






 本文介绍了一种针对无人机的平滑轨迹规划方法,利用多项式拟合实现最小化加加速度或加加加速度的目标,确保无人机飞行稳定性和能耗效率。文章详细阐述了基于二次规划的解决方案,并探讨了路径连续性及约束条件。
本文介绍了一种针对无人机的平滑轨迹规划方法,利用多项式拟合实现最小化加加速度或加加加速度的目标,确保无人机飞行稳定性和能耗效率。文章详细阐述了基于二次规划的解决方案,并探讨了路径连续性及约束条件。
Preface:This article is written for a nifty girl who I cherish.

(0)Minimum Snap/Jerk Trajectory Generation
(0.0)Theory

Handle problem
空间中有少量路径点,试图构建一条连续的路径,这条路径经过我们所给的少数路径点,使得无人机能够平滑地飞过这个路径
Method
- 多项式有很好的特性,比如计算方便(可以用矩阵表示),可拟合高阶曲线,所以多项式拟合路径;
- 考虑到路径可能很复杂,如果整个路径用一个多项式表示,那么就会使得拟合路径的多项式阶数很高,并且不能处理闭环路径;所以我们采用每个路径点之间用一个多项式拟合;
- 并且为了使得拟合曲线满足函数的“不可一对多”,我们拟合的是一个参数方程,其自变量为时间
On drone
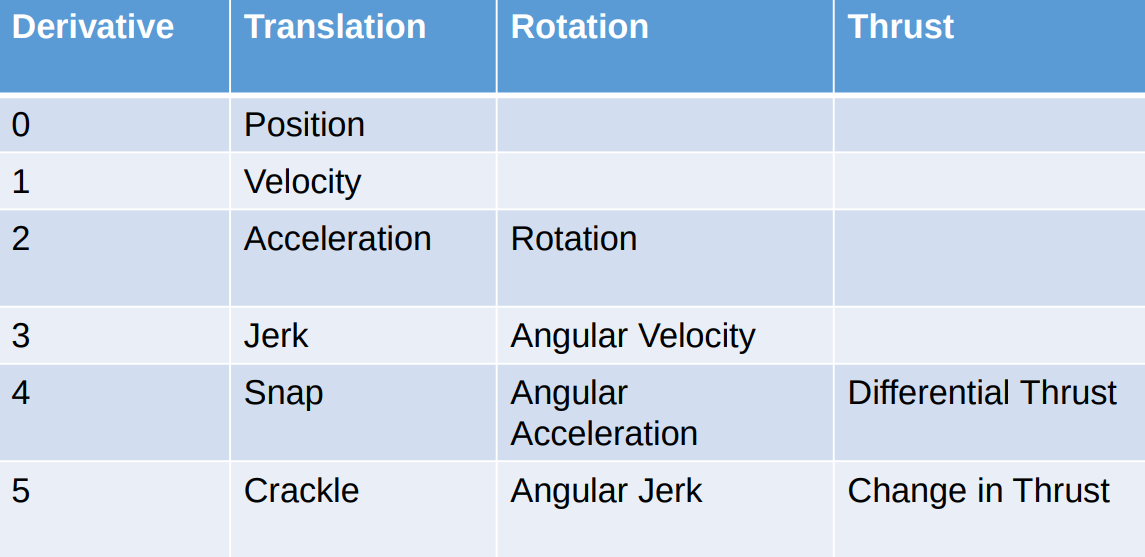
在无人机中,我们往往考虑要是得最小化加加速度(jerk)或者最小化加加加速度(snap)
- 其中
- 最小化速度(jerk)保证了无人机飞行路径最短
- 最小化加加速度(jerk)保证了无人机飞行的稳定性(因为加加速度与无人机pitch,roll轴的角速度成真比)
- 加加加速度(snap)保证了无人机的耗能最小(因为)
Problem defination
Target:最小化加加速度(jerk)或者加加加速度(snap)
Constraints:对初始结束位置速度加速度的约束,对位置点的约束,对连续的约束
这个可以转换为一个二次规划的问题,在Matlab中通过quadprog函数对其进行求解
quadprg:
x
=
q
u
a
d
p
r
o
g
(
H
,
f
,
A
,
b
,
A
e
q
,
b
e
q
,
l
b
,
u
b
)
x = quadprog(H,f,A,b,Aeq,beq,lb,ub)
x=quadprog(H,f,A,b,Aeq,beq,lb,ub)
其中:
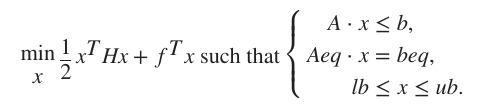
可见目标优化函数需要写作二次型的形式,约束函数写作矩阵乘向量的形式
Problem sloving
Target:
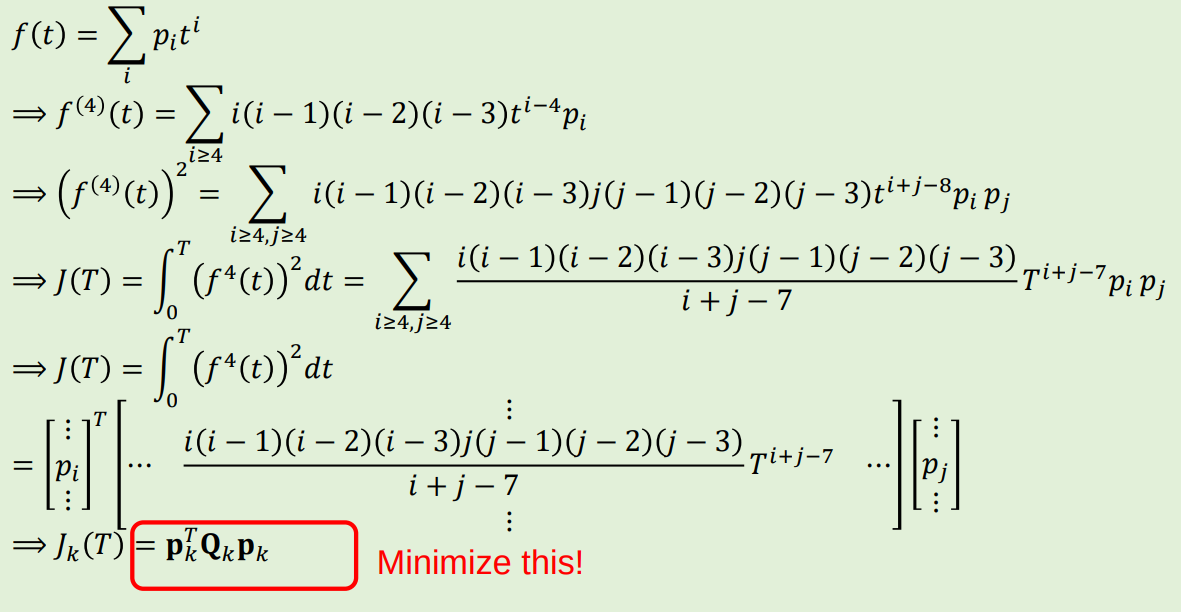
对于5次多项式的轨迹,定义优化函数:
m
i
n
∫
0
T
(
p
(
t
)
(
3
)
)
2
d
t
=
m
i
n
∑
i
=
1
k
∫
t
i
−
1
t
i
(
p
(
t
)
(
3
)
)
2
d
t
=
m
i
n
∑
i
=
1
k
∫
t
i
−
1
t
i
(
[
0
,
0
,
0
,
6
,
24
t
,
60
t
2
]
[
p
i
0
p
i
1
p
i
2
p
i
3
p
i
4
p
i
5
]
)
