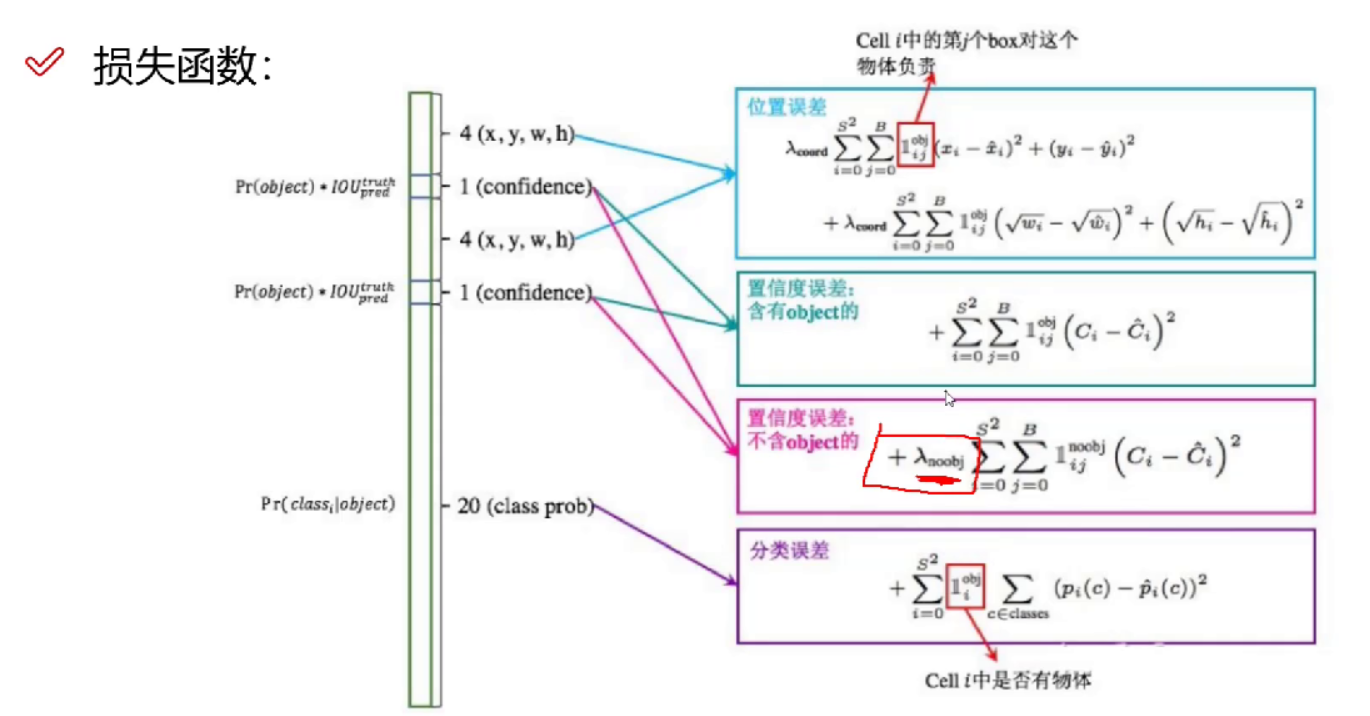
利用损失函数进行相应的训练。
位置误差
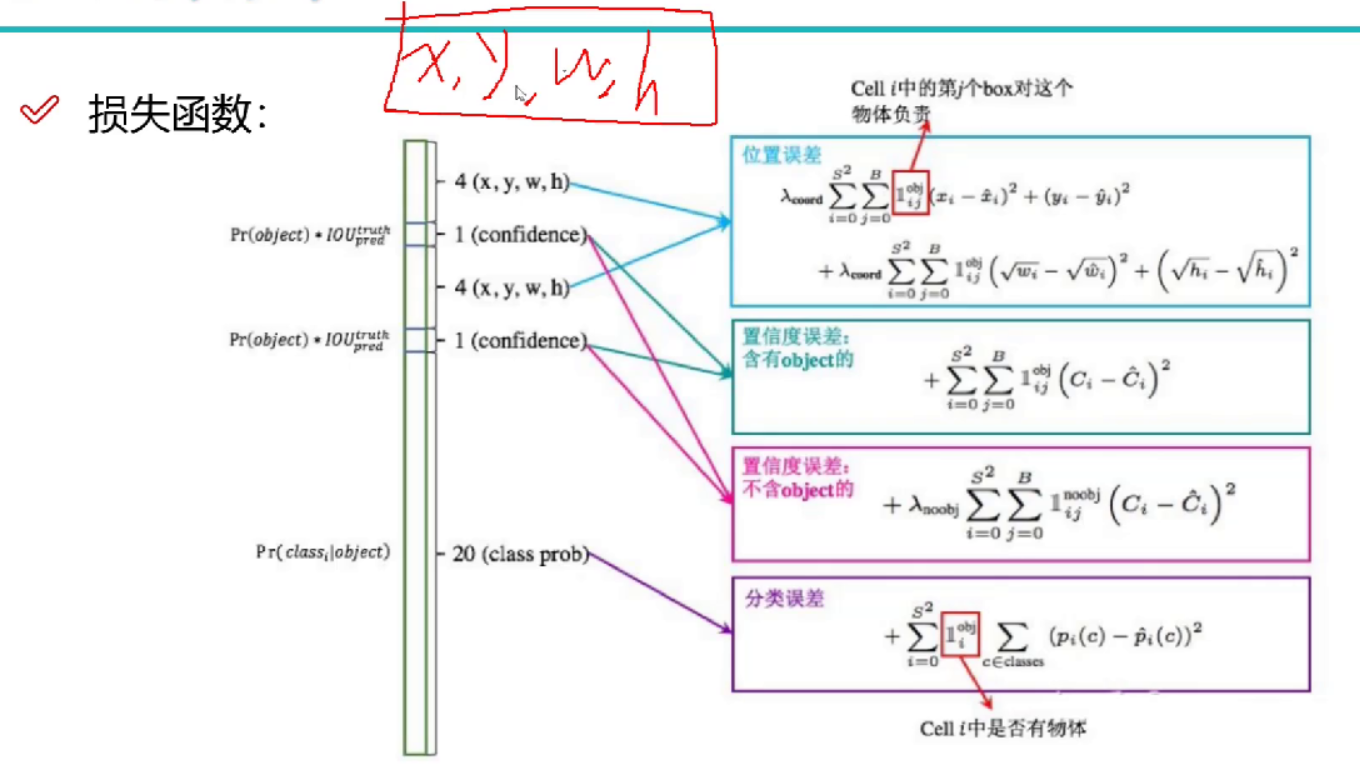
