



移动代理的能量收集
摘要
无线传感器网络(WSNs)已广泛应用于许多不同领域,包括民用和军事领域。来自网络的感知数据种类繁多,传输可能消耗大量能量。因此,部署具有高容量的移动传感器以支持静态传感器,应对较长距离的通信,并在可能的情况下为传感器提供无线供电。本文聚焦于一种适用于无线传感器网络中移动代理或传感器节点的能量收集(EH)设计。一种混合能量收集系统能够从周围环境中收集能量,以为移动传感器和静态传感器供电。此外,这些移动传感器在需要时可向传感器进行无线能量传输。我们提供了利用射频(RF)和太阳能进行能量收集的不同场景,以支持设备运行。文中特别给出了基于数学方程设计的全部电路。同时提供了仿真与实验结果,以阐明网络中的各种场景。结果表明该方案具有良好的前景和实用性。
关键词 :能量收集;混合射频‐太阳能;移动代理;传感器节点;无线传感器网络
引言
近年来,无线传感器网络(WSNs)在民用和军事领域的许多应用中发挥了重要作用(Lai 等人,2022; Pragadeswaran, Madhumitha 和 Gopinath 2021)。网络已被广泛研究和开发,以满足在恶劣条件下实际应用日益增长的需求。随着工业4.0技术的发展,无线传感器网络(WSNs)正变得越来越普及,并已应用于人类生活的诸多领域(Kandris等,2020)。存在多种类型的传感器以适应不同的应用需求,但我们可以将其主要分为两类:移动传感器和静态传感器(Hutchinson, Oh, 和 Chen 2017)。静态传感器通常体积小、成本低且计算能力有限(De Freitas等,2011),而对传感器节点进行电池更换或维护非常困难。因此,节约能量以延长网络寿命一直是这类网络的关键问题。
多媒体无线传感器网络由于需要采集和发送图片、视频等高容量数据至基站(BS)或数据处理中心,面临着较大的能耗负担(Hao et al. 2015;Nguyen, La, 和 Teague 2015)。这种多媒体方法相比传统无线传感器网络消耗更多能量,导致许多传感器节点迅速耗尽预充电池的能量,从而使网络很快断开连接(Nguyen et al. 2021)。为解决此类网络的节能问题,已有多种高效能量方案被提出。已提出的高效能量数据路由算法包括基于簇的(Nguyen 和 Rahnavard 2013)、基于树的(Nguyen 和 Teague 2014)、随机游走(Nguyen 2013)等,以降低传输成本。这些方法可与某些数据处理机制结合,减少数据传输,从而节约无线传感器网络的能耗(Kim, Jeon, 和 Park 2013;Nguyen, Teague, 和 Rahnavard 2014)。此外,一些研究提出了数据处理算法,用于消除网络中的冗余数据,显著降低网络能耗,延长网络寿命(Do et al. 2021)。提升电池性能以及缩短充电时间,可使设备运行更持久且更高效率,如文献(Nguyen et al. 2020;Quyen et al. 2020)所述。另一种节能方向是从周围环境中收集能量,为传感器节点供电。传感器可以从多种资源(如太阳能)、振动、风、无线电频率等,以实现自给自足(Tran 等,2022)。然而,采集到的能量可能不足以支持传感器在所有任务中的需求,包括感知和通信。
移动代理或移动传感器被认为可以协助无线传感器网络,因为它们能够移动到静态传感器感知范围无法到达的区域(Nguyen,2020)。此外,它们具有处理长距离通信的高能力,并且配备大容量可充电电池以支持运行。最后但同样重要的是,移动代理可以为传感器节点提供无线电力。