2
d
t
=
m
i
n
∑
i
=
1
k
∫
t
i
−
1
t
i
(
[
0
,
0
,
0
,
6
,
24
t
,
60
t
2
]
P
i
)
2
d
t
=
m
i
n
∑
i
=
1
k
∫
t
i
−
1
t
i
(
[
0
,
0
,
0
,
6
,
24
t
,
60
t
2
]
P
i
)
T
(
[
0
,
0
,
0
,
6
,
24
t
,
60
t
2
]
P
i
)
d
t
=
m
i
n
∑
i
=
1
k
P
i
T
∫
t
i
−
1
t
i
[
0
,
0
,
0
,
6
,
24
t
,
60
t
2
]
T
[
0
,
0
,
0
,
6
,
24
t
,
60
t
2
]
d
t
P
i
=
m
i
n
∑
i
=
1
k
P
i
T
Q
i
P
i
min \int_0^T(p(t)^{(3)})^2dt \\ =min \sum_{i=1}^k \int_{t_{i-1}}^{t_i}(p(t)^{(3)})^2dt \\ =min \sum_{i=1}^k \int_{t_{i-1}}^{t_i} ([0,0,0,6,24t,60t^2] \left [\begin{array}{c} p_{i0} \\p_{i1} \\p_{i2} \\p_{i3} \\p_{i4} \\p_{i5} \end{array} \right])^2dt \\ =min \sum_{i=1}^k \int_{t_{i-1}}^{t_i} ([0,0,0,6,24t,60t^2]P_i)^2dt \\ =min \sum_{i=1}^k \int_{t_{i-1}}^{t_i} ([0,0,0,6,24t,60t^2]P_i)^T([0,0,0,6,24t,60t^2]P_i)dt \\ =min \sum_{i=1}^k P_i^T\int_{t_{i-1}}^{t_i} [0,0,0,6,24t,60t^2]^T[0,0,0,6,24t,60t^2]dtP_i \\ =min \sum_{i=1}^k P_i^TQ_iP_i
min∫0T(p(t)(3))2dt=mini=1∑k∫ti−1ti(p(t)(3))2dt=mini=1∑k∫ti−1ti([0,0,0,6,24t,60t2]⎣⎢⎢⎢⎢⎢⎢⎡pi0pi1pi2pi3pi4pi5⎦⎥⎥⎥⎥⎥⎥⎤)2dt=mini=1∑k∫ti−1ti([0,0,0,6,24t,60t2]Pi)2dt=mini=1∑k∫ti−1ti([0,0,0,6,24t,60t2]Pi)T([0,0,0,6,24t,60t2]Pi)dt=mini=1∑kPiT∫ti−1ti[0,0,0,6,24t,60t2]T[0,0,0,6,24t,60t2]dtPi=mini=1∑kPiTQiPi
可见
Q
i
Q_i
Qi是一个矩阵,那么要把所有
Q
i
Q_i
Qi合并起来,又相互不参数干扰,就只有把所有矩阵用主角线把他们串起来:
(
P
1
0
⋯
0
0
0
P
2
⋯
0
0
⋮
⋮
⋱
0
0
0
0
0
p
k
−
1
0
0
0
0
0
p
k
)
\begin{pmatrix} P_1 &0&\cdots&0&0 \\0&P_2&\cdots&0&0 \\\vdots&\vdots&\ddots&0&0 \\0&0&0&p_{k-1}&0 \\0&0&0&0&p_k \end{pmatrix}
