




目录
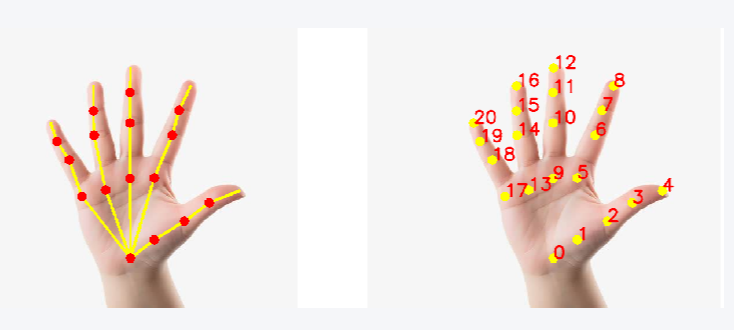
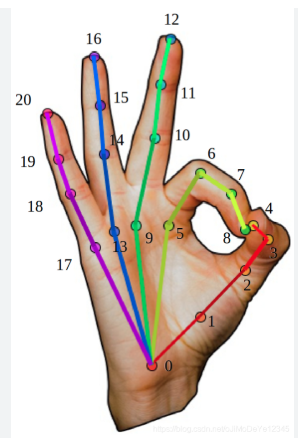
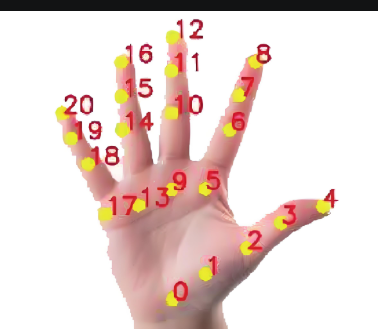
手势识别ok
python版:
import cv2
import mediapipe as mp
import math
# 初始化MediaPipe Hands
mp_hands = mp.solutions.hands
mp_drawing = mp.solutions.drawing_utils
mp_drawing_styles = mp.solutions.drawing_styles
# 计算两点之间的距离
def calculate_distance(point1, point2):
return math.sqrt((point1.x - point2.x) ** 2 + (point1.y - point2.y) ** 2)
# 检测手指是否伸直
def is_finger_straight(finger_tip, finger_pip, finger_mcp, wrist):
# 计算指尖到手腕的距离
tip_to_wrist = calculate_distance(finger_tip, wrist)
# 计算指关节到手腕的距离
pip_to_wrist = calculate_distance(finger_pip, wrist)
mcp_to_wrist = calculate_distance(finger_mcp, wrist)
# 如果指尖比指关节更远离手腕,则认为手指是伸直的
return tip_to_wrist > pip_to_wrist and tip_to_wrist > mcp_to_wrist
# 检测OK手势
def is_ok_gesture(hand_landmarks, handedness):
# 确认是右手
if handedness.classification[0].label != "Right":
return False
# 获取关键点
landmarks = hand_landmarks.landmark
# 拇指和食指的指尖
thumb_tip = landmarks[4]
index_tip = landmarks[8]
# 计算拇指和食指指尖的距离
thumb_index_distance = calculate_distance(thumb_tip, index_tip)
# 检查其他手指是否伸直或微屈
middle_straight = is_finger_straight(landmarks[12], landmarks[11], landmarks[9], landmarks[0])
ring_straight = is_finger_straight(landmarks[16], landmarks[15], landmarks[13], landmarks[0])
pinky_straight = is_finger_straight(landmarks[20], landmarks[19], landmarks[17], landmarks[0])
# 判断条件:拇指和食指接近,其他手指基本伸直
return (thumb_index_distance < 0.05 and middle_straight and ring_straight and pinky_straight)
# 主函数
def main():
# 初始化摄像头
cap = cv2.VideoCapture(0)
with mp_hands.Hands(model_complexity=0, min_detection_confidence=0.5, min_tracking_confidence=0.5) as hands:
while cap.isOpened():
success, image = cap.read()
if not success:
print("无法获取摄像头画面")
continue
image = cv2.flip(image, 1)
# 转换颜色空间 BGR to RGB
image.flags.writeable = False
image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
results = hands.process(image)
# 转换颜色空间 RGB to BGR
image.flags.writeable = True
image = cv2.cvtColor(image, cv2.COLOR_RGB2BGR)
# 检测到手部
if results.multi_hand_landmarks:
for hand_landmarks, handedness in zip(results.multi_hand_landmarks, results.multi_handedness):
# 绘制手部关键点
mp_drawing.draw_landmarks(image, hand_landmarks, mp_hands.HAND_CONNECTIONS, mp_drawing_styles.get_default_hand_landmarks_style(),
mp_drawing_styles.get_default_hand_connections_style())
# 检测OK手势
if is_ok_gesture(hand_landmarks, handedness):
# 在画面上显示"OK Gesture"
cv2.putText(image, "OK Gesture", (50, 50), cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 255, 0), 2)
# 显示画面
cv2.imshow('Hand Gesture Recognition', image)
# 按'q'退出
if cv2.waitKey(5) & 0xFF == ord('q'):
break
cap.release()
cv2.destroyAllWindows()
if __name__ == "__main__":
main()c++版:
github来源:ncnn-Android-mediapipe_hand
hand.cpp
// Tencent is pleased to support the open source community by making ncnn available.
