#include <iostream>
#include <opencv2/opencv.hpp>
int main()
{
cv::Mat img, output; // img 输入图像 ; src 最终输出的图像
cv::Mat map_x, map_y,map_xy;
img = cv::imread("../fg2.bmp");
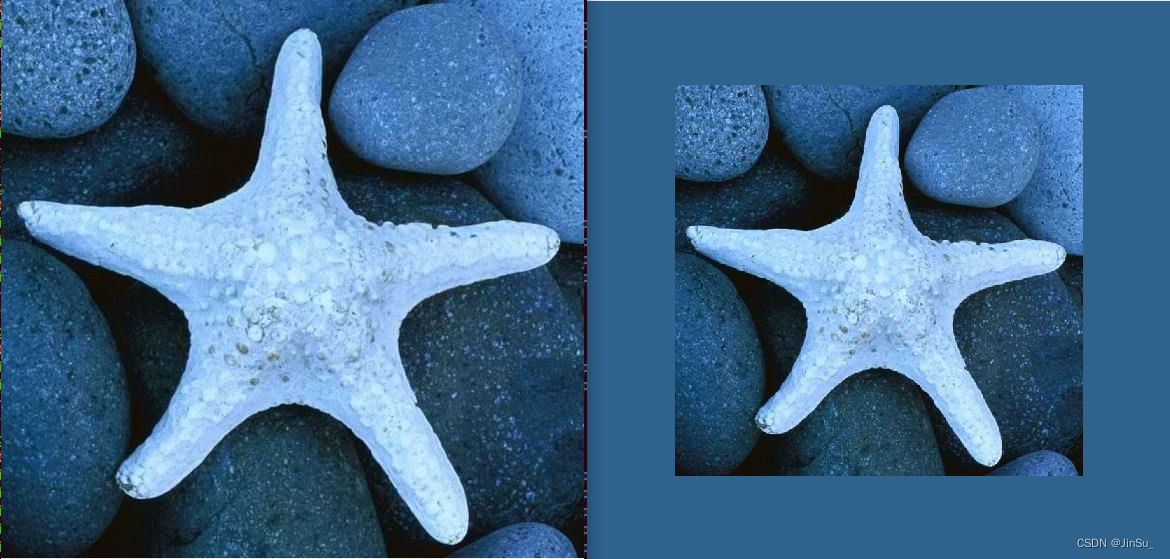
cv::imshow("INPUT_TITLE", img);
//建立映射表
// map_x.create(img.size(), CV_32FC1);
// map_y.create(img.size(), CV_32FC1);
map_xy.create(img.size(),CV_32FC2);
float alpha =0.7;
for (int row = 0; row < img.rows; row++)
{
for (int col = 0; col < img.cols; col++)
{
if (col > (img.cols * ((1-alpha)/2)) && col < (img.cols * ((1+alpha)/2)) && row > (img.rows * ((1-alpha)/2)) && row < (img.rows * ((1+alpha)/2)))
{
// map_x.at<float>(row, col) =(1/alpha) * (col - (img.cols * ((1-alpha)/2)));
// map_y.at<float>(row, col) =(1/alpha) * (row - img.rows * ((1-alpha)/2) - ((1-alpha)/2));
map_xy.at<cv::Vec2f>(row, col)[0] =(1/alpha) * (col - (img.cols * ((1-alpha)/2)));
map_xy.at<cv::Vec2f>(row, col)[1] =(1/alpha) * (row - img.rows * ((1-alpha)/2) - ((1-alpha)/2));
}
else
{
// map_x.at<float>(row, col) = 0;
// map_y.at<float>(row, col) = 0;
map_xy.at<cv::Vec2f>(row, col)[0] = 0;
map_xy.at<cv::Vec2f>(row, col)[1] = 0;
}
}
}
cv::remap(img, output, map_xy, cv::Mat(), cv::INTER_NEAREST, cv::BORDER_CONSTANT, cv::Scalar(0, 0, 255));
//cv::remap(img, output, map_x, map_y, cv::INTER_NEAREST, cv::BORDER_CONSTANT, cv::Scalar(0, 0, 255));
imshow("OUTPUT_TITLE", output);
cv::waitKey(0);
return 0;
}






















 1640
1640

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









