




 本文详细描述了在NVIDIAJetsonOrinNano上安装Linux36.2系统,包括NVIDIAJetpack的安装,基本远程环境设置(SSH、Samba、VNC)以及开发环境的配置,强调了Linux环境的通用性和基础环境搭建的重要性。
本文详细描述了在NVIDIAJetsonOrinNano上安装Linux36.2系统,包括NVIDIAJetpack的安装,基本远程环境设置(SSH、Samba、VNC)以及开发环境的配置,强调了Linux环境的通用性和基础环境搭建的重要性。
Linux 36.2@Jetson Orin Nano之基础环境构建
1. 源由
现在流行什么,也跟风来么一个一篇。当然,后续是要用到这个AI环境的GPU算力。
不过其实很多技术都是具有共通性的,所以大可不必为此感觉很烦恼。Just do as always do!
初学爱好者都是在这种最为基础的地方卡主,然后兴趣就嘎然而止。今天安装过程中简单的在Jetson Orin Nano上敲了一个命令:
$ uname -a
Linux daniel-nvidia 5.15.122-tegra #1 SMP PREEMPT Mon Dec 18 21:24:25 PST 2023 aarch64 aarch64 aarch64 GNU/Linux
$ lsb_release -a
No LSB modules are available.
Distributor ID: Ubuntu
Description: Ubuntu 22.04.3 LTS
Release: 22.04
Codename: jammy
卧槽! 这是什么,这是什么。。。。不用多说了吧。
注:安装的是NVIDIA Jetson Linux 36.2系统。
好嘛,那就照搬咯,那我们来看看是不是一样。
2. 步骤
2.1 安装NVIDIA Jetson Linux 36.2系统
略,这部分不介绍了,就是Jetson Orin Nano Quick Start的烧录。
$ sudo apt show nvidia-jetpack
Package: nvidia-jetpack
Version: 6.0-b52
Priority: standard
Section: metapackages
Maintainer: NVIDIA Corporation
Installed-Size: 199 kB
Depends: nvidia-jetpack-runtime (= 6.0-b52), nvidia-jetpack-dev (= 6.0-b52)
Homepage: http://developer.nvidia.com/jetson
Download-Size: 29.3 kB
APT-Manual-Installed: yes
APT-Sources: https://repo.download.nvidia.com/jetson/common r36.2/main arm64 Packages
Description: NVIDIA Jetpack Meta Package
装完,系统更新下,常规操作!
$ sudo apt-get update
$ sudo apt-get upgrade
2.2 必备软件安装
新增nano和tree命令:
$ sudo apt-get install aptitude tree nano
$ sudo apt-get install vim net-tools
- tree: 目录结构,对AI程序、工程不熟悉,还是装一个适时使用。
- nano: ubuntu上经常用的,这里没有不太习惯。
- aptitude: 主要用于系统内搜索软件包使用。
- [Jetson Orin Nano自带]vim: 本人的笔记本按键有的时候会乱,但是装了vim就不会,因此,必装。
- [Jetson Orin Nano自带]net-tools: 使用ifconfig查询当前IP地址的。
2.3 基本远程环境
2.3.1 远程ssh登录
Jetson Orin Nano镜像自带openssh-server,所以下面安装命令可以直接跳过。
$ sudo apt-get install openssh-server
2.3.2 samba局域网
局域网内,映射一个网络硬盘到Windows机器上办公,还是非常方便的。
$ sudo apt-get install samba
因为samba是独立于linux系统的一个应用软件,其用户/目录需要明确指定。
一般常用安装时的用户名和目录,这里使用daniel
$ sudo smbpasswd -a daniel
samba配置非常简单
$ sudo nano /etc/samba/smb.conf
只要将HOME下的一些注释调整下即可,主要修改内容如下:
# Un-comment the following (and tweak the other settings below to suit)
# to enable the default home directory shares. This will share each
# user's home directory as \\server\username
[homes]