//
// Copyright (C) 2021 THL A29 Limited, a Tencent company. All rights reserved.
//
// Licensed under the BSD 3-Clause License (the "License"); you may not use this file except
// in compliance with the License. You may obtain a copy of the License at
//
// https://opensource.org/licenses/BSD-3-Clause
//
// Unless required by applicable law or agreed to in writing, software distributed
// under the License is distributed on an "AS IS" BASIS, WITHOUT WARRANTIES OR
// CONDITIONS OF ANY KIND, either express or implied. See the License for the
// specific language governing permissions and limitations under the License.
#include "hand.h"
#include <opencv2/core/core.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include "cpu.h"
//#include <opencv2/opencv.hpp>
#include <vector>
#include <cmath>
//struct Palm_Object {
// std::vector<cv::Point> skeleton; // 21个关键点
// std::vector<cv::Point> hand_pos; // 4点外接框
//};
// 计算两点之间的欧氏距离
double euclideanDistance(const cv::Point2f& p1, const cv::Point2f& p2) {
return std::sqrt(std::pow(p1.x - p2.x, 2) + std::pow(p1.y - p2.y, 2));
}
inline float distance(const cv::Point& a, const cv::Point& b) {
return std::sqrt((a.x - b.x) * (a.x - b.x) +
(a.y - b.y) * (a.y - b.y));
}
// 判断是否为OK手势
bool isOKGesture(const std::vector<cv::Point2f>& skeleton) {
if (skeleton.size() < 21) return false;
// 获取关键点
const cv::Point2f& thumb_tip = skeleton[4]; // 拇指指尖
const cv::Point2f& index_tip = skeleton[8]; // 食指指尖
const cv::Point2f& middle_tip = skeleton[12]; // 中指指尖
const cv::Point2f& ring_tip = skeleton[16]; // 无名指指尖
const cv::Point2f& pinky_tip = skeleton[20]; // 小指指尖
// 1. 判断拇指与食指指尖接近
float d_thumb_index = distance(thumb_tip, index_tip);
float hand_size = distance(skeleton[0], skeleton[9]); // 手掌高度近似
if (d_thumb_index > hand_size * 0.3) {
return false;
}
// 2. 判断中指、无名指、小指伸直
bool middle_straight = distance(middle_tip, skeleton[9]) > hand_size * 0.5;
bool ring_straight = distance(ring_tip, skeleton[13]) > hand_size * 0.5;
bool pinky_straight = distance(pinky_tip, skeleton[17]) > hand_size * 0.5;
return (middle_straight && ring_straight && pinky_straight);
}
static float calculate_scale(float min_scale, float max_scale, int stride_index, int num_strides)
{
if (num_strides == 1)
return (min_scale + max_scale) * 0.5f;
else
return min_scale + (max_scale - min_scale) * 1.0 * stride_index / (num_strides - 1.0f);
}
static void generate_anchors(std::vector<Anchor>& anchors, const AnchorsParams& anchor_params)
{
int layer_id = 0;
for(int layer_id = 0; layer_id < anchor_params.strides.size();)
{
std::vector<float> anchor_height;
std::vector<float> anchor_width;
std::vector<float> aspect_ratios;
std::vector<float> scales;
int last_same_stride_layer = layer_id;
while (last_same_stride_layer < (int)anchor_params.strides.size() &&
anchor_params.strides[last_same_stride_layer] == anchor_params.strides[layer_id])
{
const float scale = calculate_scale(anchor_params.min_scale, anchor_params.max_scale,last_same_stride_layer, anchor_params.strides.size());
{
for (int aspect_ratio_id = 0; aspect_ratio_id < (int)anchor_params.aspect_ratios.size(); aspect_ratio_id++)
{
aspect_ratios.push_back(anchor_params.aspect_ratios[aspect_ratio_id]);
scales.push_back(scale);
}
const float scale_next =last_same_stride_layer == (int)anchor_params.strides.size() - 1? 1.0f : calculate_scale(anchor_params.min_scale, anchor_params.max_scale,last_same_stride_layer + 1,anchor_params.strides.size());
