




 本文深入探讨了机器人学中DH参数的两种表示方法——标准DH和改进DH,详细解析了它们在坐标系设置、参数定义及坐标变换上的差异,并通过实例展示了如何应用这两种方法为机器人手臂建立坐标系。
本文深入探讨了机器人学中DH参数的两种表示方法——标准DH和改进DH,详细解析了它们在坐标系设置、参数定义及坐标变换上的差异,并通过实例展示了如何应用这两种方法为机器人手臂建立坐标系。
浅尝辄止是乐趣,也导向惶恐
前言
这个学期开了“机器人学”的课程,学到了机器人手臂位置的表示,老师主要教的mDH,后来略微提到了sDH,在提到标准的DH表示后有不理解,于是自己钻研了一会,在在这里写下来,以防止以后自己再有不解,再者也是分享给诸位。
读本文的前提:掌握了基本的坐标变换,至少知道mDH或者sDH中一种
重要理解
1.一个连杆对应一个坐标系,坐标系代表了连杆的特征。
2.连杆与连杆之间的位置关系对应就是坐标与坐标的位置关系。
3.一个连杆的坐标系可以固连在连杆的任何位置,坐标系的轴方向也可以是任意,mDH与sDH只是规定了坐标系固连的位置与坐标系轴的朝向的一种建模方法。
4.DH表描述的是杆之间的关系
描述
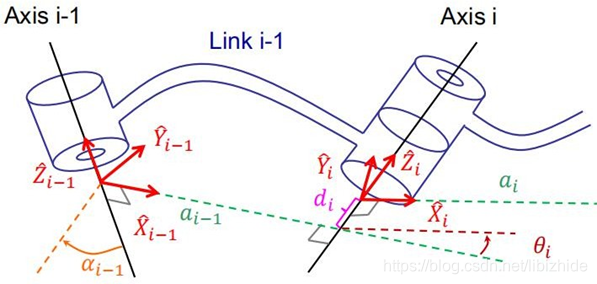
1.改进DH:连杆的坐标系放置在连杆的近端(即上一个关节i的位置),Z轴方向上一个i关节轴向平行(朝向可自拟定),X轴朝向上一个关节i轴向与下一个j关节j轴向的叉乘方向(即两关节的公垂线(公法线)方向)。
DH参数:(αi−1,ai−1,θi,di)(αi-1,ai-1,θi,di)(αi−1,ai−1,θi,di)
角度确定:
αi−1:以Xi−1方向看,Zi−1和Zi之间的夹角αi-1:以Xi-1方向看,Zi-1和Zi之间的夹角αi−1:以Xi−1方向看,Zi−1和Zi之间的夹角
ai−1:沿着Xi−1方向,Zi−1和Zi之间的距离ai-1:沿着Xi-1方向,Zi-1和Zi之间的距离ai−1:沿着Xi−1方向,Zi−1和Zi之间的距离
θi:以Zi方向看,Xi−1和Xi之间的夹角θi:以Zi方向看,Xi-1和Xi之间的夹角θi:以Zi方向看,Xi−
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2573
2573

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