comment = Home Directories
browseable = no
# By default, the home directories are exported read-only. Change the
# next parameter to 'no' if you want to be able to write to them.
read only = no
# File creation mask is set to 0700 for security reasons. If you want to
# create files with group=rw permissions, set next parameter to 0775.
create mask = 0700
# Directory creation mask is set to 0700 for security reasons. If you want to
# create dirs. with group=rw permissions, set next parameter to 0775.
directory mask = 0700
# By default, \\server\username shares can be connected to by anyone
# with access to the samba server.
# Un-comment the following parameter to make sure that only "username"
# can connect to \\server\username
# This might need tweaking when using external authentication schemes
valid users = %S
配置完成后,重新启动服务。
$ sudo service smbd restart
注:关于软连接的设置,详见:《Linux 36.3 + JetPack v6.0@jetson-inference之图像分类》。
2.3.3 samba软链接访问
如果在[global]下增加以下配置,则软链接目录只要权限合适,也能像正常目录一样被Windows系统访问。
follow symlinks = yes
wide links = yes
unix extensions = no
2.3.4 VNC远程登录
*lightdm安装,请选择lightdm选项。
$ sudo apt install lightdm
$ sudo reboot
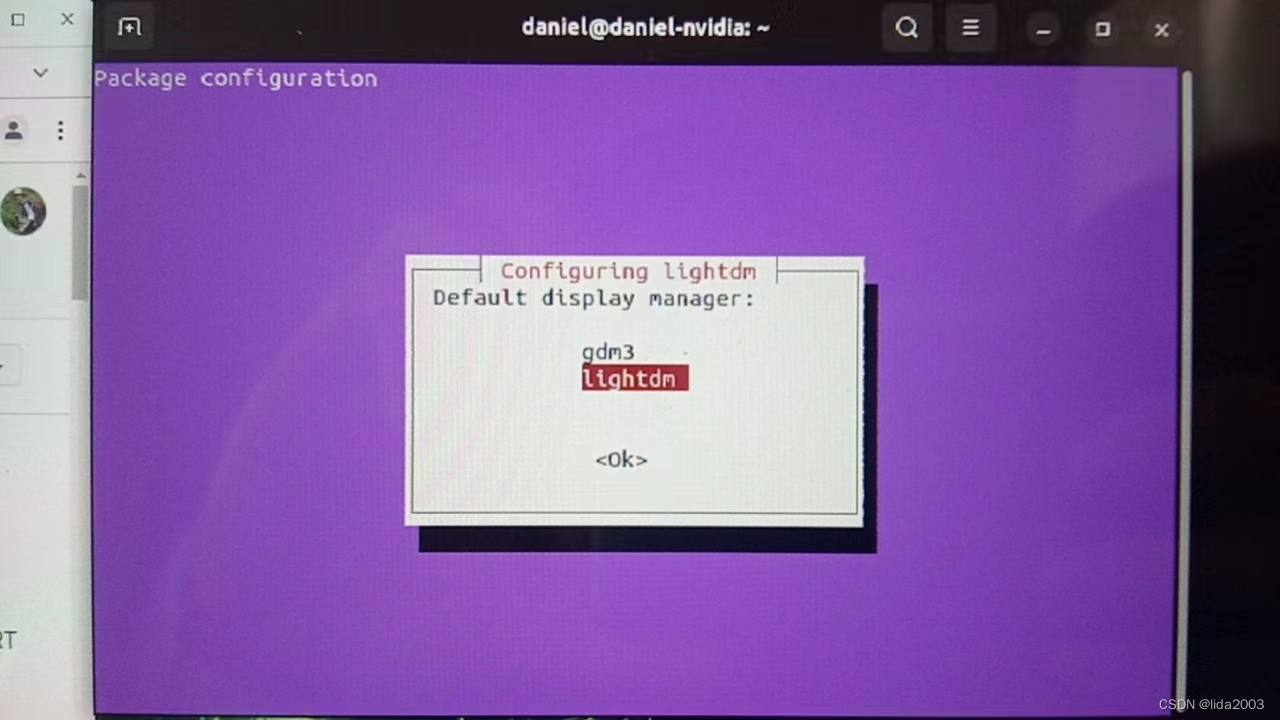
如果选错了,请使用下面命令行进行重新配置:
$ sudo dpkg-reconfigure lightdm
x11vnc安装*
$ sudo apt install x11vnc
x11vnc配置,mypassword请根据自己的需要进行修改,这只是VNC连接的密码,并非系统登录用户密码。
$ sudo nano /lib/systemd/system/x11vnc.service
$ sudo cat /lib/systemd/system/x11vnc.service
[Unit]
Description=x11vnc service
After=display-manager.service network.target syslog.target
[Service]
Type=simple
ExecStart=/usr/bin/x11vnc -forever -display :0 -auth guess -passwd mypassword
ExecStop=/usr/bin/killall x11vnc
Restart=on-failure
[Install]
WantedBy=multi-user.target
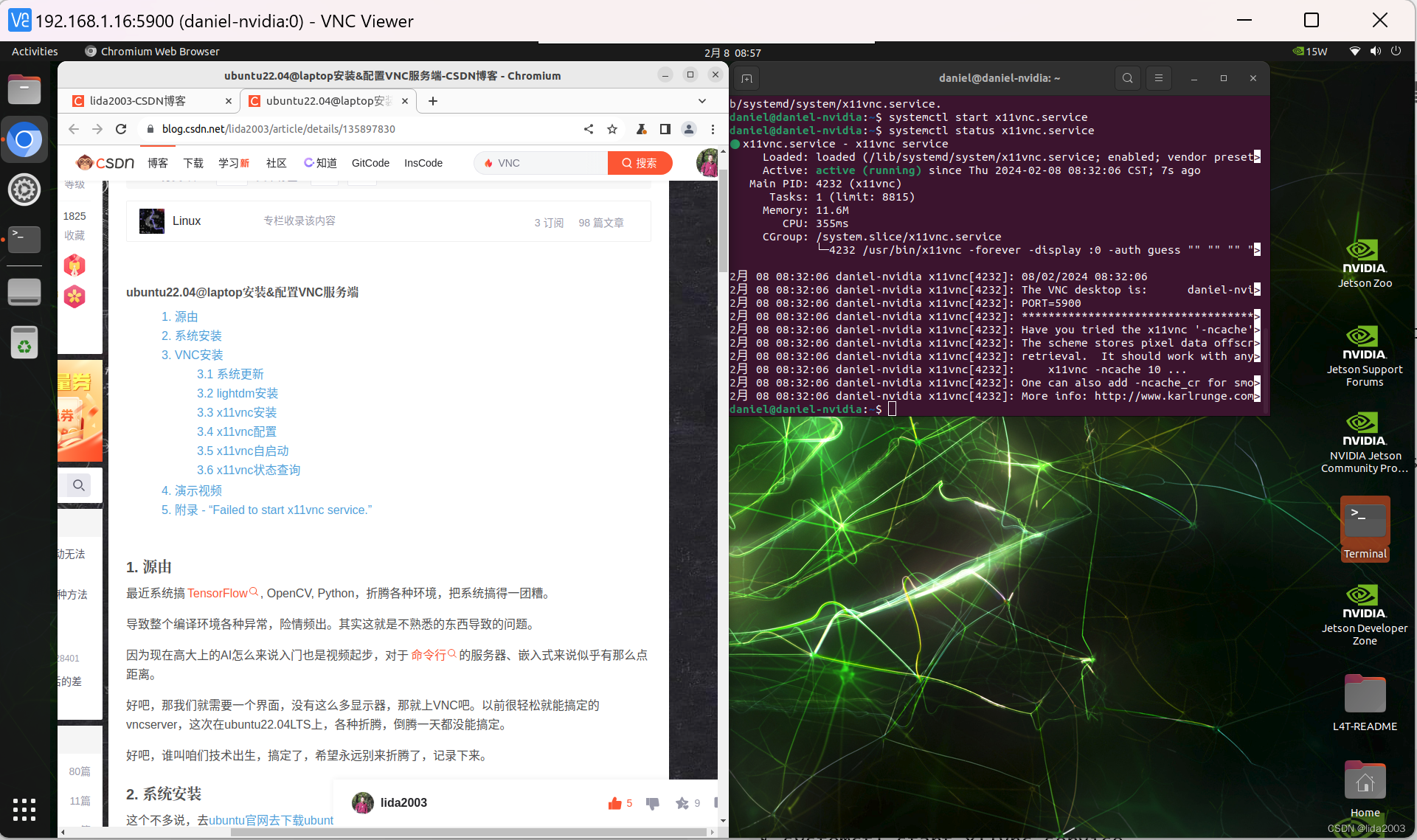
x11vnc自启动
$ systemctl daemon-reload
$ systemctl enable x11vnc.service
$ systemctl start x11vnc.service
x11vnc状态查询
$ systemctl status x11vnc.service
2.4 开发环境安装
这个因人而异,不再展开。通常来说git/svn/cvs等代码库软件是必须的。
不过Jetson自带了Git。
$ sudo apt-get install git subversion
注:Github代码下不来,可以参考:Github操作网络异常笔记。
3. 总结
熟悉Linux好处就是多,看看,这么一顿操作下来,也没什么差别嘛!
- 基本的环境安装基本也就是30分钟的事情。
- 更多的时间应该专注在领域技术细节分析和问题研究。
通过整理,与大家一起共勉,参与Jetson AI的开发!

















 2151
2151

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