scales.push_back(std::sqrt(scale * scale_next));
aspect_ratios.push_back(1.0);
}
last_same_stride_layer++;
}
for (int i = 0; i < (int)aspect_ratios.size(); ++i)
{
const float ratio_sqrts = std::sqrt(aspect_ratios[i]);
anchor_height.push_back(scales[i] / ratio_sqrts);
anchor_width.push_back(scales[i] * ratio_sqrts);
}
int feature_map_height = 0;
int feature_map_width = 0;
const int stride = anchor_params.strides[layer_id];
feature_map_height = std::ceil(1.0f * anchor_params.input_size_height / stride);
feature_map_width = std::ceil(1.0f * anchor_params.input_size_width / stride);
for (int y = 0; y < feature_map_height; ++y)
{
for (int x = 0; x < feature_map_width; ++x)
{
for (int anchor_id = 0; anchor_id < (int)anchor_height.size(); ++anchor_id)
{
const float x_center = (x + anchor_params.anchor_offset_x) * 1.0f / feature_map_width;
const float y_center = (y + anchor_params.anchor_offset_y) * 1.0f / feature_map_height;
Anchor new_anchor;
new_anchor.x_center = x_center;
new_anchor.y_center = y_center;
new_anchor.w = 1.0f;
new_anchor.h = 1.0f;
anchors.push_back(new_anchor);
}
}
}
layer_id = last_same_stride_layer;
}
}
static void create_ssd_anchors(int input_w, int input_h, std::vector<Anchor> &anchors)
{
AnchorsParams anchor_options;
anchor_options.num_layers = 4;
anchor_options.min_scale = 0.1484375;
anchor_options.max_scale = 0.75;
anchor_options.input_size_height = 192;
anchor_options.input_size_width = 192;
anchor_options.anchor_offset_x = 0.5f;
anchor_options.anchor_offset_y = 0.5f;
anchor_options.strides.push_back(8);
anchor_options.strides.push_back(16);
anchor_options.strides.push_back(16);
anchor_options.strides.push_back(16);
anchor_options.aspect_ratios.push_back(1.0);
generate_anchors(anchors, anchor_options);
}
static inline float sigmoid(float x)
{
return static_cast<float>(1.f / (1.f + exp(-x)));
}
static int decode_bounds(std::list<DetectRegion>& region_list, float score_thresh, int input_img_w, int input_img_h, float* scores_ptr, float* bboxes_ptr, std::vector<Anchor>& anchors)
{
DetectRegion region;
int i = 0;
for (auto &anchor : anchors)
{
float score = sigmoid(scores_ptr[i]);
if (score > score_thresh)
{
float* p = bboxes_ptr + (i * 18);
float cx = p[0] / input_img_w + anchor.x_center;
float cy = p[1] / input_img_h + anchor.y_center;
float w = p[2] / input_img_w;
float h = p[3] / input_img_h;
cv::Point2f topleft, btmright;
topleft.x = cx - w * 0.5f;
topleft.y = cy - h * 0.5f;
btmright.x = cx + w * 0.5f;
btmright.y = cy + h * 0.5f;
region.score = score;
region.topleft = topleft;
region.btmright = btmright;
for (int j = 0; j < 7; j++)
{
float lx = p[4 + (2 * j) + 0];
float ly = p[4 + (2 * j) + 1];
lx += anchor.x_center * input_img_w;
ly += anchor.y_center * input_img_h;
lx /= (float)input_img_w;
ly /= (float)input_img_h;
region.landmarks[j].x = lx;
region.landmarks[j].y = ly;
}
region_list.push_back(region);
}
i++;
}
return 0;
}
static float calc_intersection_over_union(DetectRegion& region0, DetectRegion& region1)
{
float sx0 = region0.topleft.x;
float sy0 = region0.topleft.y;
float ex0 = region0.btmright.x;
float ey0 = region0.btmright.y;
float sx1 = region1.topleft.x;
float sy1 = region1.topleft.y;
float ex1 = region1.btmright.x;
float ey1 = region1.btmright.y;
