




整个文章很长,还请大家耐心看完,我会从Simulink控制参数和仿真建模全部截图展示出来,保证通过这个建模可以理解有感BLDC的控制原理。建议先去补充simulink的一些基础操作支持
一、BLDC反电动势建模分析
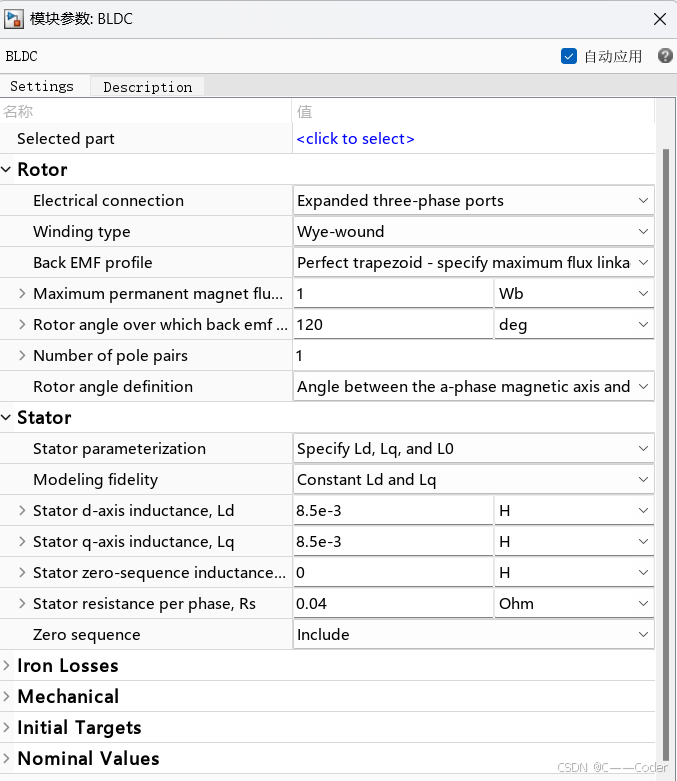
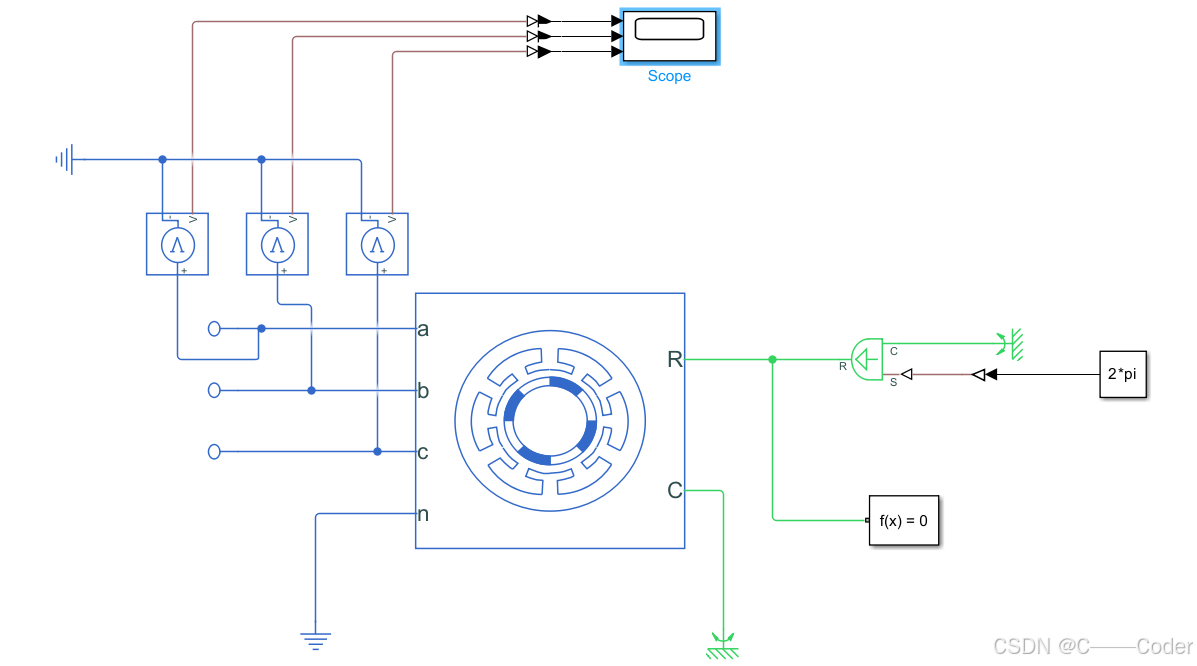