大多数关于使用移动代理来支持无线传感器网络的框架都集中在提出一些低功耗设备,并利用大容量电池来延长设备寿命(Gandhimathi 和 Murugaboopathi,2021;Nguyen 和 Teague,2015)。由于移动代理相较于传感器节点具有更高的外形,因此有很大可能可以从周围环境外部的可再生能源获取并补充电池能量。为了延长传感器节点的工作时间,我们提出使用移动代理在收集数据的同时,通过无线电力传输为传感器节点提供电力。当传感器节点处于移动代理的通信范围内时即可实现。此外,本文还提出了用于执行能量采集或能量转换功能的电子电路。
如上所述,无线传感器网络中的能量问题始终是一个非常重要且令人关注的议题,这促使我们提出一种系统,用于收集、提供和补充传感器节点的能量。在本方案中,我们使用移动代理同时采集数据并向传感器节点传输能量,如图1所示。因此,我们设计了一种集成于每个移动机器人的混合太阳能和射频能量收集系统。对于传感器节点,我们仅设计了一种用于收集射频能源的系统,这些射频能源来自移动代理以及周围环境中频率为900 MHz的射频源。移动代理将沿预定轨迹移动,在确保与传感器节点通信范围的前提下,从传感器节点接收数据,并通过远场无线电力传输(WPT)技术向传感器节点传输能量。
本文其余部分组织如下。问题描述部分介绍了问题的提出。所提系统的详细电路设计在电路设计中进行了描述。仿真结果展示了系统中设备充电过程的仿真结果。最后,结论与未来发展方向部分概述了结论与未来发展方向。
问题描述
在本节中,我们为射频和太阳能能量收集机制提供了框架。系统模型如图1所示。在该模型中,我们为移动代理支持无线传感器网络提供了两种可能。以下是两种常见的能量收集方法。
射频能量收集
天线是一种能够辐射或接收电磁波的电子设备。其主要功能是将发射器的射频信号作为无线电波辐射出去,或在接收器处将无线电波转换为射频信号进行处理。天线的另一个功能是将定向辐射能量指向一个或多个期望的方向。每个天线在设计时都会工作在特定的频率范围内,例如工作在2.4 GHz、900 MHz和1800 MHz频段的天线。本文中,我们使用工作在900 MHz频率带的天线。
阻抗匹配
阻抗匹配是在负载和传输线之间使用匹配电路。该阻抗匹配电路被设计成使得输入阻抗等于传输线的阻抗。这样,波在传输线中的反射将不再存在。
阻抗匹配的目的是在负载上获得最大功率,同时最小化传输线上的功率损耗。有许多阻抗匹配方法,例如使用波导;使用集总元件L(电感)、C(电容);使用 λ/4耦合器;使用多段耦合器。本文采用使用L、C集总元件的方法进行阻抗匹配,如射频能量收集中所示。
倍压电路
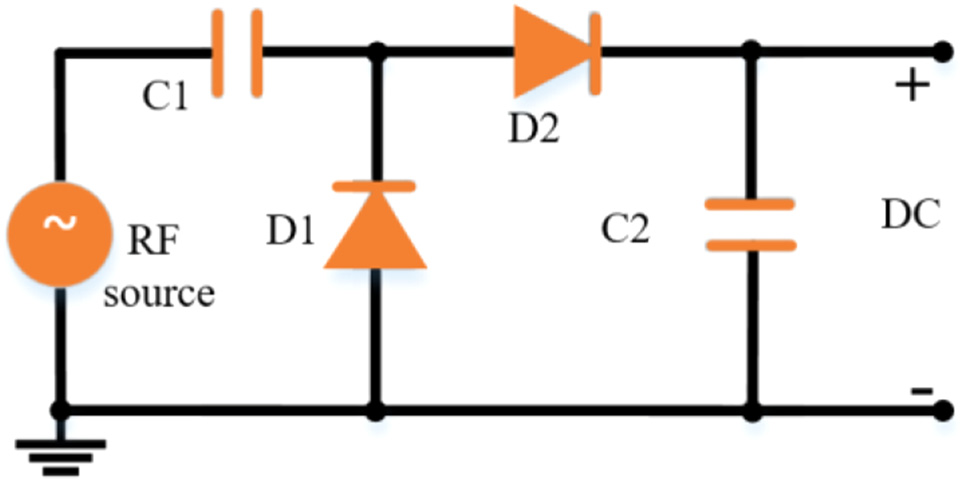
该电路的一个有趣特性是当这些级数串联时。电路的输出电压将会增加,就像我们将电池串联以获得更高的输出电压一样。图2显示了一个具有一个级数的倍压电路。
每个带有倍压电路的独立级可以被视为一个开路输出电压为V0的单电池。当多个级数(n 级)串联连接时,倍压电路的输出电压将根据公式(1)进行计算。
$$
V_{out} = \frac{nV_0}{nR_0 + R_L} = V_0 \left(\frac{1}{\frac{R_0}{R_L} + \frac{1}{n}}\right)
$$
其中,$R_L$为负载电阻,$R_0$为内阻,$V_{out}$为输出电压,$V_0$为开路输出电压。