float xmin0 = std::min(sx0, ex0);
float ymin0 = std::min(sy0, ey0);
float xmax0 = std::max(sx0, ex0);
float ymax0 = std::max(sy0, ey0);
float xmin1 = std::min(sx1, ex1);
float ymin1 = std::min(sy1, ey1);
float xmax1 = std::max(sx1, ex1);
float ymax1 = std::max(sy1, ey1);
float area0 = (ymax0 - ymin0) * (xmax0 - xmin0);
float area1 = (ymax1 - ymin1) * (xmax1 - xmin1);
if (area0 <= 0 || area1 <= 0)
return 0.0f;
float intersect_xmin = std::max(xmin0, xmin1);
float intersect_ymin = std::max(ymin0, ymin1);
float intersect_xmax = std::min(xmax0, xmax1);
float intersect_ymax = std::min(ymax0, ymax1);
float intersect_area = std::max(intersect_ymax - intersect_ymin, 0.0f) *
std::max(intersect_xmax - intersect_xmin, 0.0f);
return intersect_area / (area0 + area1 - intersect_area);
}
static int non_max_suppression(std::list<DetectRegion>& region_list, std::list<DetectRegion>& region_nms_list, float iou_thresh)
{
region_list.sort([](DetectRegion& v1, DetectRegion& v2) { return v1.score > v2.score ? true : false; });
for (auto itr = region_list.begin(); itr != region_list.end(); itr++)
{
DetectRegion region_candidate = *itr;
int ignore_candidate = false;
for (auto itr_nms = region_nms_list.rbegin(); itr_nms != region_nms_list.rend(); itr_nms++)
{
DetectRegion region_nms = *itr_nms;
float iou = calc_intersection_over_union(region_candidate, region_nms);
if (iou >= iou_thresh)
{
ignore_candidate = true;
break;
}
}
if (!ignore_candidate)
{
region_nms_list.push_back(region_candidate);
if (region_nms_list.size() >= 5)
break;
}
}
return 0;
}
static float normalize_radians(float angle)
{
return angle - 2 * M_PI * std::floor((angle - (-M_PI)) / (2 * M_PI));
}
static void compute_rotation(DetectRegion& region)
{
float x0 = region.landmarks[0].x;
float y0 = region.landmarks[0].y;
float x1 = region.landmarks[2].x;
float y1 = region.landmarks[2].y;
float target_angle = M_PI * 0.5f;
float rotation = target_angle - std::atan2(-(y1 - y0), x1 - x0);
region.rotation = normalize_radians(rotation);
}
void rot_vec(cv::Point2f& vec, float rotation)
{
float sx = vec.x;
float sy = vec.y;
vec.x = sx * std::cos(rotation) - sy * std::sin(rotation);
vec.y = sx * std::sin(rotation) + sy * std::cos(rotation);
}
void compute_detect_to_roi(DetectRegion& region, const int& target_size, PalmObject& palm)
{
float width = region.btmright.x - region.topleft.x;
float height = region.btmright.y - region.topleft.y;
float palm_cx = region.topleft.x + width* 0.5f;
float palm_cy = region.topleft.y + height * 0.5f;
float hand_cx;
float hand_cy;
float rotation = region.rotation;
float shift_x = 0.0f;
float shift_y = -0.5f;
if (rotation == 0.0f)
{
hand_cx = palm_cx + (width * shift_x);
hand_cy = palm_cy + (height * shift_y);
}
else
{
float dx = (width * shift_x) * std::cos(rotation) -
(height * shift_y) * std::sin(rotation);
float dy = (width * shift_x) * std::sin(rotation) +
(height * shift_y) * std::cos(rotation);
hand_cx = palm_cx + dx;
hand_cy = palm_cy + dy;
}
float long_side = std::max(width, height);
width = long_side;
height = long_side;
float hand_w = width * 2.6f;
float hand_h = height * 2.6f;
palm.hand_cx = hand_cx;
palm.hand_cy = hand_cy;
palm.hand_w = hand_w;
palm.hand_h = hand_h;
float dx = hand_w * 0.5f;
float dy = hand_h * 0.5f;
palm.hand_pos[0].x = -dx; palm.hand_pos[0].y = -dy;
palm.hand_pos[1].x = +dx; palm.hand_pos[1].y = -dy;