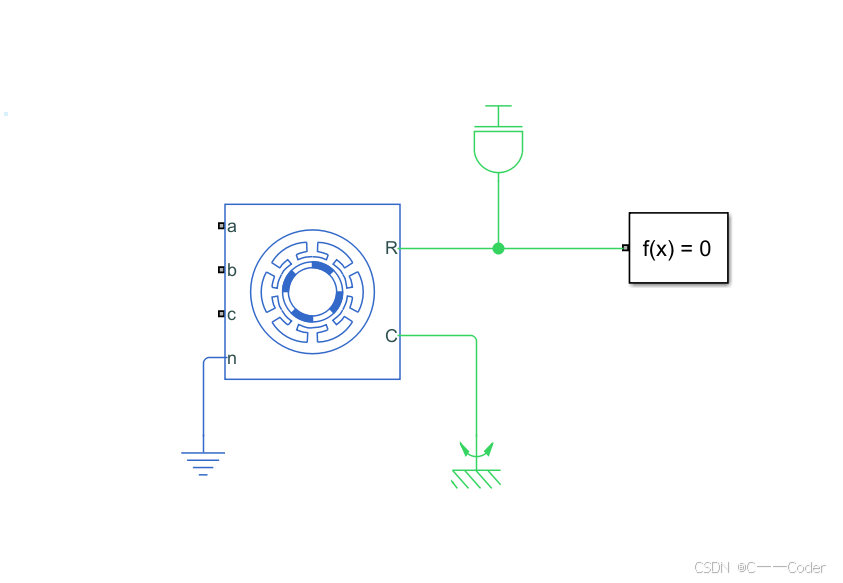
从simscape中找到BLDC,并拖进到Simulink的画布中,同时按如下设置好参数,下图是设置好参数的样子
设置几个outcircuit端口作为开路,连接到BLDC模块的a、b、c三个端口,n接入Electrical Reference(电气地参考),C接入Mechanical Rotational Reference(机械旋转参考)。