







 本文探讨了时间最优的MPC算法,包括非均匀和均匀网格版本,以及超图在表示系统耦合关系中的应用。文章详细解释了边界值问题、初始值问题和数值分析的概念,以及打靶法和稀疏矩阵在MPC中的作用。此外,还介绍了正则化在优化中的运用,以及MPC中的闭环控制和超图在优化问题中的表示方法。
本文探讨了时间最优的MPC算法,包括非均匀和均匀网格版本,以及超图在表示系统耦合关系中的应用。文章详细解释了边界值问题、初始值问题和数值分析的概念,以及打靶法和稀疏矩阵在MPC中的作用。此外,还介绍了正则化在优化中的运用,以及MPC中的闭环控制和超图在优化问题中的表示方法。
参考
Uniform Grid Time-Optimal MPC 论文
Non-Uniform Grid Time-Optimal MPC 论文
Time-Optimal MPC and Hypergraph 论文
数学概念来自 wiki
Mpc local planner 相关算法
其实在 README.md 文件中已经写了的:
- Standard MPC and Hypergraph,标准 MPC 和超图
C. Rösmann, M. Krämer, A. Makarow, F. Hoffmann und T. Bertram: Exploiting Sparse Structures in Nonlinear Model Predictive Control with Hypergraphs, IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), New Zealand, July 2018.
-
Time-Optimal MPC and Hypergraph,时间最优 MPC 和超图
C. Rösmann: Time-optimal nonlinear model predictive control, Direct transcription methods with variable discretization and structural sparsity exploitation. Dissertation, Technische Universität Dortmund, Oct. 2019.
-
Uniform Grid Time-Optimal MPC,统一网格时间最优 MPC
C. Rösmann, F. Hoffmann und T. Bertram: Timed-Elastic-Bands for Time-Optimal Point-to-Point Nonlinear Model Predictive Control, European Control Conference (ECC), Austria, July 2015.
C. Rösmann, F. Hoffman und T. Bertram: Convergence Analysis of Time-Optimal Model Predictive Control under Limited Computational Resources, European Control Conference (ECC), Denmark, June 2016.
-
Non-Uniform Grid Time-Optimal MPC,非均匀网格时间最优 MPC
C. Rösmann, A. Makarow, F. Hoffmann und T. Bertram: Sparse Shooting at Adaptive Temporal Resolution for Time-Optimal Model Predictive Control, IEEE Conference on Decision and Control (CDC), Australia, December 2017.
C. Rösmann, A. Makarow, F. Hoffmann und T. Bertram: Time-Optimal Nonlinear Model Predictive Control with Minimal Control Interventions, IEEE Conference on Control Technology and Applications (CCTA), Hawai'i, August 2017.
数学概念
超图 Hypergrapher
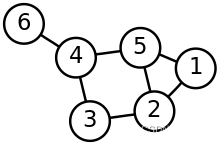
图就是顶点(元素) vertex 和边(元素间的关系) edge 组成。
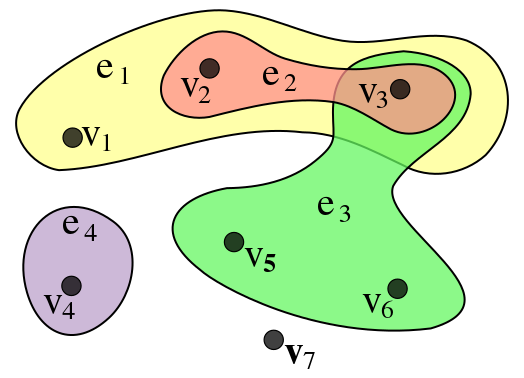
超图是图的概括,其中边可以连接任意数量的顶点。
在普通图中,边恰好连接两个顶点,一般用连线表示,例如图 fig.1。
在超图中,由于边可以连接多个顶点,可以表示耦合的关系,一般用曲线把顶点圈起来,例如图 fig.2。
边界值问题 Boundary value problem 和初值问题 Initial value problem
边界值问题的条件指定在方程中自变量的极值(“边界”),边界值是系统指定的最小或最大输入情况下、系统内部或者系统输出相对应的数据值。
e.g.
