



三轴示教 可编程 触摸屏程序 功能强大 触摸屏 PLC 程序 汇川plc 三轴简易示教系统,学习性强,程序简单易用。 支持工艺路径保存,可以保存四组工艺路径。 每个工艺路径支持示教100步。 汇川H5U与 mcgs触摸屏简易示教系统,支持离线仿真。 有较好的学习性,可以在源码基础上任意修改,注释明确。 注意:源码程序文件。
刚接触汇川H5U搞三轴控制那会儿,发现这玩意儿比想象中好玩。特别是搭配MCGS触摸屏做出来的示教系统,简直就是给机械手装了个"记忆外挂"——手把手教它走几遍动作,程序自己就能记住路线,下次直接复现不带喘气的。
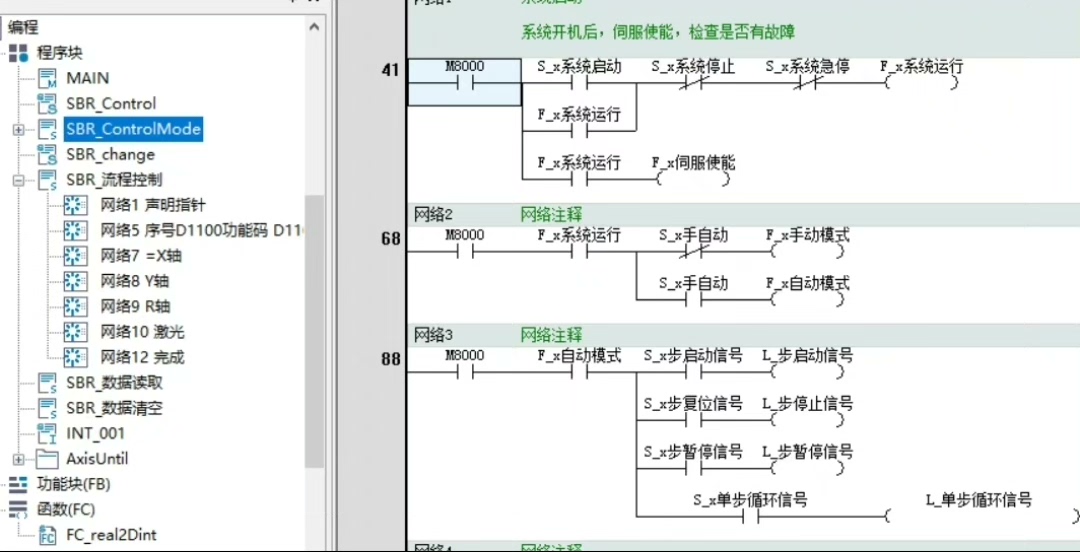
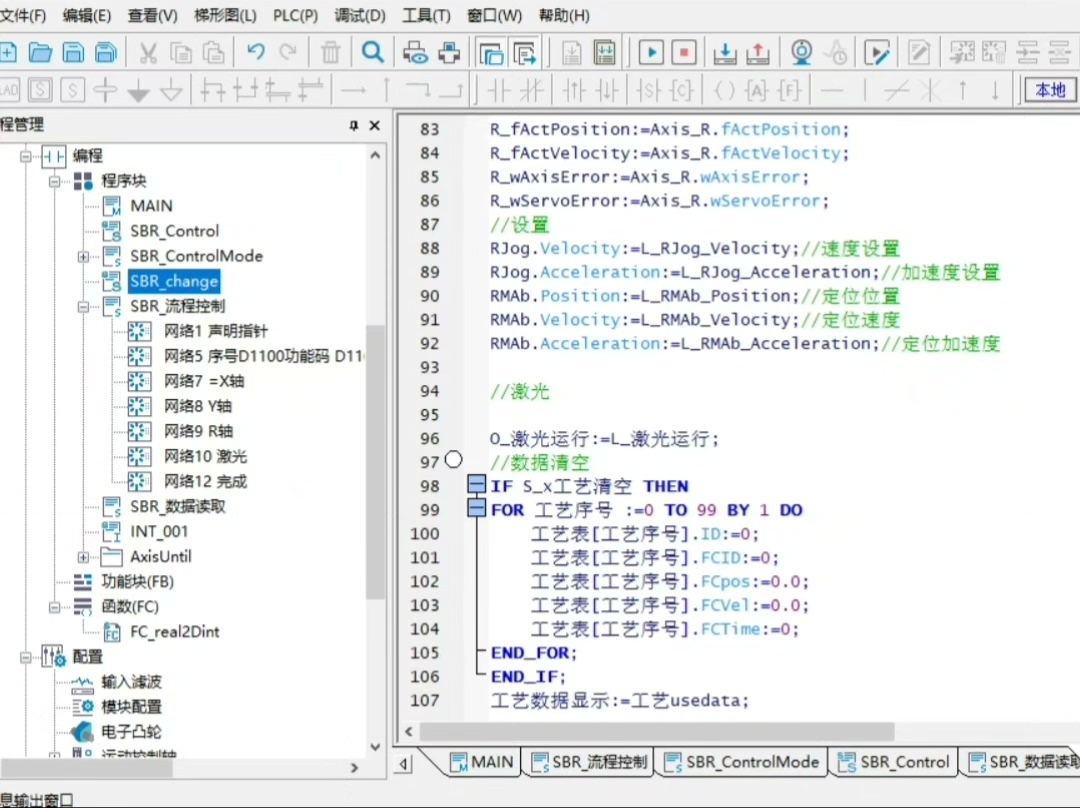
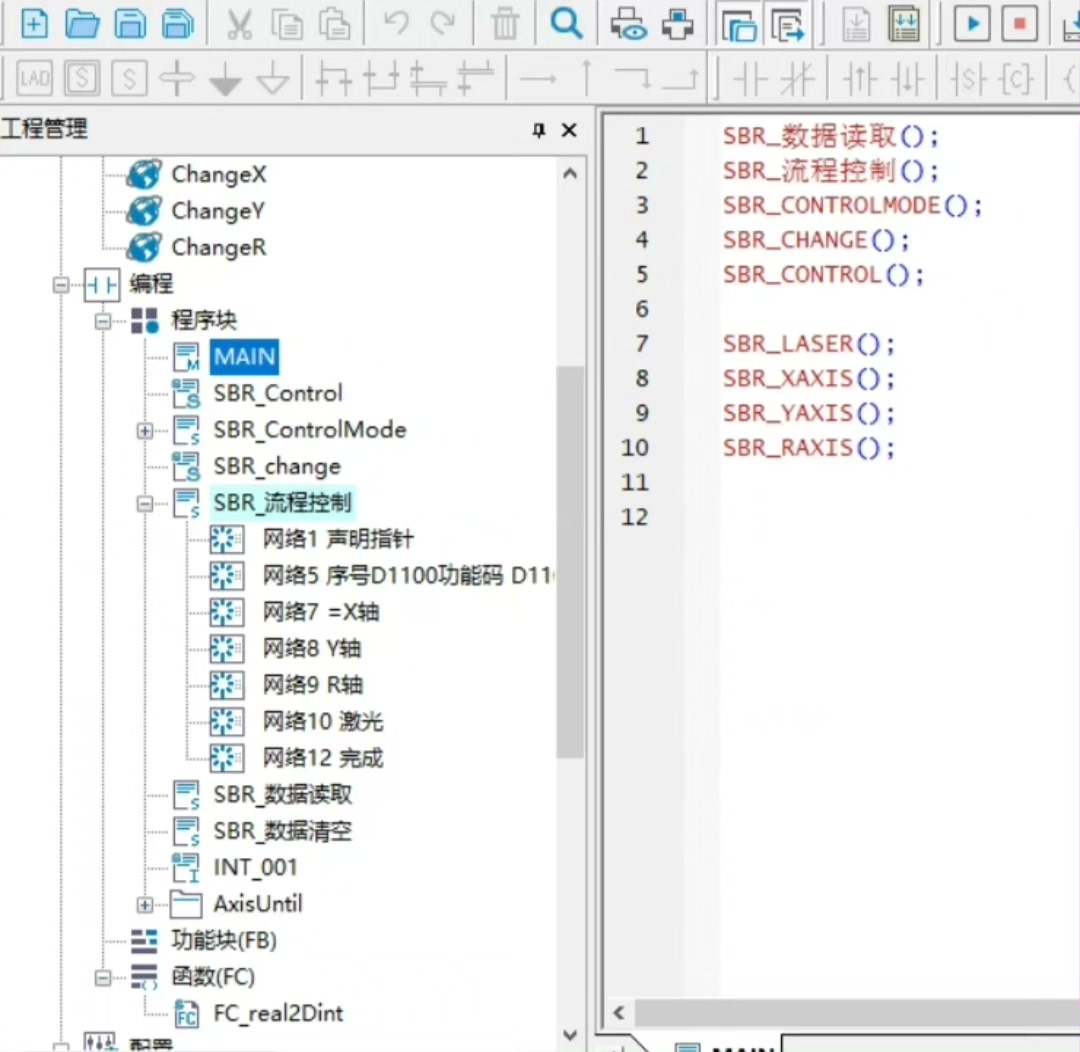
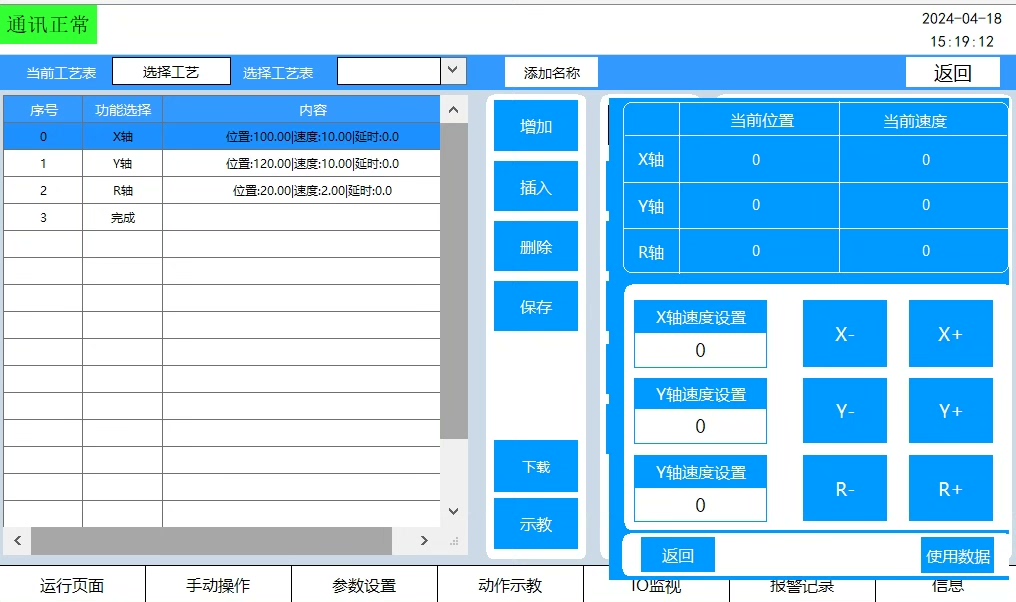
先看核心玩法:系统能存四组工艺路径,每组最多录100个动作节点。这配置对付常见的取放、焊接场景足够了。操作界面直接上触摸屏,工人师傅不用懂代码,对着设备戳屏幕就能调出不同工艺方案。PLC程序里用了结构化文本+梯形图混编,逻辑看着特直白:
//示教点记录函数
FUN RecordPoint(axisNo:INT, pointIndex:INT)
