 级联H桥储能系统SOC均衡与控制
级联H桥储能系统SOC均衡与控制




级联H桥储能系统研究与设计 soc均衡控制,相内soc均衡,相间soc均衡,蓄电池充放电控制 级联h桥储能 级联H桥,dq坐标系下的pi解耦控制,有参考论文,控制方法走论文
在电力储能领域,级联H桥储能系统因其独特优势备受关注。今天咱们就来深入聊聊它的SOC均衡控制等关键要点。
SOC均衡控制的重要性
在级联H桥储能系统中,电池组的状态-of-charge(SOC)均衡控制至关重要。想象一下,如果各个电池的SOC不一致,就好比一群马拉松选手,有的体力充沛,有的已经快精疲力尽,这样整个系统的性能必然大打折扣。
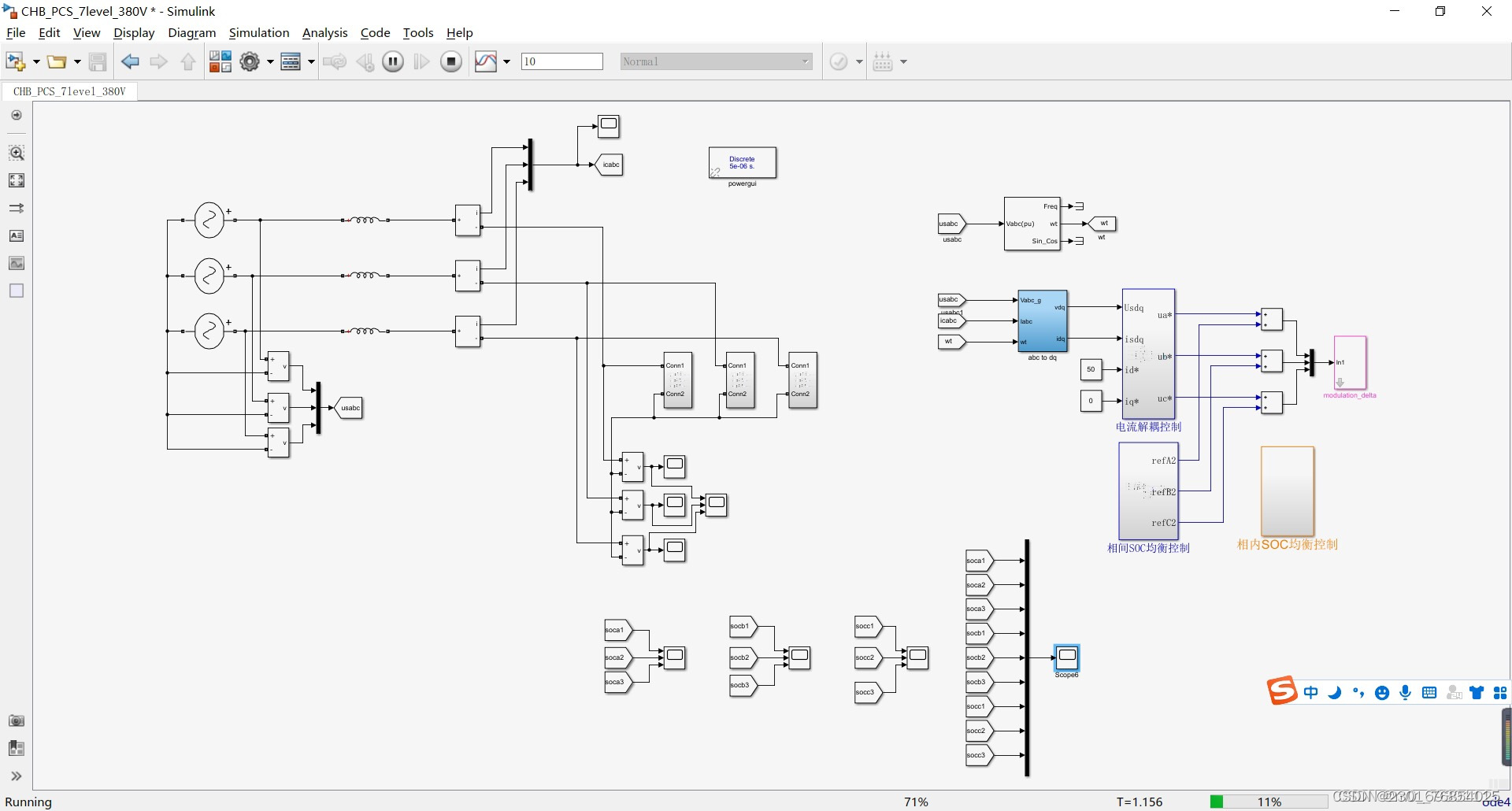
相内SOC均衡
相内SOC均衡主要针对同一相内不同H桥模块的电池SOC进行调节。以某具体系统为例,我们假设每个H桥模块由一个电池组供电,为了实现相内SOC均衡,我们可能会用到类似如下逻辑(伪代码示意):
# 假设soc_list为存储同一相内各H桥模块电池SOC值的列表
soc_list = [0.7, 0.65, 0.72]
avg_soc = sum(soc_list) / len(soc_list)
for i in range(len(soc_list)):
if soc_list[i] > avg_soc:
# 对SOC高的模块进行适当放电操作,这里简单示意减少充电功率
charge_power[i] -= 10
elif soc_list[i] < avg_soc:
# 对SOC低的模块增加充电功率
charge_power[i] += 10 这里通过计算同一相内各模块的平均SOC,然后对比每个模块的SOC,对高于或低于平均值的模块分别调整充放电功率,逐步实现相内SOC均衡。
相间SOC均衡
相间SOC均衡则是着眼于不同相之间的SOC平衡。这通常涉及到更复杂的系统间协调。在实际实现中,可能需要获取各相的SOC整体信息,然后通过某种算法来分配功率。例如,假设我们有三相系统,分别为A相、B相、C相,我们可以通过一个函数来实现相间SOC均衡(伪代码):
def inter_phase_soc_balance(soc_a, soc_b, soc_c):
total_soc = soc_a + soc_b + soc_c
avg_soc = total_soc / 3
if soc_a > avg_soc:
# A相功率调整策略,如减少A相充电功率
power_a -= 20
elif soc_a < avg_soc:
power_a += 20
if soc_b > avg_soc:
power_b -= 20
elif soc_b < avg_soc:
power_b += 20
if soc_c > avg_soc:
power_c -= 20
elif soc_c < avg_soc:
power_c += 20