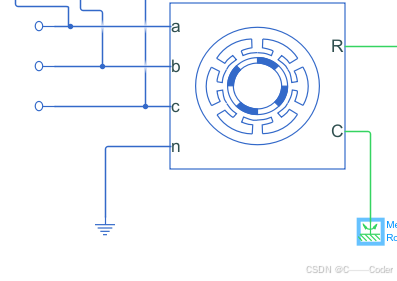
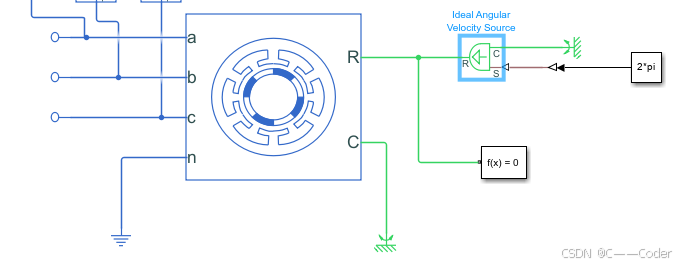
拖入Ideal Angular Velocity Source作为外部的速度源,同时引入求解器(
SolverConfiguration
),和目标角速度,按下图连接好。记住角速度接入时需要Simulink-PS Converter模块。
求解器参数按如下设置
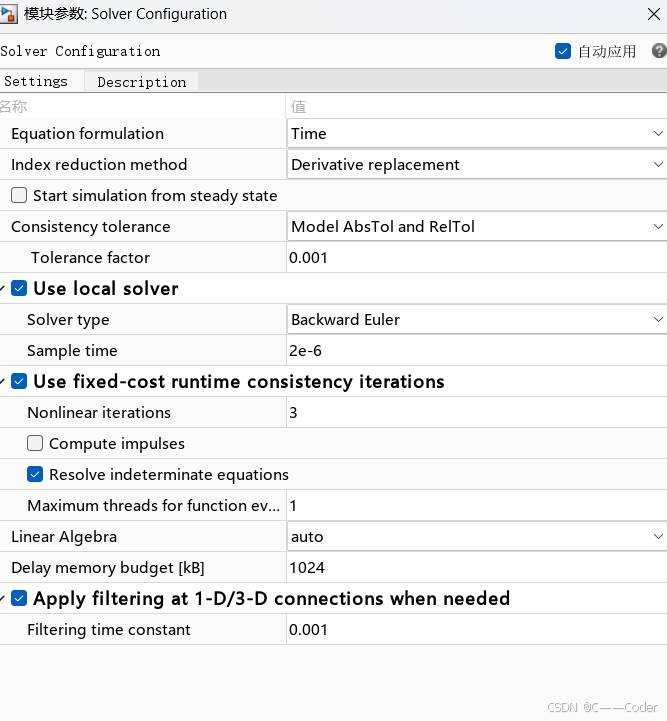
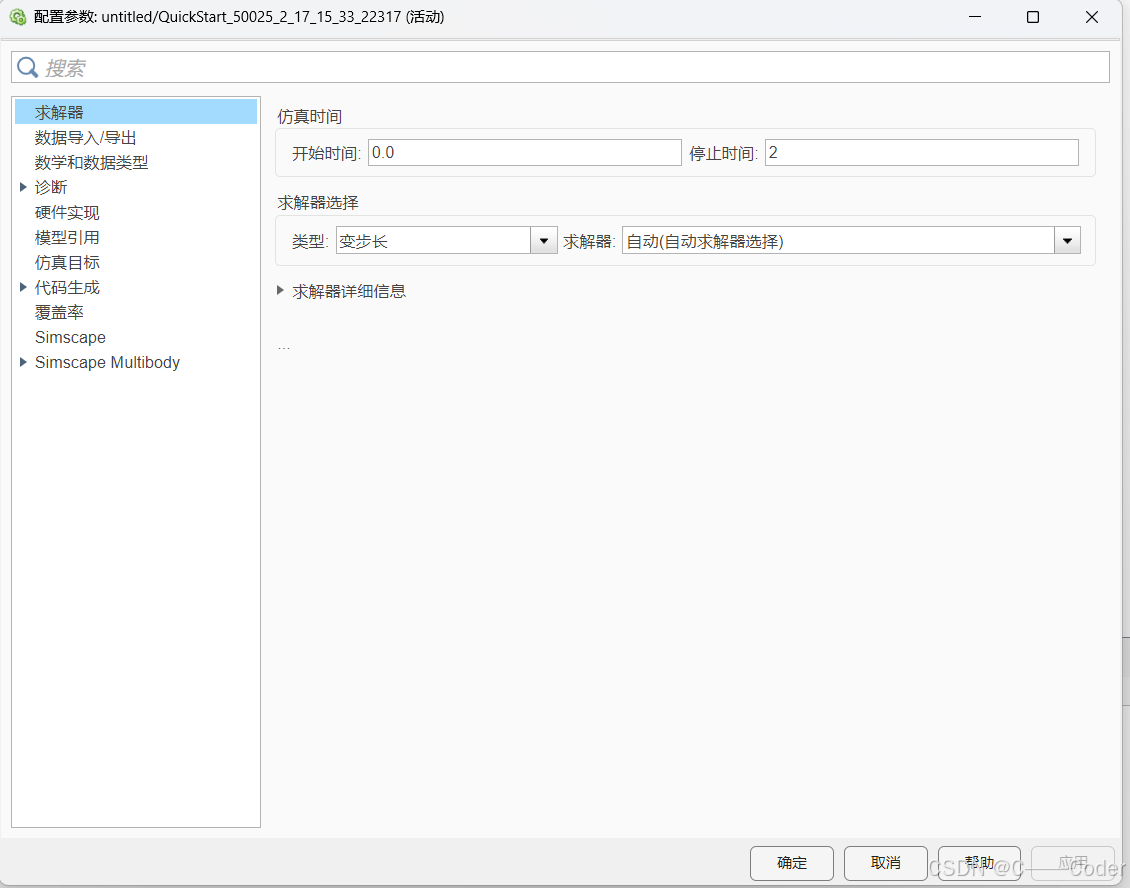
因为这个求解器的采样时间很短,推荐将simulink仿真设置为变步长。设置为定步长会提示错误
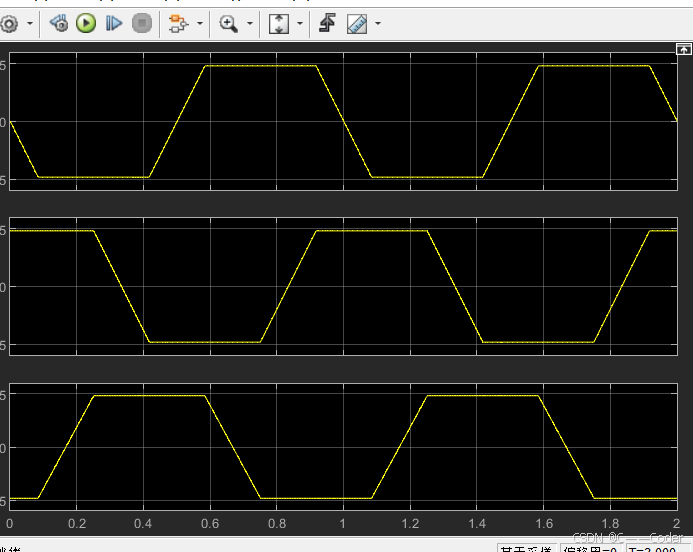