⎝⎜⎜⎜⎜⎜⎛P10⋮000P2⋮00⋯⋯⋱00000pk−100000pk⎠⎟⎟⎟⎟⎟⎞
matlab 中计算单个 Q i Q_i Qi函数可以是:
% n:polynormial order
% r:derivertive order, 1:minimum vel 2:minimum acc 3:minimum jerk 4:minimum snap
% t1:start timestamp for polynormial
% t2:end timestap for polynormial
function Q = computeQ(n,r,t1,t2)
syms x real;
a=x;
%generate simple polynormial like: x+x^2+x^3+x^4+x^5+x^6
for i=1:n
a(end+1)=a(end)*x;
end
a=diff(a,r+1);
a1(x)=a'*a;
a2=int(a1(x),x);
Q=double(subs(a2,t2)-subs(a2,t1));
Equation Constraints:

有三类约束:
- 起始点终点位置、速度、加速度约束
位置约束:
[ 1 , t , t 2 , t 3 , t 4 , t 5 ] P ⃗ 1 = x 0 [ 1 , t , t 2 , t 3 , t 4 , t 5 ] P ⃗ e = x e [1,t,t^2,t^3,t^4,t^5]\vec P_1=x_0 \\ [1,t,t^2,t^3,t^4,t^5]\vec P_e=x_e [1,t,t2,t3,t4,t5]P1=x0[1,t,t2,t3,t4,t5]Pe=xe
速度约束:
[ 0 , 1 , 2 t , 3 t 2 , 4 t 3 , 5 t 4 ] P ⃗ 1 = v 0 [ 0 , 1 , 2 t , 3 t 2 , 4 t 3 , 5 t 4 ] P ⃗ e = v e [0,1,2t,3t^2,4t^3,5t^4]\vec P_1=v_0 \\ [0,1,2t,3t^2,4t^3,5t^4]\vec P_e=v_e [0,1,2t,3t2,4t3,5t4]P1=v0[0,1,2t,3t2,4t3,5t4]Pe=ve
加速度约束:
[ 0 , 0 , 2 , 6 t , 12 t 2 , 20 t 3 ] P ⃗ 1 = a 0 [ 0 , 0 , 2 , 6 t , 12 t 2 , 20 t 3 ] P ⃗ e = a e [0,0,2,6t,12t^2,20t^3]\vec P_1=a_0 \\ [0,0,2,6t,12t^2,20t^3]\vec P_e=a_e [0,0,2,6t,12t2,20t3]P1=a0[0,0,2,6t,12t2,20t3]Pe=ae
matlab先求多项式,再求导,代入 t t t值,列出矩阵与向量
有六个方程 - 中间点位置约束
[ 1 , t , t 2 , t 3 , t 4 , t 5 ] P ⃗ n = x n [1,t,t^2,t^3,t^4,t^5]\vec P_n=x_n [1,t,t2,t3,t4,t5]Pn=xn
其中 n = 2 , 3 , 4... k − 2 , k − 1 n=2,3,4...k-2,k-1 n=2,3,4...k−2,k−1
