



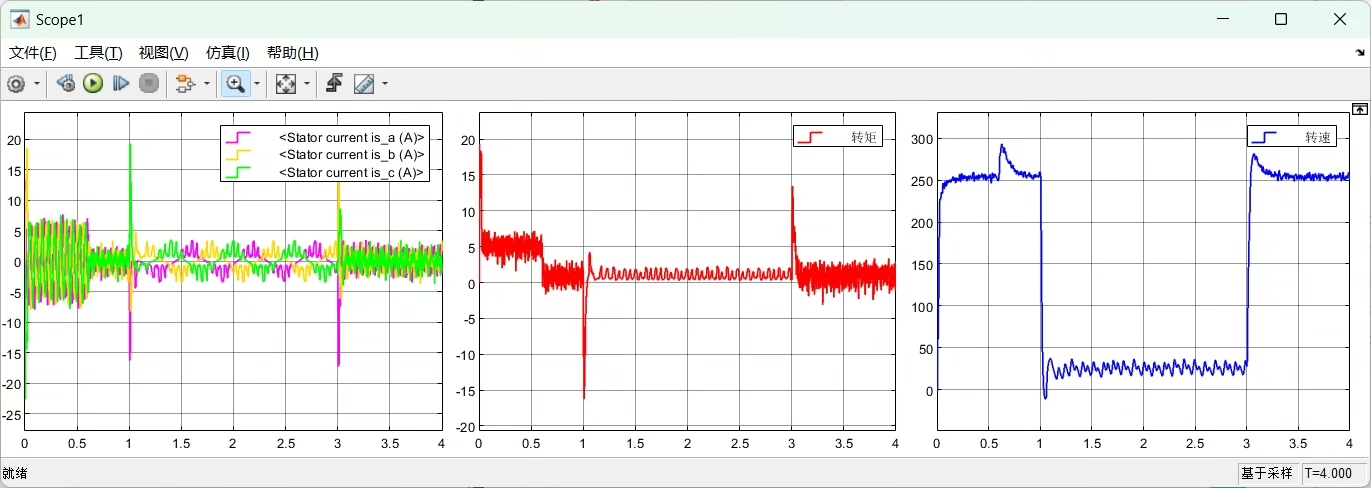
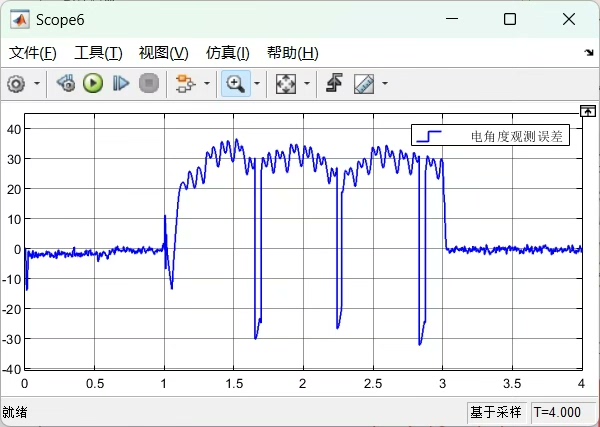
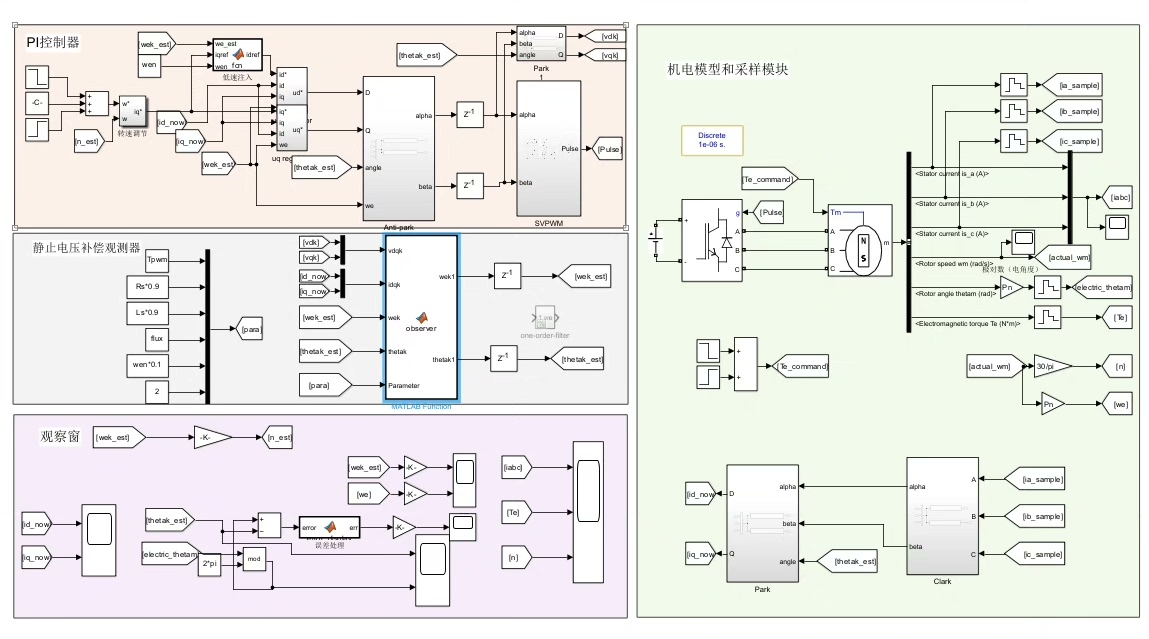
基于静态电压补偿法的永磁同步电机无感控制simulink仿真模型 该方法属于模型法,其优势在于基本不需要调节任何参数就可以带载零速启动,代码简单且证明了在任意初始转子位置下观测角度均可以在一个电角度周期内收敛。 但由于其在低速下的带宽过小,在电机突然反转时会产生较大的角度观测误差。 高速下观测角速度又会引入很大的噪声。 联系后请加好友邮箱,模型默认为2017b版本,若有更低版本的需求也。 注:本商品为电子文档,一经,恕不退换。 由于该方法的证明比较复杂,暂时无法提供理论上的,但模型上若有问题请一定找我,一定与你共同学习。
最近研究永磁同步电机无感控制,接触到了基于静态电压补偿法的相关内容,和大家分享下。
一、静态电压补偿法的优势
这种方法属于模型法,最大的亮点就是基本不需要调节什么参数,就能实现带载零速启动。这对于实际应用来说,简直太友好了有没有!就像给电机装了个“傻瓜式”启动按钮,上手简单。
而且代码也很简洁。咱们来看一段简单示意代码(这里只是示意,实际项目中会更复杂):
% 简单模拟静态电压补偿法部分代码
% 假设已经获取到电机相关参数
% 定子电阻Rs
Rs = 0.5;
% 永磁体磁链lambda_f
lambda_f = 0.1;
% 电压补偿计算
V_compensated = Rs * i + lambda_f * omega;这段代码里,通过简单的公式计算出补偿后的电压V_compensated ,这里i是电流,omega是角速度。从代码就能看出,逻辑不复杂,容易理解和实现。