最后我们设置采样模块Voltage Sensor和scope观测BLDC的反电动势波形,按下图连接好,点击运行仿真观测示波器波形。记住连接到示波器时需要PS-Simulink Converter模块。
二、三相六臂逆变电路搭建。
在上一个模型的基础上,去掉其他的内容加入一个inertia惯性模块如下图,惯性模块的参数设置为0.2
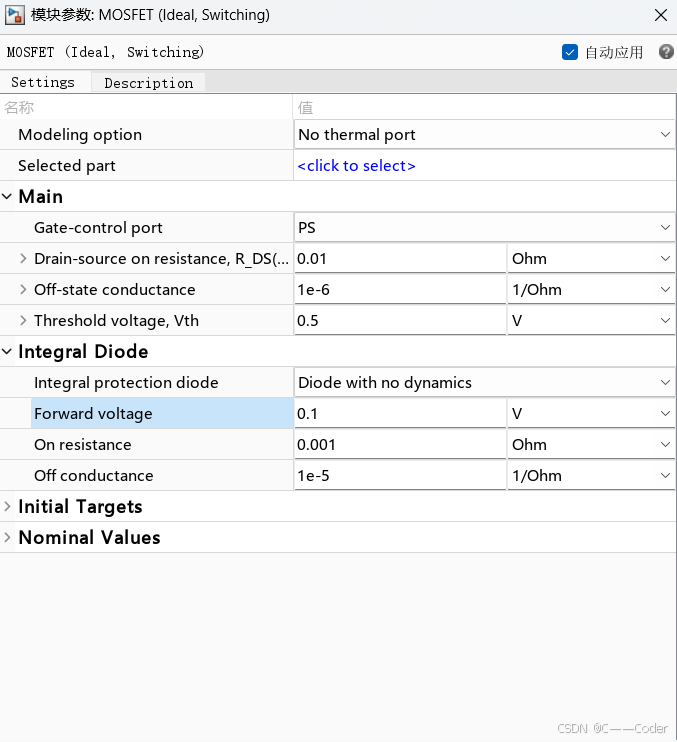
添加进来Mos管和Voltage Source(设置好电压),并按照下图设置好参数并建立好模型
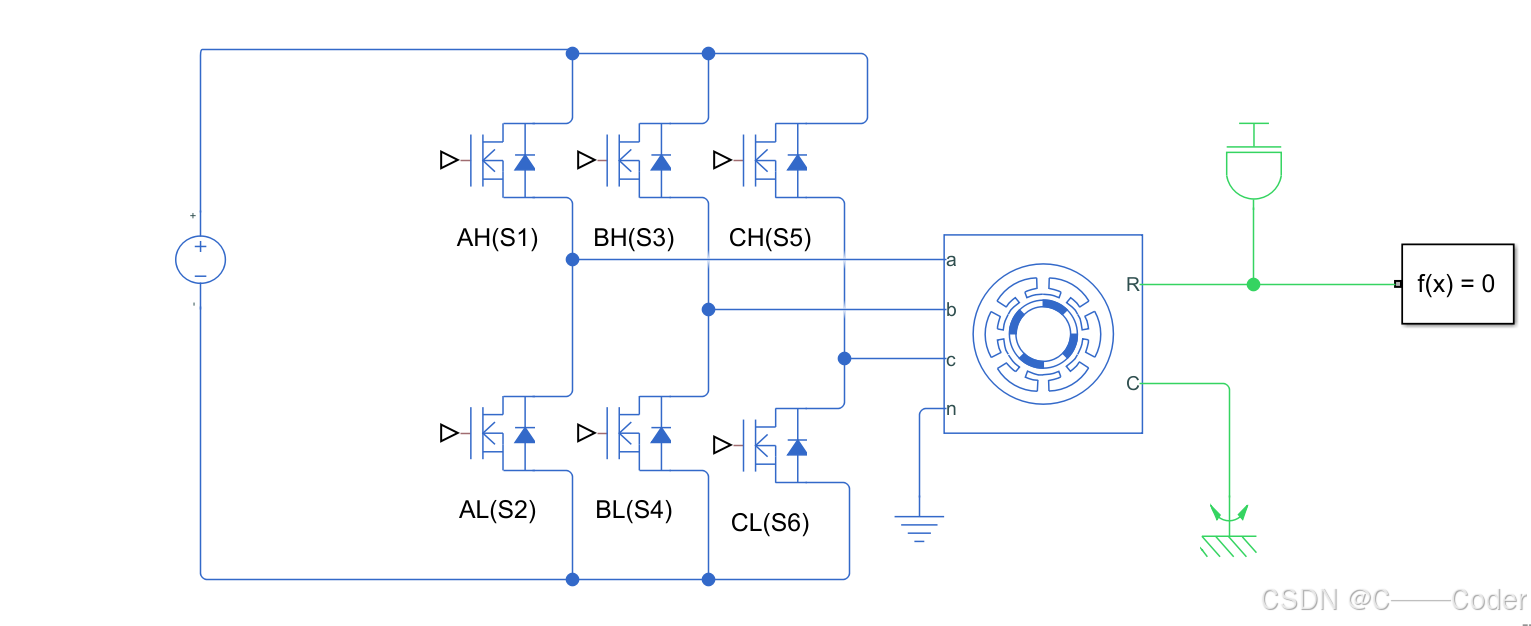
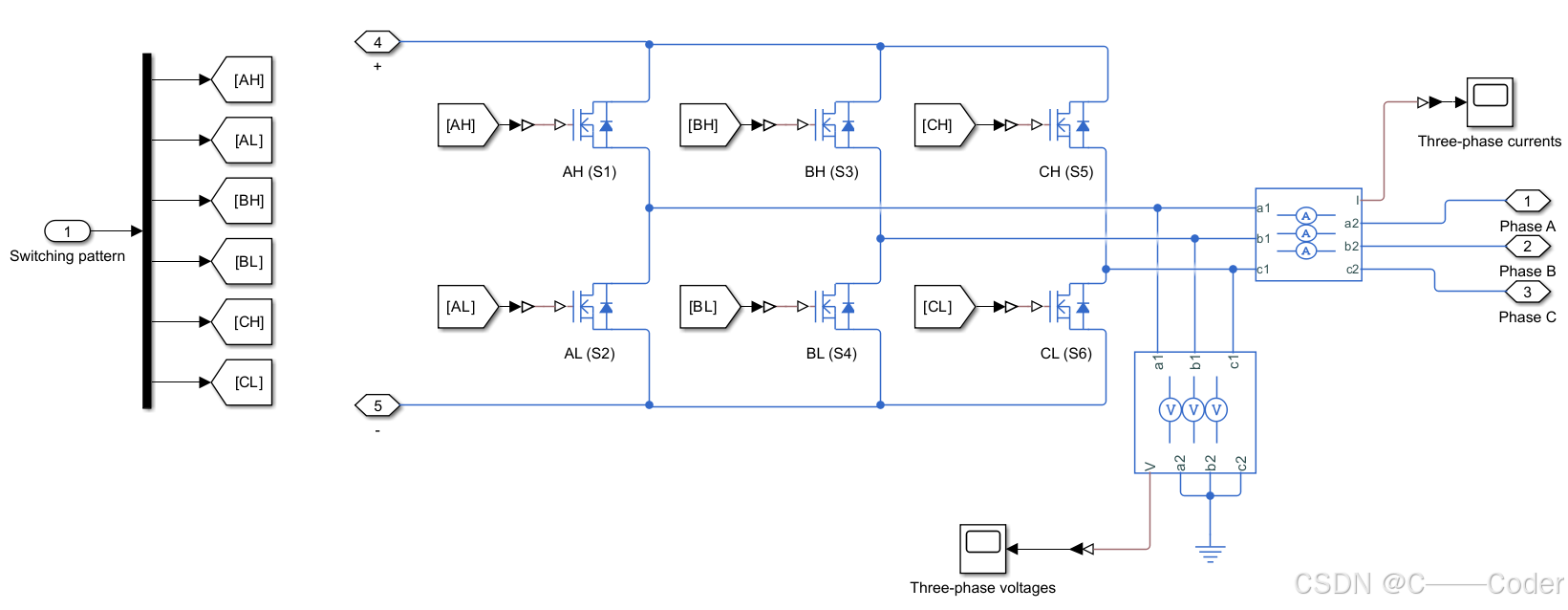
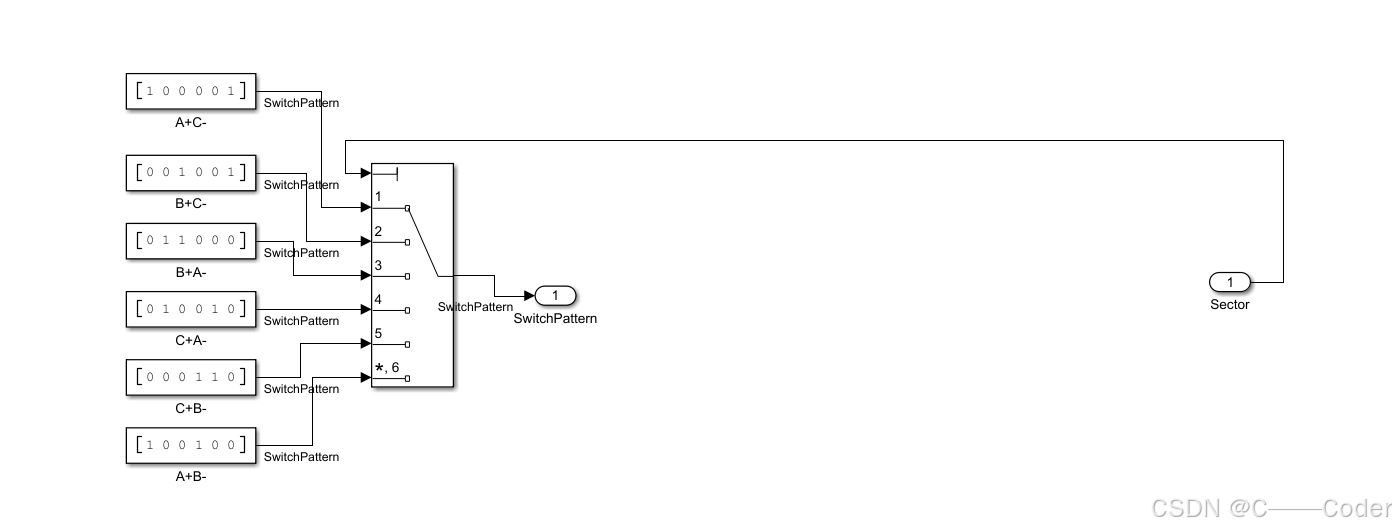
