 通用夹持器设计与应用
通用夹持器设计与应用




机器人应用中的通用夹持器设计与分析
摘要
通用夹持器是一种由橡胶膜包裹细粉尘材料组成的部件,用于抓取和装配。该夹持器特别适用于在广泛的应用中快速抓取和释放具有复杂几何形状的大量物体。由于各种形状和不同几何形状的物体难以抓握,表明其不适合应用于多种拾取与放置操作。本项目实现了一种低成本模块化夹持器,并进行了适当的机械设计、结构分析和实时分析。在此基础上,所设计的夹持器能够同时抓取多个零件,并在其状态下保持相对距离和相对协调。该通用夹持器作为真空管作用来抓取需要移动的物体。这种通用夹持器可以抓取多种物体,如鸡蛋、日用品、工业零部件、重型物体等,因此已开发出包含无定形夹持器的实验装置,并对抓取不同物品进行了仿真。测试和实验结果表明,所提出的通用夹持器已通过可行性方案验证。
关键词 :夹持器,颗粒,硅胶,真空腔,夹持机构
引言
对于终端用户而言,末端执行器或夹持器是机器人操作臂中的关键模块。它以有效的方式协助机器人的末端执行器,并使机器人能够部署物体[1]。近年来,末端执行器在自动化、医疗和食品加工行业等多个领域的不同任务中受到越来越多的关注[2]。在操作臂中,末端执行器在抓取动作中起着主要作用,即把物体从一个位置拾取与放置到另一个位置,而对于具有不同几何形状的物体而言,这对所有夹持器来说都是一个繁琐的过程[3]。为了解决这一问题,已经制造出柔性夹持器用于抓取复杂几何形状的物体。工业中使用的柔性夹持器被设计用于抓取具有最小张力的物体[4]。
通用夹持器被提出以取代能够抓取不规则形状几何物体[5]的柔性夹持器。它可用于具有最小以及最大张力的物体,甚至适用于具有最小厚度的物体。这类夹持器最近已被研究人员识别,并对其参数进行了分析,以有效应用于食品加工行业[6]。通用夹持器是可在工业操作臂中使用的标准夹持器,用于抓取工业物体。对通用夹持器的设计、建模和制造进行了分析,以减少在处理软性材料时的复杂性[7]。
为了执行末端执行器的不同操作,可以使用喷枪、锤子等工具,这些工具与工业机器人所使用的工具类似。末端执行器通常针对需要完成的机械化物料搬运任务进行设计,其中涉及将工件与所需位置进行连接。连接区域是机器潜力得以充分发挥的地方。腕部连接装置有两种类型的组件:即夹持器和工具[8]。
使用夹持器作为接口从根本上说是一个点对点过程,机器的工作由此得以进行。机械手的构造包含多个与作业相关的分类,在工业操作中可能需要仪器自身更换末端执行器。例如,在现场施工过程中,夹持器主要用于处理玻璃基材料[8]。夹持器是用于在工作空间中抓取物体和放置物体的装置。末端执行器运动的路径规划基本上是一个点对点运动过程[9, 10]。机械手的构造完全基于末端执行器在工业过程所需应用中的使用[11]。例如,在现场施工过程中,夹持器主要用于处理玻璃基材料[12]。本研究介绍了通用夹持器及其基本机制的详细概念。实际上,它描述了基于橡胶和颗粒材料选择,使用SolidWorks设计通用夹持器的过程[11]。该过程还解释了通用夹持器的工作原理以及采用咖啡粉和泡沫塑料球作为颗粒材料的几何抓取方法[13]。
通过本研究,可以建立夹持器材料的分析,以及在不同变化载荷下的应力、应变和位移的比较。本研究的主要创新在于提出了一种高效且独特的通用夹持器,适用于工业搬运应用,并可使用不同的颗粒材料。
2. 材料与方法
根据不同的应用,夹持器可分为以下几类:机械夹持器、磁力夹持器和真空夹具。在各种场合中,通常使用夹持器通过所需机构对物体进行机械夹紧,其中采用液压或气动驱动装置来抓取物体。工业中现有的不同类型的机构包括平行颚、交叉手指机构、收缩和伸缩型、仿人手型等,其中平行颚机构夹持器被广泛应用,通过方向可控的表面[14]来夹持物体。这类装置具有一到多个移动手指,可夹持不同物体,但不适用于软性材料。基于手指的夹持器通过颚板的尖端夹持部件。仿人手型通常需要三指结构,能够抓取和放置具有确定结构的物体。此类夹持器的工作方式与人手类似,目前主要在研究实验室中用于进一步开发。然而,工业上迫切需要具备多种物体处理能力的末端执行器,以适应不同物体的操作需求[15]。电磁原理是磁力夹持器用于夹持铁磁性部件的基本原理。这种夹持器仅适用于磁性材料,无法应用于多种类型的物体[16]。
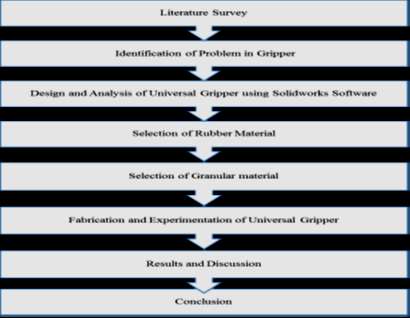
最常见的夹持器称为真空夹具,其吸盘用于对指定物体执行抓取动作,真空由泵通过真空喷射器产生。它主要用于屋顶、室内照明和外墙装配、门以及窗户装配。真空夹具广泛应用于从柔软的柔性包装到软性物料搬运操作的各种场景,但最常见的是处理光滑、平坦且坚固的物体。这种夹持器采用软橡胶、塑料或弹性吸盘(真空吸盘)来实现拣选物体,从而确保被处理的产品不受损坏[17]。在当前情况下,对不规则形状和尺寸的软材料进行物料搬运较为困难。通用夹持器的主要原理是通过颗粒材料实现物体的阻塞,并随之改变与物体相关的形状。填充有颗粒材料的橡胶袋是夹持器的支撑部分。橡胶材料袋内填充有类似沙子的多孔材料[13]。向橡胶袋中通入压缩空气以使其动作变软。然后将球体推向目标的相反方向。根据几何形状通过压缩球体实现对目标的过渡。该方法引导夹持力集中以抓取物体。本研究采用实时实验装置,分析通用夹持器在不同颗粒材料下的夹持力变化。如图所示的流程图说明了分析过程中涉及的步骤。该项目的方法论设计如下图1所示。

