








 超级会员免费看
超级会员免费看

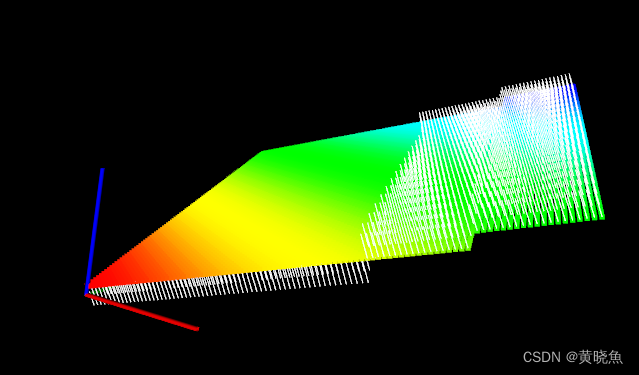
确定后,查询点的相邻点可用于估计局部要素制图表达,该局部要素制图表达捕获查询点周围基础采样表面的几何。描述表面几何形状的一个重要问题是首先推断其在坐标系中的方向,即估计其法线。表面法线是表面的重要属性,在许多领域(如计算机图形应用)中大量使用,以应用正确的光源来生成阴影和其他视觉效果(有关更多信息,请参阅[RusuDissertation])。
以下代码片段将估计输入数据集中所有点的一组表面法线。
#include <pcl/point_types.h>
#include <pcl/features/normal_3d.h>
{
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud (new pcl::PointCloud<pcl::PointXYZ>);
... read, pass in or create a point cloud ...
// Create the normal estimation class, and pass the input dataset to it
pcl::NormalEstimation<pcl::PointXYZ, pcl::Normal> ne;
ne.setInputCloud (cloud);
// Create an empty kdtree representation, and pass it to the normal estimation object.
// Its content will be filled inside the object, based on the given input dataset (as no other search surface is given).
pcl::search::KdTree<pcl::PointXYZ>::Ptr tree (new pcl::search::KdTree<pcl::PointXYZ> ());
ne.setSearchMethod (tree);
// Output datasets
pcl::PointCloud<pcl::Normal>::Ptr cloud_normals (new pcl::PointCloud<pcl::Normal>);
// Use all neighbors in a sphere of radius 3cm
ne.setRadiusSearch (0.03);
// Compute the features
ne.compute (*cloud_normals);
// cloud_normals->size () should have the same size as the input cloud->size ()
}
以下代码片段将估计输入数据集中点子集的一组表面法线。
#include <pcl/point_types.h>
#include <pcl/features/normal_3d.h>
{
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud (new pcl::PointCloud<pcl::PointXYZ>);
... read, pass in or create a point cloud ...
// Create a set of indices to be used. For simplicity, we're going to be using the first 10% of the points in cloud
std::vector<int> indices (std::floor (cloud->size () / 10));
for (std::size_t i = 0; i < indices.size (); ++i) indices[i] = i;
// Create the normal estimation class, and pass the input dataset to it
pcl::NormalEstimation<pcl::PointXYZ, pcl::Normal> ne;
ne.setInputCloud (cloud);
// Pass the indices
pcl::shared_ptr<std::vector<int> > indicesptr (new std::vector<int> (indices));
ne.setIndices (indicesptr);
// Create an empty kdtree representation, and pass it to the normal estimation object.
// Its content will be filled inside the object, based on the given input dataset (as no other search surface is given).
pcl::search::KdTree<pcl::PointXYZ>::Ptr tree (new pcl::search::KdTree<pcl::PointXYZ> ());
ne.setSearchMethod (tree);
// Output datasets
pcl::PointCloud<pcl::Normal>::Ptr cloud_normals (new pcl::PointCloud<pcl::Normal>);
// Use all neighbors in a sphere of radius 3cm
ne.setRadiusSearch (0.03);
// Compute the features
ne.compute (*cloud_normals);
// cloud_normals->size () should have the same size as the input indicesptr->size ()
}
最后,以下代码片段将估计输入数据集中所有点的一组表面法线,但将使用另一个数据集估计它们的最近邻。如前所述,一个很好的用例是当输入是表面的缩减采样版本时。
#include <pcl/point_types.h>
#include <pcl/features/normal_3d.h>
{
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud (new pcl::PointCloud<pcl::PointXYZ>);
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_downsampled (new pcl::PointCloud<pcl::PointXYZ>);
... read, pass in or create a point cloud ...
... create a downsampled version of it ...
// Create the normal estimation class, and pass the input dataset to it
pcl::NormalEstimation<pcl::PointXYZ, pcl::Normal> ne;
ne.setInputCloud (cloud_downsampled);
// Pass the original data (before downsampling) as the search surface
ne.setSearchSurface (cloud);
// Create an empty kdtree representation, and pass it to the normal estimation object.
// Its content will be filled inside the object, based on the given surface dataset.
pcl::search::KdTree<pcl::PointXYZ>::Ptr tree (new pcl::search::KdTree<pcl::PointXYZ> ());
ne.setSearchMethod (tree);
// Output datasets
pcl::PointCloud<pcl::Normal>::Ptr cloud_normals (new pcl::PointCloud<pcl::Normal>);
// Use all neighbors in a sphere of radius 3cm
ne.setRadiusSearch (0.03);
// Compute the features
ne.compute (*cloud_normals);
// cloud_normals->size () should have the same size as the input cloud_downsampled->size ()
}


















 3536
3536

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