return power_a, power_b, power_c 这个函数接收三相的SOC值,计算平均SOC后,根据各相SOC与平均值的差异来调整各相的功率,从而达成相间SOC均衡。
蓄电池充放电控制
蓄电池充放电控制是级联H桥储能系统的核心环节之一。它不仅要保障电池的安全充放电,还要结合SOC均衡控制来优化系统性能。在充电过程中,我们要避免过充,放电时防止过放。比如在实际代码中,可能会有如下逻辑来控制充电(以Python为例):
soc = 0.8 # 当前电池SOC
max_soc = 0.95 # 最大允许SOC
if soc < max_soc:
# 计算充电电流,这里简单示意根据SOC差值调整
charge_current = (max_soc - soc) * 10
# 执行充电操作,这里假设存在charge函数
charge(charge_current)
else:
# 达到最大SOC,停止充电
stop_charge() 上述代码根据当前SOC与最大允许SOC的比较,来决定是否充电以及充电电流大小,确保电池在安全的SOC范围内进行充放电。
级联H桥与dq坐标系下的PI解耦控制
级联H桥在dq坐标系下的PI解耦控制是提升系统性能的关键技术。根据参考论文中的控制方法,我们将三相静止坐标系下的物理量通过坐标变换转换到dq旋转坐标系下。在dq坐标系中,原本耦合的三相系统可以解耦为两个相互独立的分量进行控制。
假设我们已经将三相电流从abc坐标系转换到dq坐标系下得到id和iq,PI控制器就可以对这两个分量分别进行调节。以下是一个简单的PI控制算法示例(Python代码):
# 初始化PI控制器参数
kp = 0.5
ki = 0.1
integral_d = 0
integral_q = 0
reference_id = 1.0 # d轴电流参考值
reference_iq = 0.0 # q轴电流参考值
# 获取当前dq轴电流
current_id = 0.8
current_iq = 0.1
# 计算d轴PI控制器输出
error_d = reference_id - current_id
integral_d += error_d
output_d = kp * error_d + ki * integral_d
# 计算q轴PI控制器输出
error_q = reference_iq - current_iq
integral_q += error_q
output_q = kp * error_q + ki * integral_q上述代码通过设置PI控制器的比例系数kp和积分系数ki,根据dq轴电流的参考值与当前值的误差,计算出PI控制器的输出,进而可以用于控制级联H桥的相关参数,实现对系统的有效控制。
总之,级联H桥储能系统的SOC均衡控制、蓄电池充放电控制以及dq坐标系下的PI解耦控制,这些环节紧密相连,共同构建了一个高效、稳定的储能系统。不断探索和优化这些控制方法,将为储能领域的发展注入新的活力。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









