



 本文指导如何通过QGroundControl设置RC开关激活场外模式,配置随播计算机接口以实现MAVLink通信,以及介绍三种硬件设置方法:串行无线电、板载处理器和WiFi链接到ROS。适用于希望拓展无人机功能的开发者。
本文指导如何通过QGroundControl设置RC开关激活场外模式,配置随播计算机接口以实现MAVLink通信,以及介绍三种硬件设置方法:串行无线电、板载处理器和WiFi链接到ROS。适用于希望拓展无人机功能的开发者。
1、将RC开关映射到场外模式激活
在QGroundControl中加载参数并查找RC_MAP_OFFB_SW参数,您可以为其分配要用于激活板外模式的RC通道2
2、启用配套计算机界面
设置默认的随播计算机消息流TELEM 2,请设置以下参数:
- MAV_1_CONFIG =
TELEM 2(MAV_1_CONFIG通常用于映射TELEM 2端口) - MAV_1_MODE =
Onboard - SER_TEL2_BAUD =
921600
为了接收MAVLink,配套计算机需要运行一些与串口通信的软件。最常见的选项是:
- MAVROS与ROS节点通信
用于连接自定义代码的C / C ++示例代码MAVLink路由器(推荐)或MAVProxy路由MAVLink串行和UDP之间
3、硬件设置
3种设置板外通信的方法
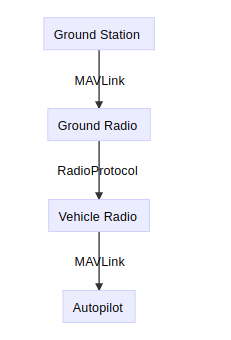
串行无线电
- 一个连接到自动驾驶仪的UART端口
- 一个连接到地面站计算机
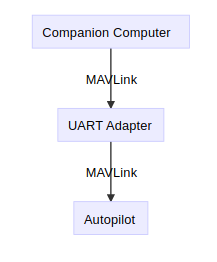
板载处理器
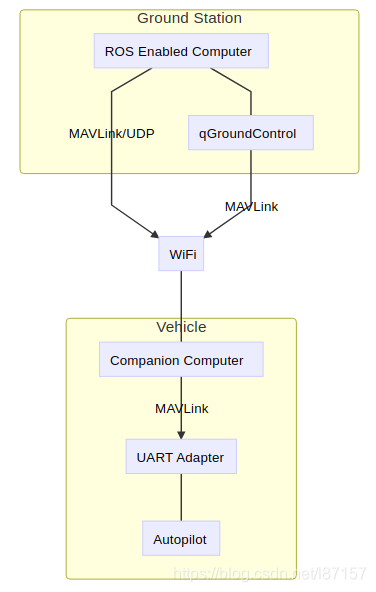
板载处理器和wifi链接到ROS

















 3995
3995

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









