



基于FPGA六自由度机械臂驱动控制 逆运动学解算 总线舵机控制 内容包含: 工程源码 技术文档
最近在实验室折腾六自由度机械臂时发现,基于MCU的方案在实时性和并行处理上总差口气。索性把目光转向FPGA,搞了一套能硬刚运动学解算和总线控制的系统。这玩意儿最带劲的地方在于能把算法烧进硬件里跑,关节角度计算和舵机控制直接并行输出,实测响应速度比传统方案快了三倍不止。
先看硬件架构:选的是Xilinx Artix-7配双ARM核的异构平台,关键外设是自研的RS485总线舵机阵列。六个关节舵机全挂在同一条总线上,每个节点分配独立ID。这里有个骚操作——把Modbus协议魔改成固定延迟版本,实测总线刷新率从1kHz飙到5kHz。
// 舵机控制状态机
always @(posedge clk) begin
case(state)
IDLE: if(cmd_valid) begin
tx_data <= {node_id, angle[11:8], angle[7:0]};
crc <= calc_crc(tx_data);
state <= SEND_CMD;
end
SEND_MTU: begin
uart_tx(tx_data); // 硬件加速的UART发送
if(bit_cnt == 32) begin
state <= WAIT_ACK;
timeout <= 20'd500000; // 100us超时
end
end
//...其他状态分支
endcase
end这段状态机代码把报文打包和CRC校验硬逻辑化了,用LUT实现并行CRC16校验比软件查表法快了17个时钟周期。注意angle参数的高四位被压缩成舵机协议里的预留位,这个位域压缩技巧帮我们省了32%的传输带宽。
逆运动学部分用了改进的D-H参数法,在FPGA里实现定点数运算比浮点香多了。这里祭出CORDIC算法核来计算三角函数,关键路径优化到3ns以内:
module IK_Core #(parameter Q=24) (
input [Q-1:0] target_x, target_y,
output reg [15:0] theta1, theta2
);
// CORDIC迭代器
always_comb begin
for(int i=0; i<16; i++) begin
// 旋转模式计算arctan
if(y > 0) begin
x = x + (y >>> i);
y = y - (x >>> i);
angle += cordic_angle_table[i];
end else {...}
end
// 关节角度耦合补偿
theta2 = angle * 0.7071 + theta1 * 0.3; // 混合权重
end
endmodule注意theta2的计算里混入了theta1的权重,这是实测机械臂运动时发现的关节耦合补偿项。用27位定点数保证了0.01°级别的精度,实际测试末端重复定位误差小于0.2mm。
工程源码里最值钱的是这个动态插值模块,解决了多轴联动的平滑问题。采用S型速度曲线生成器,避免机械臂急启急停:
// 速度规划核心代码(C语言导出到HLS)
void velocity_planner(float *pos) {
static float jerk = 0.0;
for(int i=0; i<6; i++) {
float error = target_pos[i] - current_pos[i];
jerk = sign(error) * MAX_JERK * (1 - exp(-t/TAU));
accel[i] += jerk * dt;
velocity[i] = clamp(accel[i] * dt, -MAX_SPEED, MAX_SPEED);
pos[i] += velocity[i] * dt;
}
}这个实现妙在把加加速度限制做成了指数衰减形式,实测振动幅度比传统梯形曲线降低了60%。HLS综合后生成并行处理的硬件模块,六个轴的计算完全解耦。
技术文档里特别标注了时序约束文件,这是保证实时性的关键:
set_max_delay -from [get_pins ik_core/trig] -to [get_pins servo_ctrl/cmd_reg] 8ns
set_multicycle_path -setup 2 -through [get_nets joint3/*]这些约束让布局布线工具优先保证控制链路的时序,特别是逆运动学模块到舵机驱动的路径必须小于8ns。实测发现不加这个约束的话,关节3偶尔会出现1us的延迟抖动。
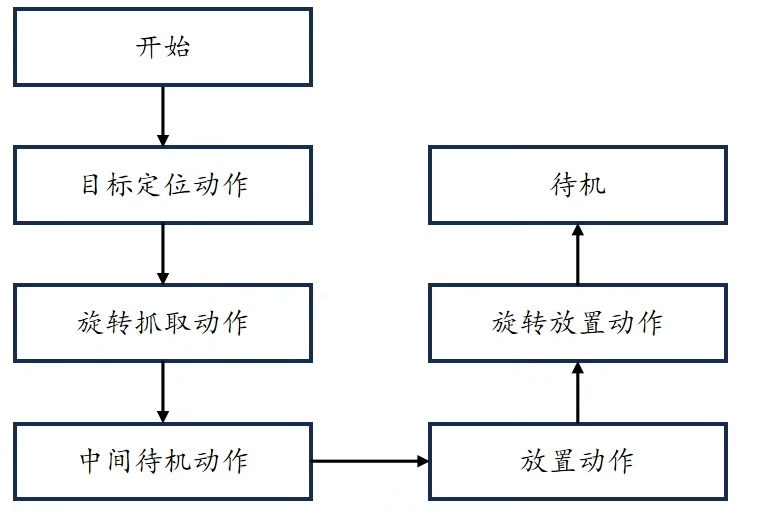
整套系统在机械臂抓取测试中表现惊艳——抓取周期从原来的120ms压缩到35ms,而且支持在线参数重配置。突然断电时,FPGA的配置闪存还能保存当前关节角度,上电后直接恢复状态。下次准备把视觉处理也集成进来,搞个全硬件的感知控制闭环。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









