







 本文介绍了欧拉角在右手坐标系中的概念,着重讲解了Eigen库中的eulerAngles函数如何将旋转矩阵转换为Z-Y-X(RPY)顺序的欧拉角。同时,针对九轴IMU输出的欧拉角顺序和应用场景进行了说明。
本文介绍了欧拉角在右手坐标系中的概念,着重讲解了Eigen库中的eulerAngles函数如何将旋转矩阵转换为Z-Y-X(RPY)顺序的欧拉角。同时,针对九轴IMU输出的欧拉角顺序和应用场景进行了说明。
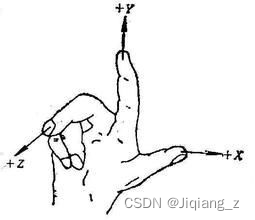
欧拉角方向
以右手坐标系为例,大拇指表示X轴,食指表示Y轴,中指表示Z轴。
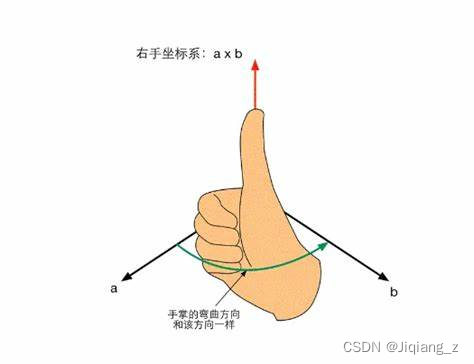
大拇指朝向某个轴的正方向,手掌弯曲的方向即为某个轴欧拉角的正方向。
Eigen库中eulerAngles函数
旋转矩阵转欧拉角(Z-Y-X,即RPY)
Eigen::Vector3d eulerAngle=rotation_matrix.eulerAngles(2,1,0);eulerAngles(a, b, c),3个形参中a代表第一个旋转轴、b代表第二个旋转轴、c代表第三个旋转轴。
这个函数中,数字2表示Z轴,1表示Y轴,0表示X轴 ,eulerAngles(2,1,0)就表示旋转顺序为ZYX。
eulerAngle(0) 表示绕第一个轴的旋转角度。
eulerAngle(1) 表示绕第二个轴的旋转角度。
eulerAngle(2) 表示绕第三个轴的旋转角度。
例1:旋转顺序为:Z-Y-X (Y-P-R)
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 1386
1386

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