palm.hand_pos[2].x = +dx; palm.hand_pos[2].y = +dy;
palm.hand_pos[3].x = -dx; palm.hand_pos[3].y = +dy;
for (int i = 0; i < 4; i++)
{
rot_vec(palm.hand_pos[i], rotation);
palm.hand_pos[i].x += hand_cx;
palm.hand_pos[i].y += hand_cy;
}
for (int i = 0; i < 7; i++)
{
palm.landmarks[i] = region.landmarks[i];
}
palm.score = region.score;
}
static void pack_detect_result(std::vector<DetectRegion>& detect_results, std::list<DetectRegion>& region_list, const int& target_size,std::vector<PalmObject>& palmlist)
{
for (auto& region : region_list)
{
compute_rotation(region);
PalmObject palm;
compute_detect_to_roi(region, target_size,palm);
palmlist.push_back(palm);
detect_results.push_back(region);
}
}
Hand::Hand()
{
blob_pool_allocator.set_size_compare_ratio(0.f);
workspace_pool_allocator.set_size_compare_ratio(0.f);
}
int Hand::load(AAssetManager* mgr, const char* modeltype, int _target_size, const float* _mean_vals, const float* _norm_vals, bool use_gpu)
{
blazepalm_net.clear();
blob_pool_allocator.clear();
workspace_pool_allocator.clear();
ncnn::set_cpu_powersave(2);
ncnn::set_omp_num_threads(ncnn::get_big_cpu_count());
blazepalm_net.opt = ncnn::Option();
#if NCNN_VULKAN
blazepalm_net.opt.use_vulkan_compute = use_gpu;
#endif
blazepalm_net.opt.num_threads = ncnn::get_big_cpu_count();
blazepalm_net.opt.blob_allocator = &blob_pool_allocator;
blazepalm_net.opt.workspace_allocator = &workspace_pool_allocator;
char parampath[256];
char modelpath[256];
sprintf(parampath, "%s-op.param", modeltype);
sprintf(modelpath, "%s-op.bin", modeltype);
blazepalm_net.load_param(mgr, parampath);
blazepalm_net.load_model(mgr, modelpath);
landmark.load(mgr,"hand_lite-op");//there are two models: hand_lite-op, hand_full-op
target_size = _target_size;
mean_vals[0] = _mean_vals[0];
mean_vals[1] = _mean_vals[1];
mean_vals[2] = _mean_vals[2];
norm_vals[0] = _norm_vals[0];
norm_vals[1] = _norm_vals[1];
norm_vals[2] = _norm_vals[2];
anchors.clear();
create_ssd_anchors(target_size, target_size, anchors);
return 0;
}
int Hand::detect(const cv::Mat& rgb, std::vector<PalmObject>& objects, float prob_threshold, float nms_threshold)
{
int width = rgb.cols;
int height = rgb.rows;
int w = width;
int h = height;
float scale = 1.f;
if (w > h)
{
scale = (float)target_size / w;
w = target_size;
h = h * scale;
}
else
{
scale = (float)target_size / h;
h = target_size;
w = w * scale;
}
ncnn::Mat in = ncnn::Mat::from_pixels_resize(rgb.data, ncnn::Mat::PIXEL_RGB, width, height, w, h);
int wpad = target_size - w;
int hpad = target_size - h;
ncnn::Mat in_pad;
ncnn::copy_make_border(in, in_pad, hpad / 2, hpad - hpad / 2, wpad / 2, wpad - wpad / 2, ncnn::BORDER_CONSTANT, 0.f);
const float norm_vals[3] = { 1 / 255.f, 1 / 255.f, 1 / 255.f };
in_pad.substract_mean_normalize(0, norm_vals);
ncnn::Extractor ex = blazepalm_net.create_extractor();
ncnn::Mat cls, reg;
ex.input("input", in_pad);
ex.extract("cls", cls);
ex.extract("reg", reg);
float* scores = (float*)cls.data;
float* bboxes = (float*)reg.data;
std::list<DetectRegion> region_list, region_nms_list;
std::vector<DetectRegion> detect_results;
decode_bounds(region_list, prob_threshold, target_size, target_size, scores, bboxes, anchors);
non_max_suppression(region_list, region_nms_list, nms_threshold);
objects.clear();
pack_detect_result(detect_results, region_nms_list, target_size, objects);