太阳能采集
每种特定天气条件下仅存在一个最大功率点,此外,当天气条件变化时,最大功率点也会随之改变。因此,为了优化太阳能电池板的性能,必须始终让太阳能电池板工作在最大功率点。MPPT(最大功率点跟踪器)将执行该任务控制如图3所示的DC/DC转换器的开关阀的开启和关闭。
假设PMT板直接连接到一个纯电阻负载,如图4所示。太阳能电池板的工作点是其I‐V特性与负载I‐V特性的交点。当考虑纯电阻负载时,负载曲线变为斜率为 1/R的直线。假设有三个负载值R1,、R2,和R3,,对应的三条I‐V曲线的斜率分别为1/R1, 1、1/R2, 1、1/R3。其中,只有对应的负载曲线R2与太阳能电池板的I‐V曲线在最大功率点相交,如图5所示。
因此,对于具有R2值的负载,太阳能电池板将在最大功率点MPP处工作,但这只是随机发生。当天气条件变化或负载波动时,MPPT单元将根据负载匹配原则始终跟踪最大功率点。
当太阳能电池板直接连接到负载时,工作点将由负载特性决定,当负载的值与$R_{MPP} = V_{MPP}/I_{MPP}$的值相等时,从太阳能电池板传输到负载的功率将达到最大,其中$R_{MPP}$为对应于最大功率点的电阻,$V_{MPP}$ 是最大功率点处的电压, $I_{MPP}$ 是最大功率点处的电流。
在DC/DC转换器中,升压转换器被广泛应用。本文将重点研究一种升压转换器;使用升压转换器的太阳能板系统如图6所示。
升压转换器的关系方程如下所示:
$$
\frac{V_t}{V_{PV}} = \frac{1}{1 - D} \quad (2)
$$
$$
\frac{I_t}{I_{PV}} = 1 - D \quad (3)
$$
$$
V_t = R_t I_t \quad (4)
$$
其中$V_{PV}$:太阳能电池的输出电压(伏特); $I_{PV}$:太阳能电池板的输出电流(A); $V_t$:负载上的输出电压; $I_t$:负载上的输出电流; $D$:转换器调制因子; $R_t$:负载电阻。
$$
V_t = \frac{V_{PV}}{1 - D}; \quad I_t = I_{PV}(1 - D) \quad (5)
$$
$$
\frac{V_{PV}}{I_{PV}} = R_t(1 - D)^2 \quad (6)
$$
$$
R_{td}(D,R_t) = \frac{V_{PV}}{I_{PV}} \quad (7)
$$
$$
R_{td}(D,R_t) = R_t(1 - D)^2 \quad (8)
$$
由公式(8)可知,$R_{td}(D,R_t)$取决于升压转换器的调制因子D以及负载$R_t$的值。因此,通过改变调制因子D,可以改变$R_{td}$的值。
系统的工作点是太阳能电池板的I‐V曲线与负载的 I‐V特性的交点,如图7所示。
从图7可以确定负载特性的倾斜角如下
$$
\theta_{Rtd}(D,R_t) = \arctan\left(\frac{1}{(1 - D)^2 R_t}\right) \quad (9)
$$
通过改变倾斜角来改变工作点的位置,意味着改变转换器调制因子D。适当改变D将获得在正确最大功率点处建立的两条特性曲线的交点。