有k-2个方程 - 中间点连续约束
位置连续:
[ 1 , t , t 2 , t 3 , t 4 , t 5 ] P ⃗ n − 1 = [ 1 , t , t 2 , t 3 , t 4 , t 5 ] P ⃗ n 即 : [ 1 , t , t 2 , t 3 , t 4 , t 5 ] P ⃗ n − 1 − [ 1 , t , t 2 , t 3 , t 4 , t 5 ] P ⃗ n = 0 即 : [ 1 , t , t 2 , t 3 , t 4 , t 5 , − 1 , − t , − t 2 , − t 3 , − t 4 , − t 5 ] [ P ⃗ n − 1 P ⃗ n ] = 0 [1,t,t^2,t^3,t^4,t^5]\vec P_{n-1}=[1,t,t^2,t^3,t^4,t^5]\vec P_n \\即: [1,t,t^2,t^3,t^4,t^5]\vec P_{n-1}-[1,t,t^2,t^3,t^4,t^5]\vec P_n=0 \\即:[1,t,t^2,t^3,t^4,t^5,-1,-t,-t^2,-t^3,-t^4,-t^5]\left [\begin{array}{c} \vec P_{n-1} \\ \vec P_n \end{array} \right]=0 [1,t,t2,t3,t4,t5]Pn−1=[1,t,t2,t3,t4,t5]Pn即:[1,t,t2,t3,t4,t5]Pn−1−[1,t,t2,t3,t4,t5]Pn=0即:[1,t,t2,t3,t4,t5,−1,−t,−t2,−t3,−t4,−t5][Pn−1Pn]=0
同理速度连续:
[ 0 , 1 , 2 t , 3 t 2 , 4 t 3 , 5 t 4 , − 0 , − 1 , − 2 t , − 3 t 2 , − 4 t 3 , − 5 t 4 ] [ P ⃗ n − 1 P ⃗ n ] = 0 [0,1,2t,3t^2,4t^3,5t^4,-0,-1,-2t,-3t^2,-4t^3,-5t^4]\left [\begin{array}{c} \vec P_{n-1} \\ \vec P_n \end{array} \right]=0 [0,1,2t,3t2,4t3,5t4,−0,−1,−2t,−3t2,−4t3,−5t4][Pn−1Pn]=0
同理加速度连续:
[ 0 , 0 , 2 , 6 t , 12 t 2 , 20 t 3 , − 0 , − 0 , − 2 , − 6 t , − 12 t 2 , − 20 t 3 ] [ P ⃗ n − 1 P ⃗ n ] = 0 [0,0,2,6t,12t^2,20t^3,-0,-0,-2,-6t,-12t^2,-20t^3]\left [\begin{array}{c} \vec P_{n-1} \\ \vec P_n \end{array} \right]=0 [0,0,2,6t,12t2,20t3,−0,−0,−2,−6t,−12t2,−20t3][Pn−1Pn]=0
这里在matlab中就要注意排列约束的时候要按照顺序排列,这样才能保证中间点约束
有(k-2)x3个方程
综上:一共有(k-2)x4+6个约束方程
(0.1)codes
(1)A* algorithm

(1.0)Description
初始化
初始化Map矩阵,保存地图信息,1为障碍,0不是障碍