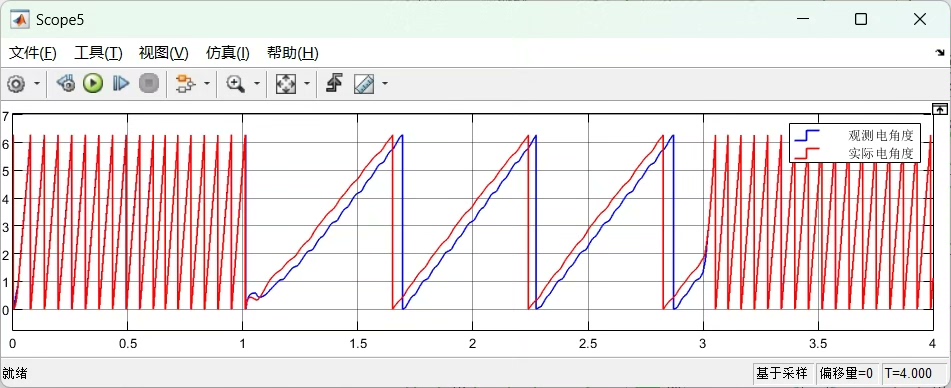
同时,这个方法还证明了在任意初始转子位置下,观测角度均可以在一个电角度周期内收敛。这就保证了电机启动和运行时角度观测的可靠性。
二、不可忽视的缺点
然而,这方法也不是十全十美的。在低速运行的时候,它的带宽过小。想象一下,电机就像一辆车,低速时带宽小就好比车在慢开的时候,方向盘的灵活度受限。当电机突然反转,就会产生较大的角度观测误差。就像车慢速转弯,结果方向判断错了,肯定影响行驶。
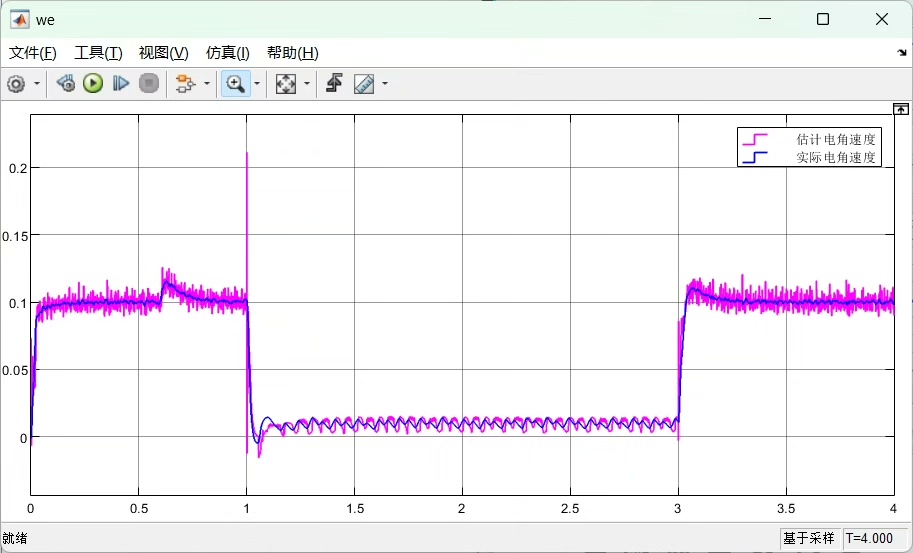
在高速运行状态下,又出现新问题了,观测角速度会引入很大的噪声。这就像车开快了,突然有各种杂音干扰驾驶员判断车速。
三、关于模型版本及其他
这个Simulink仿真模型默认是2017b版本,如果有朋友需要更低版本,也是可以联系的哈。这里留个邮箱,大家有问题可以加好友邮箱交流(邮箱:[具体邮箱])。
需要注意的是,本商品是电子文档,一经售出,恕不退换。另外,这个方法的理论证明比较复杂,暂时没办法提供理论层面的内容。不过要是模型在使用过程中有任何问题,尽管来找我,咱们一起研究学习。
希望通过这篇博文,能让大家对基于静态电压补偿法的永磁同步电机无感控制Simulink仿真模型有更清晰的认识。一起在电机控制的研究道路上“打怪升级”!

















 1410
1410

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









