




 该教程介绍了如何使用catkin工具创建ROS软件包,包括在vscode中打开包,新建节点,以及编辑CMakeLists.txt文件来添加编译规则,确保节点能够正确编译。
该教程介绍了如何使用catkin工具创建ROS软件包,包括在vscode中打开包,新建节点,以及编辑CMakeLists.txt文件来添加编译规则,确保节点能够正确编译。
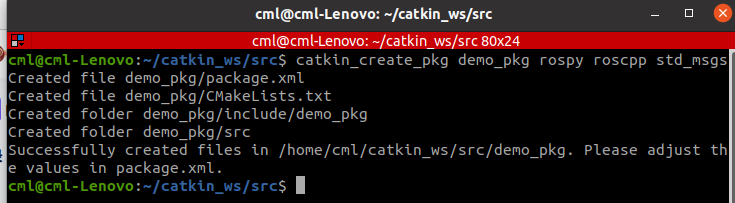
第一步:用catkin工具创建一个软件包:catkin_create_pkg + < 包名> + <依赖项列表>
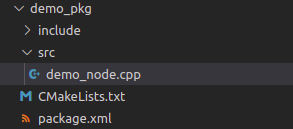
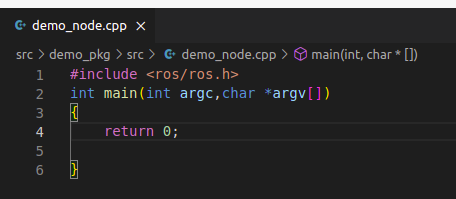
第二步:用vscode打开demo_pkg,在Src目录下新建demo_node
第三步:为文件里新建的节点添加编译规则
1.在CMakeLists.txt文件注释里,找到Build章节,
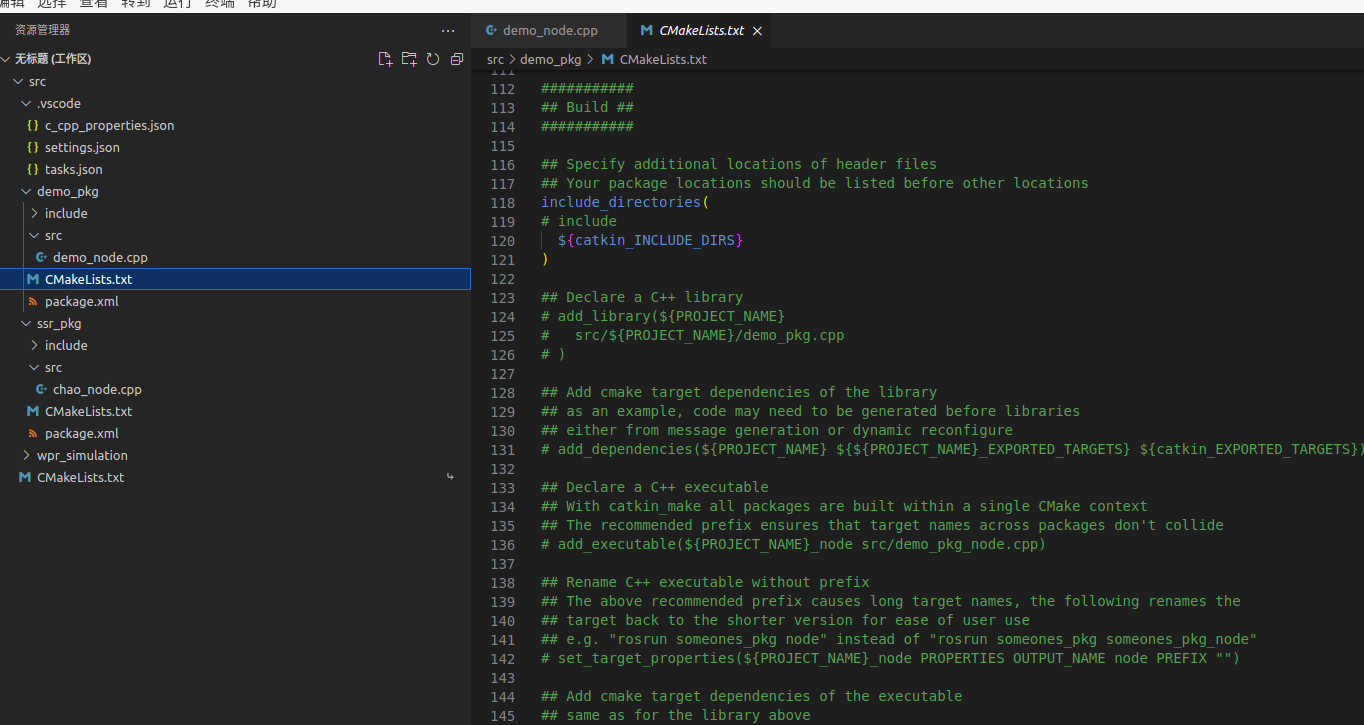
2.找到##Declare a C++ executable

将add_executable(${PROJECT_NAME}_node src/demo_pkg_node.cpp)添加到CMakeLists.txt文件末尾,${PROJECT_NAME}将用改成节点名字demo;蓝色部分是指定从哪个代码文件进行编译,
改为add_executable(demo_node src/demo_node.cpp)
第四步:对文件进行编译

















 805
805

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