2.1 真空吸盘的选择
为了安全地抓取工件,理论上计算了吸盘所需产生的吸力。同时考虑了大气条件和夹持器的应用。
选择吸盘所需的因素包括
- 应用
- 材料
- 表面
- 形状
- 内部体积
- 材料
- 环境
表1中讨论了真空压力与大气压力的比较。
| 真空百分比 | 毫米汞柱 | Bar | Psi |
|---|---|---|---|
| 10 | 76.92 | 0.1 | 1.47 |
| 20 | 153.85 | 0.2 | 2.84 |
| 30 | 230.77 | 0.3 | 4.41 |
| 40 | 307.69 | 0.4 | 5.88 |
| 50 | 384.62 | 0.5 | 7.35 |
| 60 | 461.54 | 0.6 | 8.82 |
| 70 | 538.46 | 0.7 | 10.29 |
| 80 | 615.38 | 0.8 | 11.76 |
| 90 | 692.31 | 0.9 | 13.23 |
| 100 | 769.23 | 1 | 14.70 |
2.2 使用SolidWorks设计夹持器
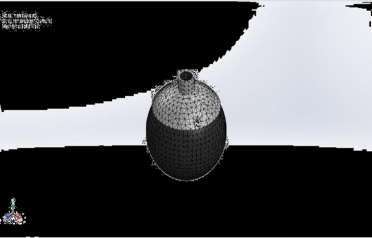
该夹持器使用SolidWorks软件设计,如图2所示,并针对多种载荷进行了应力应变分析。
夹具采用ABS塑料材料设计,夹持器气囊则采用天然橡胶和乳胶橡胶设计。已进行多种分析,以全面展示夹持器设计与分析的结果。
3. 实验
通用夹持器基于“堵塞”过程工作。当颗粒状材料如咖啡粉被压缩进橡胶材料袋时,会变得非常坚硬,如图所示。随着压力增加,多孔颗粒之间的接触减少,从而有助于夹持工件。这在搬运鸡蛋和软性材料时可以观察到。将咖啡颗粒制成的真空压缩袋尽可能紧密地进行过渡时,印记仍保持不变。若用细粉末颗粒替代粗咖啡颗粒,在施加压力时有可能导致袋子破裂。实验还测试了坚果、谷物、大米等细多孔材料。实验使用工业机械手ABB IRB 1410对带真空吸盘的通用夹持器模型进行测试,如图3所示。压力被控制使用与ABB IRB1410末端执行器的压缩机管路FRL单元相连的压力调节器。
乳胶橡胶材料袋中填充有咖啡渣,如图所示,并连接到气管上。施加最小压力后,袋内材料会相应地定位。当按压材料袋接触工件时,多孔材料移动并形成特定结构。咖啡渣的压缩固定住物体,同时橡胶材料袋也有助于抓持物体。橡胶夹持器中填充有粗磨咖啡颗粒,并连接到机械手的手腕部分。漏斗插入另一端,然后将少量多孔材料倒入材料袋中。移除漏斗后,材料袋部分充气,使咖啡渣下沉至袋底。
机器人应用中的通用夹持器设计与分析
3. 实验(续)
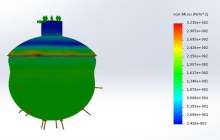
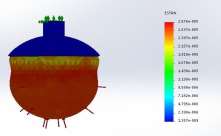
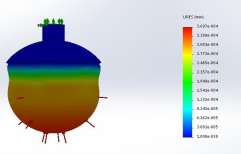
对夹持器在不同载荷条件(如10 N/m², 20 N/m², 30 N/m²)下的应力、应变和位移进行了分析,以检查其稳定性和变形情况,如图5所示。当空气缓慢排出后,多孔材料将被保留在材料袋内。随后,在插入漏斗后加入咖啡颗粒,并重复该过程。定期检查漏斗尺寸,橡胶袋需与漏斗边缘贴合约一英寸以执行操作。若橡胶材料袋中的咖啡渣已足够,则将橡胶材料袋从管子中取出,使咖啡渣保留在橡胶材料袋内部。放置一小块织物作为粗滤器,以防止颗粒掉落。使用具有良好透气性的织物以便空气进出。然后对橡胶部分充气,使颗粒松动并相应定位。接着轻轻将橡胶材料袋按压在物体表面。此时从橡胶材料袋中抽出空气,从而实现对物体的夹持。
当对物体施加最大按压力时,橡胶材料袋会发生变形,如图4所示。