在“时间 - 位移”系统 s=f(t) ,t ∈[0, 5] 中,有系统属性例如固定的加速度 a = 1 和初始速度 v = 0,系统输出位移 s。
边界值问题就是在 t=0 和 t=5 条件下的系统属性 a,v,s 数值问题。
而初始值问题的所有条件指定在自变量值不变的情况下,并且该值位于下边界,因此称为“初始”值。初值问题经常在微分中出现。
e.g.
在“时间 - 位移”系统 s=f(t) ,t ∈[0, 5] 中,有系统属性例如变化的加速度 a 和初始速度 v = 0,系统输出位移 s。
初值问题是系统在 t=0 时刻,系统属性 a,v,s 的数值问题。
由于加速度 a 是变化的,对系统的观察一般是在极端时间区间 [t0, t0+ε] 内,认为在 ε 时间内,系统状态完全处于 t0 时刻的状态。
数值分析 Numerical analysis
研究连续问题算法的科学。目的是将连续无穷维的问题离散化, 得到一个离散的有限维的可解问题, 进而得到近似解。
例如求一个函数的积分是一个连续模型的问题,若将其离散化变成数值积分,就变成将上述面积用许多较简单的形状(如长方形、梯形)近似,因此只要求出这些形状的面积再相加即可。
打靶法 Shooting method
在数值分析中,打靶法是一种通过将边值问题简化为初值问题来求解的方法。它涉及在不同的初始条件下寻找初值问题的解,直到找到满足边值问题的边界条件的解。通俗地说,就是从一个边界向不同方向“射出”轨迹,直到找到“击中”另一边界条件的轨迹。
e.g.
直线运动中,系统初始位移为 0 (边界其一),通过假设速度 v = [1, 2, 3, ..., 100] 等不同的速度(不同条件/不同方向打靶),使得系统在第 5 秒位移为 56 (边界其二)。这个系统中,加速度是不确定的,为了简化问题,把系统直线运动的这 5 秒中的全部条件认为同初始条件一致(边界问题转为初值问题),求解出初始条件在不同速度,不同加速度情况下,系统在 5 秒内位移 56 的解。
控制优化问题 OCP (optimal control problem)
非线性规划 NLP (Nonlinear Programming)
非线性规划,求解具有非线性约束的优化问题
最优化问题
损失函数或成本函数是指一种将一个事件(在一个样本空间中的一个元素)映射到一个表达与其事件相关的经济成本或机会成本的实数上的一种函数,借此直观表示的一些"成本"与事件的关联。一个最佳化问题的目标是将损失函数最小化。一个目标函数通常为一个损失函数的本身或者为其负值。当一个目标函数为损失函数的负值时,目标函数的值寻求最大化。
有限差分 Finite difference
有限差分是 f (x + b) − f (x + a) 形式的数学表达式。如果有限差分除以 b − a,就会得到差商,也就是在区域 [a, b] 内的导数。
稀疏矩阵 Sparse matrix 和稠密矩阵 Dense matrix
在数值分析和科学计算中,稀疏矩阵或稀疏数组是大多数元素为零的矩阵。对于稀疏矩阵的零值元素比例没有严格的定义,但一个常见的标准是非零元素的数量大致等于行数或列数。相反,如果大多数元素非零,则矩阵被认为是稠密的。
从概念上讲,稀疏矩阵对应于几乎没有成对相互作用的系统。而稠密矩阵则反映了系统内复杂的相互作用。
在计算机上存储和操作稀疏矩阵时,如果使用标准稠密矩阵结构和算法的运算速度缓慢且效率低下,因为处理和内存都浪费在零上。稀疏数据本质上更容易压缩,因此需要的存储量要少得多。
e.g.
以球 A,球 B 为一个系统,AB 互不相关。球 A 以恒加速度 aA,初始速度 vA 运动,球 B 以恒加速度 aB,初始速度 vB 运动,它们的位移是 sA,sB。那么这个系统有
球 A 位移
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 6672
6672

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