初始化gScore矩阵,保存分数信息,设置开始点为1,其余为无穷
初始化expanded矩阵,保存访问信息,设置全为0
初始化parents矩阵,用于保存节点的父节点信息,易于回溯
初始化queue矩阵,用于保存待访问节点,内部只有初始节点
while (queue不为空)
从queue中取出g+h分数最小的节点p
标记节点p于expanded为1
把p节点从queue中删除
找出p节点邻居节点中满足以下条件的节点ps:
非障碍物,没有越界,没有被访问过
将这些节点ps的父节点parents设置为p
如果ps中含有终点,跳出while循环
如果终点没有父节点
没有可达路径
如果终点有父节点
从parents中向上不断寻找父节点,直到访问到开始节点,记录路径
(1.1)coding with matlab
- 于matlab中数组中添加一个向量
queue(end+1,:)=map(1,:);
- 于matlab中删除一个向量
queue(minIndex,:)=[];
- matlab 反转一个向量
Optimal_path=flip(Optimal_path)
(1.2)codes
(2)More things
(2.0)Minimum polynomial degree

WHY?
(2.1)Polynomial Trajectories - corridor
- Problems: 得到的路径可能会撞到障碍物,我们需要设置一定的可通行区域,保证无人机于区域内飞行
- Methods: 在可行路径中添加采样点,设置不等式约束,保证采样点都满足不等式约束
即:
[ 1 , t , t 2 , t 3 , t 4 , t 5 ] p j < p ( j ) + r [1,t,t^2,t^3,t^4,t^5]p_{j}<p(j)+r [1,t,t2,t3,t4,t5]pj<p(j)+r
[ − 1 , − t , − t 2 , − t 3 , − t 4 , − t 5 ] p j < − p ( j ) − r [-1,-t,-t^2,-t^3,-t^4,-t^5]p_{j}<-p(j)-r [−1,−t,−t2,−t3,−t4,−t5]pj<−p(j)−r
p ( j ) p(j) p(j)为采样点的位置, p j p_{j} pj是采样点段的多项式参数,时间是到达该点的时间
实际还有可行性检测(feasibility check),确保速度,加速度能够达到
(2.2)Polynomial Trajectories - divide time
- Problems: 现有时间分配不合理,我们约束是每一维度的速度相同,但速度叠加后速度就不同了
- Methods: 匀速分配,梯形分配
(2.3)Polynomial Trajectories - Closed form
- Problems: 二次规划求解速度慢
- methods: 闭式求解(只能有等式约束),只需要矩阵运算求解
(3)Reference
https://blog.youkuaiyun.com/q597967420/article/details/76099491

















 1799
1799

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