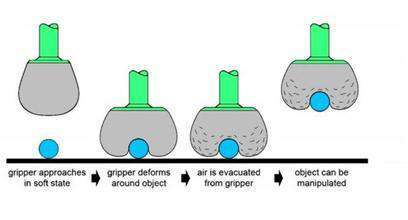
当施加吸力以夹持物体时,橡胶材料袋会自身收缩。在释放吸力时,橡胶材料会对物体产生挤压作用。这是如图6所示的拾取与放置应用所遵循的原理。当真空被压缩时,物体将与真空袋牢固接触。通过逐渐释放吸力压力可实现放置操作,随后物体将在夹持器中被放置并脱离。
如果强力吹入空气进入橡胶材料袋,则夹持器将强力弹出物体,如图7(a)和(b)所示,这些是处理水瓶和瓶盖时的夹持器动作示例。
 10 N/m²下的应力 b) 10 N/m²时的应变 c) 10 N/m²时的位移 d) 20 N/m²时的位移 夹持器的仿真)
10 N/m²下的应力 b) 10 N/m²时的应变 c) 10 N/m²时的位移 d) 20 N/m²时的位移 夹持器的仿真)
 . 夹持器抓取水瓶)
. 夹持器抓取水瓶)
 . 夹持器抓取瓶子 cap)
. 夹持器抓取瓶子 cap)
4. 结论
本文设计并制造了一种通用夹持器,用于抓取和移动各种材料。该真空诱导夹持器在过渡过程中通过锁紧与解锁机制,实现了对不同几何形状物体的处理操作。研究表明,选用合适的颗粒和橡胶材料可提升其性能。这种夹持动作方式也表现出良好的可靠性。采用气锁结构的夹持器为不同的物料搬运环境提供了所需潜力。机器人技术的未来取决于末端执行器的构成,以及是否具备灵活的处理选项和更易获取的物体。无论物体形状如何,通用夹持器均可用于抓取不同物体。此项创新已在食品加工、国防工业、物料搬运、家庭和商业场所等多个领域引起广泛关注。所设计夹持器的主要任务已成功实现,即抓取各种物体。从而有效提高了工业领域的生产率,降低了成本和提升了性能。

















 2258
2258

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