按照如下建立好三相逆变器的子系统,使用Goto模块和From模块控制mos管的开关
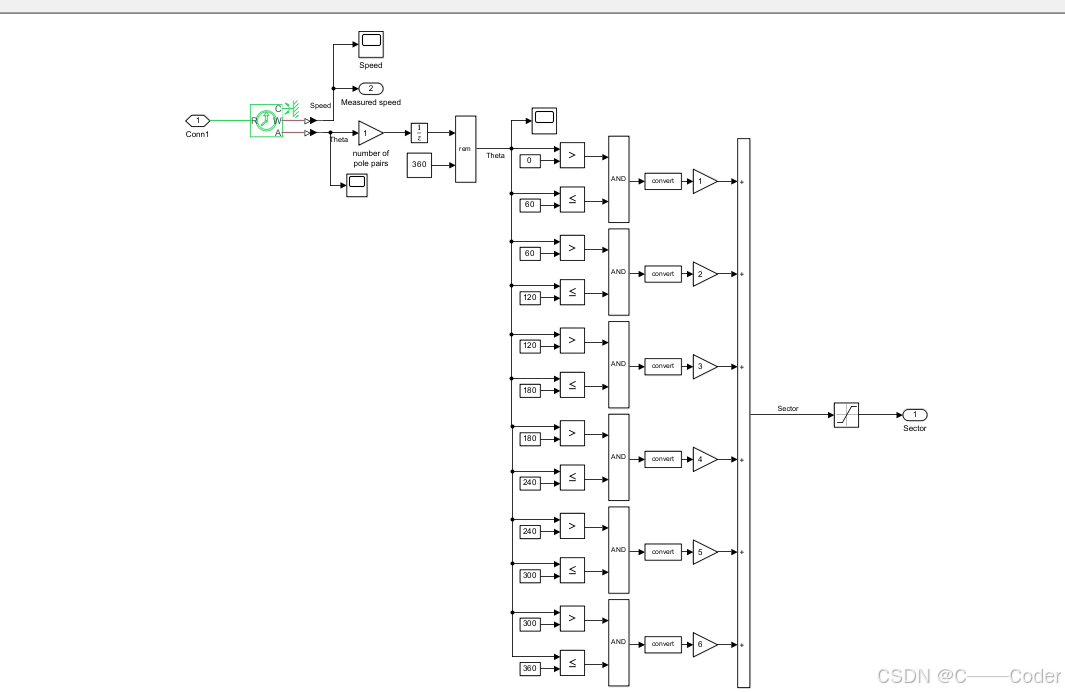
还可以考虑加入一个IdealRotationalMotoionSensor来得到速度和位置,并且建立霍尔角度计算逻辑
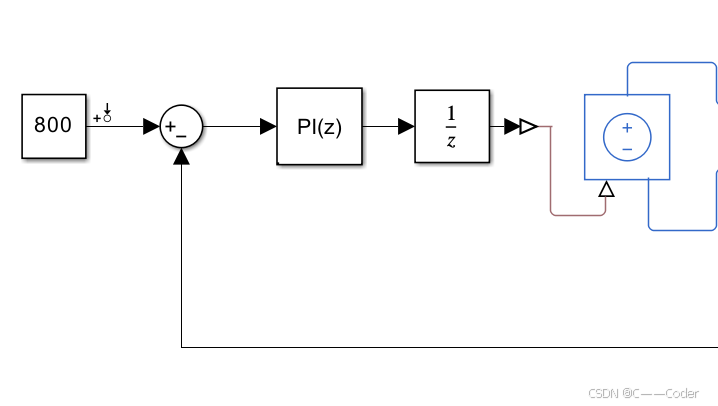