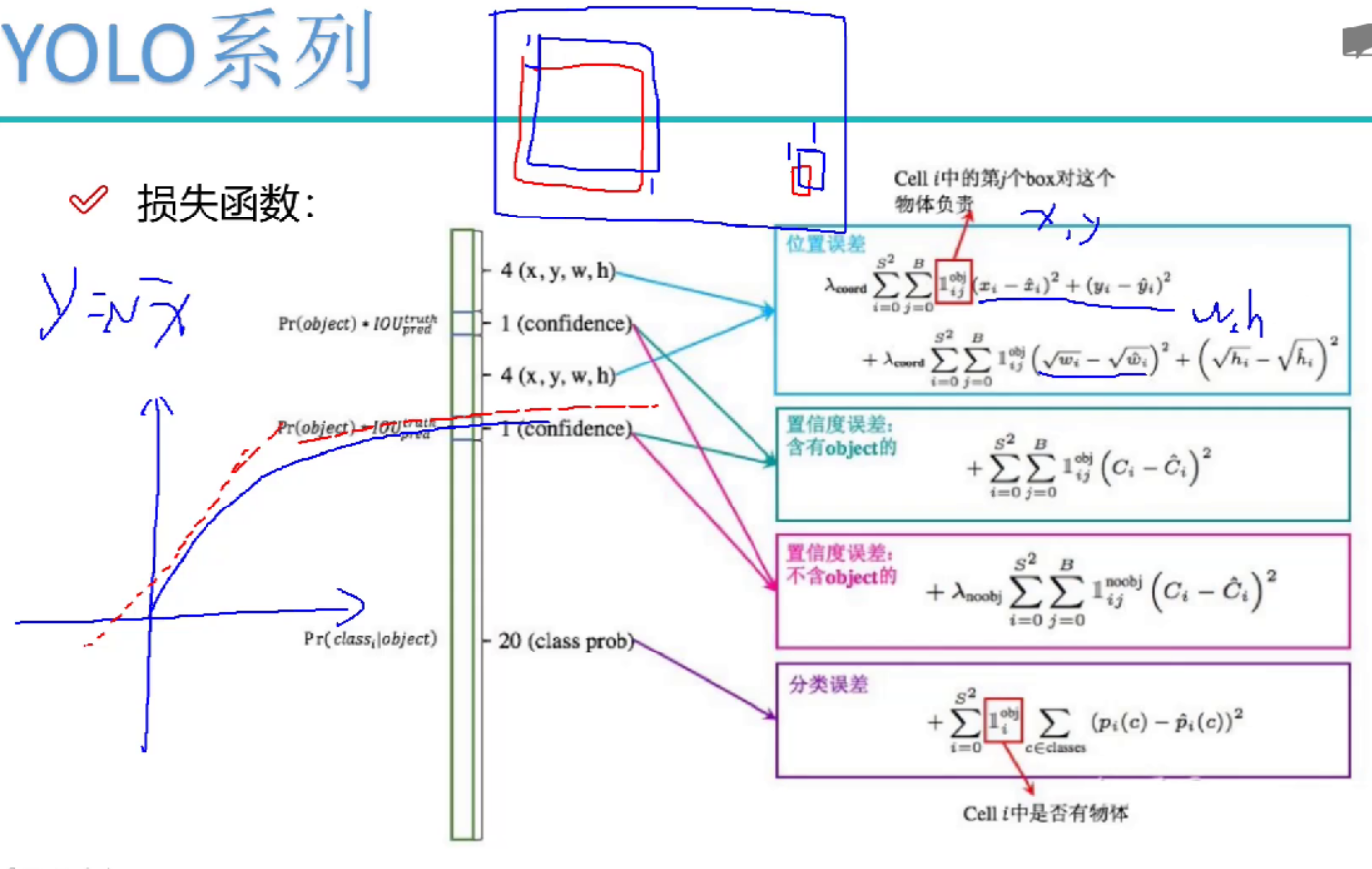
置信度
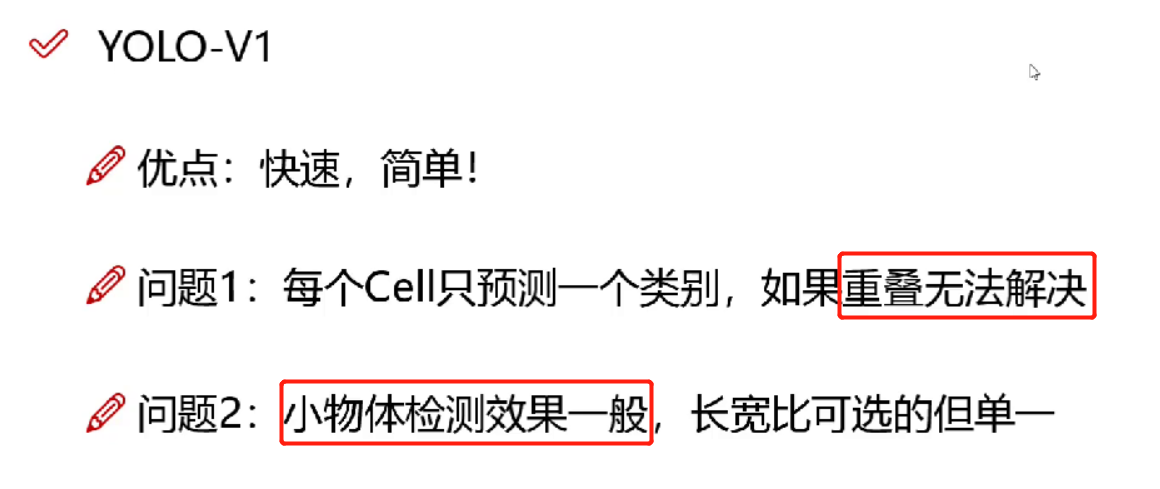
Yolo V1局限性
四、Yolo V2


















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