电路设计
该方案的详细结构如图8所示,可在此处找到。最终目标是产生一个直流电源,可插入充电器以对电池进行充电。为实现这一目标,我们将采用不同的方法和途径来收集每种能量源。图8表明,为了将电压提升至所需的18.5伏特,太阳能源采用了MPPT算法和升压转换器。射频能量源从环境中900 MHz的频率范围内获取,经过转换电路后获得5伏特的直流电压,对应于五个串联连接的级数。接下来的几个段落将逐步详细介绍系统组件的设计过程。
射频能量收集
匹配
本文通过使用电感(L)和电容(C)等元件来实现阻抗匹配。
我们假设阻抗匹配电路的设计要求是在900 MHz下工作,源阻抗为$Z_S = 50\ \Omega$,负载阻抗为$Z_L = 50 - 60j\ (\Omega)$,线路阻抗为$Z_0 = 50\ \Omega$。史密斯图用作计算参数L和C的基础。
根据图9中提供的信息,我们确定S参数的频率步进为0.1 GHz,起始频率为0.1 GHz,终止频率为2 GHz。
仿真结果表明,在点m1处900 MHz的谐振频率等于 900 MHz,衰减因子分贝(S(1,1)等于 −71.5 dB);在史密斯图中,谐振点位于Z = 50 Ω,频率等于900 MHz,阻抗等于$Z_0 (1 - j5.2E−4)$,因此该电路已实现阻抗匹配。信号从输入端传输到输出端无损耗。根据史密斯图,获得的阻抗$Z_0 (1+ 0j)$符合预期,当输入与特征阻抗$Z_0$结合时,反射降至零,如图10所示。



倍压电路
图11显示了射频能量通过一个阻抗匹配电路。该能量随后将进入下一个电路,即整流器,其中能量将从交流电源转换为直流电源。电路的级数与输出电压成正比。在本研究中,我们使用了一个串联连接的五级流水线。
图12显示了射频能量收集系统的输出电压。电路的输出电压取决于串联连接的级数。电路中,黑线表示仅有一个阶段时电路的输出电压。接收到的输出电压为1.43伏特,并在30秒后趋于稳定。红线是电路中三个级数串联时的输出电压,在30秒后电压稳定在3.2伏特。蓝线是电路中五个级数串联时的输出电压,在30秒后达到5.06伏特。


太阳能采集
最大功率点跟踪算法的构建与仿真过程如图13所示。
图14显示了未使用MPPT算法时太阳能电池板的功率,以蓝线表示。使用MPPT算法时太阳能电池板的功率为红线。我们注意到,当使用MPPT算法时,输出功率将始终在最大功率点附近波动,且波动范围远小于未使用MPPT算法的情况,从而使输出功率更加稳定。如图14所示,系统输出功率在约5.6(瓦)的峰值功率点附近波动。
然而,太阳能系统的缺点是它高度依赖周围环境条件。因此,我们需要结合另一种对环境条件依赖较小的能源,即射频能量。


充电系统
我们构建了如图15所示的详细充电电路。LM317是该充电电路的关键元件,也是我们为其设计的电路之一。
LM317是一种电压调节集成电路。集成的引脚1(ADJ)是控制引脚,用于控制充电发生的电压。充电电压显示在输出引脚上,该引脚称为引脚2(VO)。稳压直流电源连接到输入引脚,该引脚由符号“VI”标识,位于引脚3。可以将输出电压调节至近40伏特。LM317的工作电压范围为1.25至37伏特,最大输出电流为1.5安培,其内阻可低至0.05 Ω。
由于LM317只能提供最大1.5 A的输出电流,因此我们必须使用晶体管Q2来放大电流,从而获得更高的充电电流,使电池充电过程更快。变阻器和电阻R2分别用于控制充电电压和充电电流。

