







 本文概述了FAST-LIO、FAST-LIO2和Faster_LIO三种滤波器SLAM算法的贡献,强调了它们在计算效率、精度提升和数据结构优化方面的改进,如激光雷达-惯性融合、直接点云注册和新型数据结构iVox的应用。
本文概述了FAST-LIO、FAST-LIO2和Faster_LIO三种滤波器SLAM算法的贡献,强调了它们在计算效率、精度提升和数据结构优化方面的改进,如激光雷达-惯性融合、直接点云注册和新型数据结构iVox的应用。
近期,阅读了FAST-LIO、FAST-LIO2以及Faster_LIO论文,这三篇论文都属于滤波器的SLAM算法,下面记录一下三个工作的主要贡献和不同。
FAST-LIO
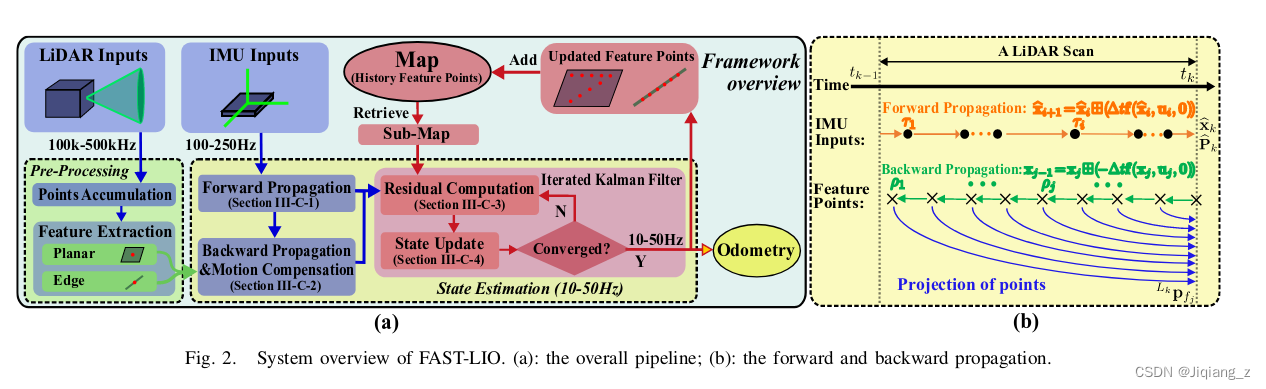
1.提出了一种计算效率高、鲁棒性强的激光雷达-惯性里程测量框架。使用紧密耦合的迭代扩展卡尔曼滤波器将激光雷达特征点与 IMU 数据融合,从而在快速运动、噪声或杂乱环境中实现稳健导航。
2.为了降低大量测量时的计算负荷,提出了一种计算卡尔曼增益的新公式。新公式的计算负荷取决于状态维度而非测量维度。
FAST-LIO2
基于FAST-LIO,FAST-LIO2主要有两点贡献:
1.第一项是直接将原始点注册到地图上(随后更新地图,即制图),用而无需提取特征。这样可以利环境中的细微特征,从而提高精度。
2.第二个主要创新点是通过增量 k-d 树数据结构(ikd-Tree)来维护地图,从而实现增量更新(即点插入、删除)和动态再平衡。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 2190
2190

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