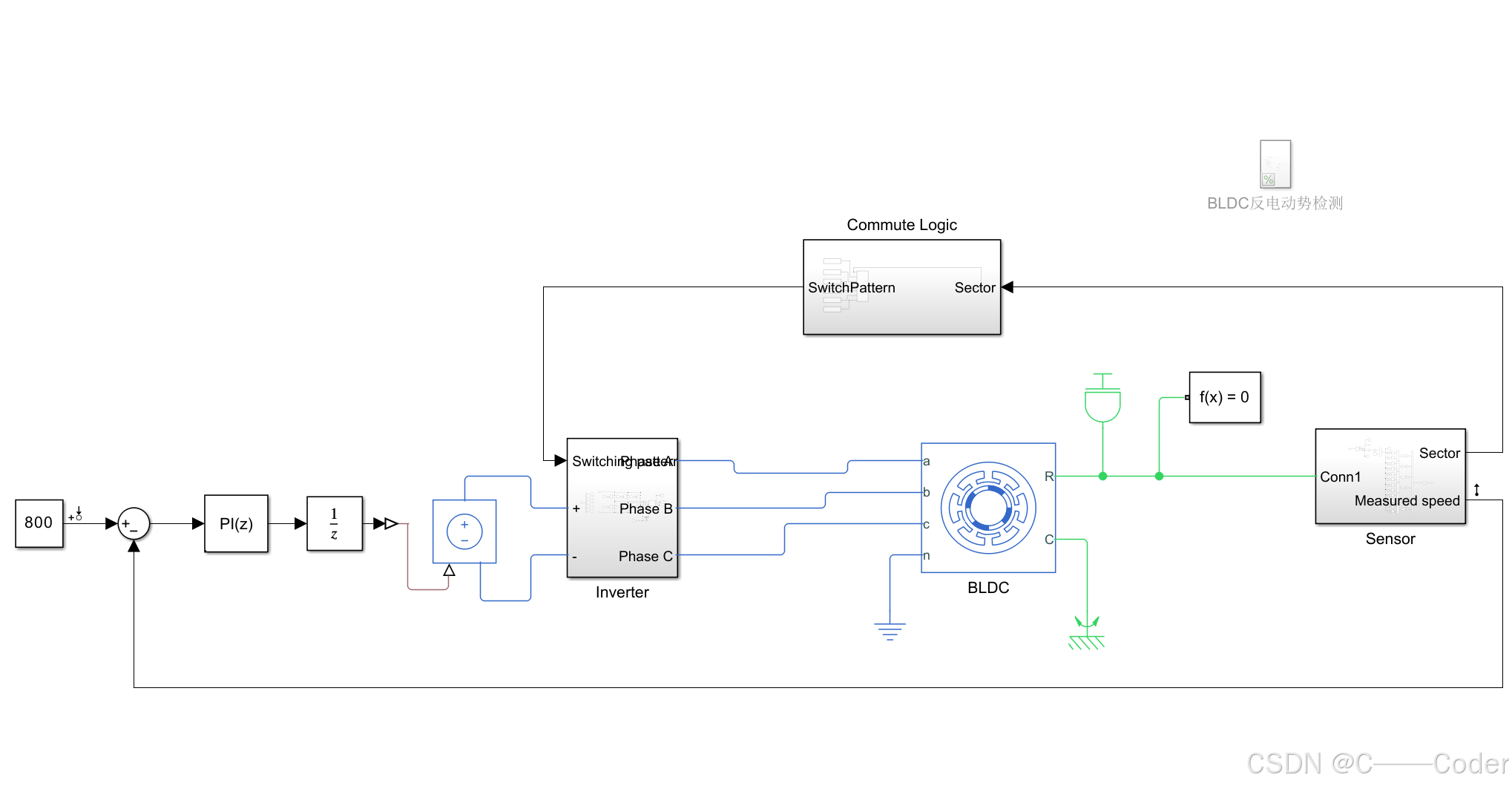
最后加入一个期望转速和目标转速的PID控制模块和一个理想电源控制模块就行了
最后总体预览效果
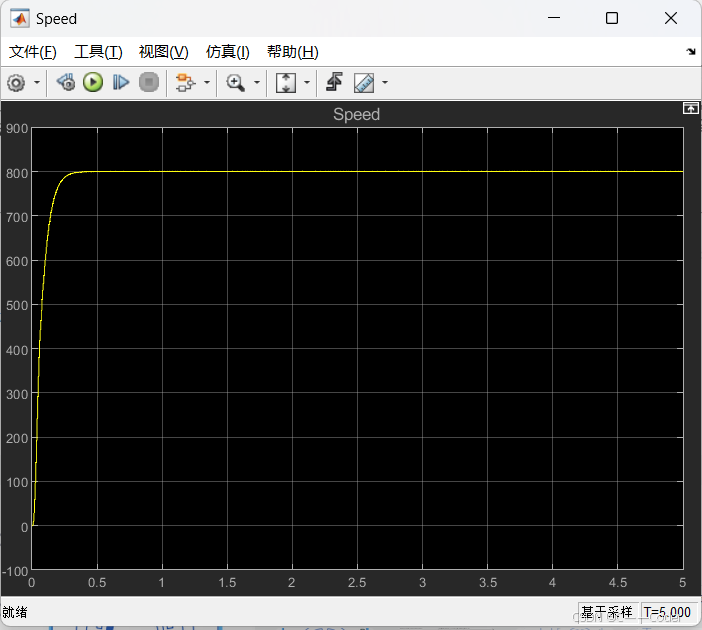
以及目标转速测试跟踪结果


















 1万+
1万+




 到【灌水乐园】发言
到【灌水乐园】发言