仿真结果
传感器节点充电系统
使用传感器节点时,我们仅利用射频功率为电池供电。因此,图16中所示的直流电源目前仅来自射频能量收集系统的输出。传感器节点充电系统如图16所示。
对于传感器节点,由于能耗较低,我们只需设计一个射频能量采集系统。然而,电流非常小,因此必须通过电流升压器和充电系统来缩短电池的充电时间。
充电过程针对传感器节点,我们使用容量为2安时的电池,充电电流为1.5安培,充电电压为3伏特。当电池的充电状态(SoC)为 ≤50%时,电池开始充电。在$t = 3700$秒时,电池的充电状态达到80%,并采用电流源(恒流充电)。如图17所示,在$t = 4500$秒时,电池的充电状态达到100%,并采用电压源(恒压充电)。

移动代理的充电系统
与传感器节点不同,我们的移动代理采用了一种结合了太阳能和射频能量的能量采集系统。移动代理需要非常高的充电电流和充电电压,因此单个射频电源难以满足其充电电流需求。此外,太阳能高度依赖于环境条件。因此,我们需要将这两种能源结合起来为移动代理充电。因此,图16所示图中的直流电源现在将由混合射频‐太阳能能量收集系统的输出电压替代,如图18所示。
电流为6.8安培,当其通过充电系统的输出端后,电压将达到20伏特。
图19描述了系统中设备的充电过程。我们使用一块容量为7.66安时的电池与移动机器人配合。充电电流为6.8安培,充电电压为20伏特,当充电状态降至50%时,电池开始重新充电。电池充电流程包括两个阶段:第一阶段,从时间 $t = 0\ \text{s}$ 到时间 $t = 2600\ \text{s}$,电池由电流源进行恒流充电(CC Charge)。当充电状态达到80%时,电池进入第二阶段的充电。换句话说,该过程发生在 $t = 2600$ 和 $3000$ 秒之间,如图19所示。使用电压源对电池进行充电的阶段(恒压充电)。此阶段对于使电池的充电状态达到100%是必要的。
在表1中,我们对所提出的方法与一些传统方法在混合能源系统、独立太阳能系统和独立射频能源系统的电流(I)和电压(V)方面进行了比较。我们的主要关注点是对混合能源系统的参数进行分析。首先,关于电压,应注意的是,所有这些方法都能够产生非常接近电池所需电压的输出值。其次,关于电流,我们建议的方法达到了6.8 A的值,明显高于其他方法达到的0.75 A。如上所述,电池的充电时间在很大程度上取决于充电电流,因此提高充电电流的值具有重要意义。


| 方法 | $V_{\text{Solar}}$ | $V_{\text{RF}}$ | $V_{\text{Hybrid}}$ | $I_{\text{Hybrid}}$ |
|---|---|---|---|---|
| Jadhav 和 Lambor (2017) | 5 V | 5 V | 12 V | 0.75 A |
| Singh 等 (2018) | 6.1 V | 2.24 V | 7.8 V | None |
| 本研究 | 18 V | 5.06 V | 20 V | 6.8 A |
表1:比较结果。
结论与未来发展方向
本文提出了一种用于移动代理和传感器节点等设备的高效能量收集系统。我们详细阐述了针对不同功耗设备的设计问题,以相应地使用能量。我们提出的系统能够产生相当高的充电电流 $I = 6.8\ \text{A}$。因此,可以显著缩短电池的充电时间。当电池的SoC(充电状态)参数降至50%时,系统将启动电池的充电过程。因此,该系统的工作可延长网络中设备的工作时间。
然而,为了提高从环境中收集能量过程中的效率,我们需要更加关注提高射频能量到直流电的转换效率。在MPPT算法的应用中使用人工智能技术等新技术将带来更高的效率。

















 61
61

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