VAR
currentPos : LREAL;
END_VAR
currentPos := Axis[axisNo].ActualPosition;
TeachPoints[axisNo, pointIndex] := currentPos;这段代码看着就像大白话——实时读取轴位置,塞进二维数组里。数组第一维区分XYZ三轴,第二维就是那100个步序。实际调试时发现用LREAL类型存坐标,精度能到0.001mm,比某些用INT换算的系统靠谱多了。
触摸屏的骚操作在于离线仿真。MCGS里做了个虚拟机械臂模型,直接关联PLC变量。试动作时根本不用接真实设备,屏幕上就能看到三轴运动轨迹。这对新手特别友好,随便改参数也不怕撞机。HMI脚本里有个关键判断:
-- 运动模拟计算
function simulateMove(targetX, targetY, targetZ)
local dx = math.abs(targetX - currentX)
local dy = math.abs(targetY - currentY)
local dz = math.abs(targetZ - currentZ)
totalTime = math.max(dx, dy, dz) / config.speed
animateArm(targetX, targetY, targetZ, totalTime)
end这脚本不仅计算运动时间,还根据最大位移轴决定动画时长。调试时发现如果去掉math.max直接用dx+dy+dz,动画会变得鬼畜,后来才悟出应该取最大轴向变化量更符合真实运动逻辑。

程序扩展性是这系统的隐藏亮点。源码里留了十几个功能块接口,像安全区域检测、速度自适应这些模块都是可插拔的。有次给产线加了个光电传感器,只在现有程序里加了段中断处理:
//急停中断服务
INTERRUPT EmergencyStop
FOR i:=1 TO 3 DO
Axis[i].Stop();
END_FOR
AlarmLog.Write('急停触发');
END_INTERRUPT最骚的是注释里连硬件接线图都标好了,哪个输入点接急停按钮写得明明白白。有次设备厂的人来维护,看到程序里的TODO注释直接笑出声——"此处建议加个防呆延时,否则新手容易手抖录错点"这种提示简直像老司机在现场指导。

玩转这套系统后发现,所谓"简易"示教其实暗藏玄机。从路径规划到异常处理,每个模块都留着扩展口子。有次试着把示教数据导出成CSV,用Python做了个轨迹优化算法再导回去,居然无缝衔接。这种开放架构比那些封得严严实实的商业系统有意思多了,特别适合喜欢折腾的技术控。


















 8250
8250

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