for (int i = 0; i < objects.size(); i++)
{
objects[i].hand_pos[0].x = (objects[i].hand_pos[0].x * target_size - (wpad / 2)) / scale;
objects[i].hand_pos[0].y = (objects[i].hand_pos[0].y * target_size - (hpad / 2)) / scale;
objects[i].hand_pos[1].x = (objects[i].hand_pos[1].x * target_size - (wpad / 2)) / scale;
objects[i].hand_pos[1].y = (objects[i].hand_pos[1].y * target_size - (hpad / 2)) / scale;
objects[i].hand_pos[2].x = (objects[i].hand_pos[2].x * target_size - (wpad / 2)) / scale;
objects[i].hand_pos[2].y = (objects[i].hand_pos[2].y * target_size - (hpad / 2)) / scale;
objects[i].hand_pos[3].x = (objects[i].hand_pos[3].x * target_size - (wpad / 2)) / scale;
objects[i].hand_pos[3].y = (objects[i].hand_pos[3].y * target_size - (hpad / 2)) / scale;
//for (int j = 0; j < 7; j++)
//{
// objects[i].landmarks[j].x = (objects[i].landmarks[j].x * target_size - (wpad / 2)) / scale;
// objects[i].landmarks[j].y = (objects[i].landmarks[j].y * target_size - (hpad / 2)) / scale;
//}
cv::Point2f srcPts[4];
srcPts[0] = objects[i].hand_pos[0];
srcPts[1] = objects[i].hand_pos[1];
srcPts[2] = objects[i].hand_pos[2];
srcPts[3] = objects[i].hand_pos[3];
cv::Point2f dstPts[4];
dstPts[0] = cv::Point2f(0, 0);
dstPts[1] = cv::Point2f(224, 0);
dstPts[2] = cv::Point2f(224, 224);
dstPts[3] = cv::Point2f(0, 224);
cv::Mat trans_mat = cv::getAffineTransform(srcPts, dstPts);
cv::warpAffine(rgb, objects[i].trans_image, trans_mat, cv::Size(224, 224), 1, 0);
cv::Mat trans_mat_inv;
cv::invertAffineTransform(trans_mat, trans_mat_inv);
float score = landmark.detect(objects[i].trans_image, trans_mat_inv, objects[i].skeleton);
}
return 0;
}
int Hand::draw(cv::Mat& rgb, const std::vector<PalmObject>& objects)
{
for (int i = 0; i < objects.size(); i++)
{
objects[i].trans_image.copyTo(rgb(cv::Rect(0,0,224,224)));
for(int j = 0; j < objects[i].skeleton.size(); j++)
{
cv::Scalar color1(10, 215, 255);
cv::Scalar color2(255, 115, 55);
cv::Scalar color3(5, 255, 55);
cv::Scalar color4(25, 15, 255);
cv::Scalar color5(225, 15, 55);
for(size_t j = 0; j < 21; j++)
{
cv::circle(rgb, objects[i].skeleton[j],4,cv::Scalar(255,0,0),-1);
if (j < 4)
{
cv::line(rgb, objects[i].skeleton[j], objects[i].skeleton[j+1], color1, 2, 8);
}
if (j < 8 && j > 4)
{
cv::line(rgb, objects[i].skeleton[j], objects[i].skeleton[j+1], color2, 2, 8);
}
if (j < 12 && j > 8)
{
cv::line(rgb, objects[i].skeleton[j], objects[i].skeleton[j+1], color3, 2, 8);
}
if (j < 16 && j > 12)
{
cv::line(rgb, objects[i].skeleton[j], objects[i].skeleton[j+1], color4, 2, 8);
}
if (j < 20 && j > 16)
{
cv::line(rgb, objects[i].skeleton[j], objects[i].skeleton[j+1], color5, 2, 8);
}
}
cv::line(rgb, objects[i].skeleton[0], objects[i].skeleton[5], color2, 2, 8);
cv::line(rgb, objects[i].skeleton[0], objects[i].skeleton[9], color3, 2, 8);
cv::line(rgb, objects[i].skeleton[0], objects[i].skeleton[13], color4, 2, 8);
cv::line(rgb, objects[i].skeleton[0], objects[i].skeleton[17], color5, 2, 8);
}
cv::line(rgb, objects[i].hand_pos[0], objects[i].hand_pos[1], cv::Scalar(0, 0, 255), 2, 8, 0);
cv::line(rgb, objects[i].hand_pos[1], objects[i].hand_pos[2], cv::Scalar(0, 0, 255), 2, 8, 0);
cv::line(rgb, objects[i].hand_pos[2], objects[i].hand_pos[3], cv::Scalar(0, 0, 255), 2, 8, 0);
cv::line(rgb, objects[i].hand_pos[3], objects[i].hand_pos[0], cv::Scalar(0, 0, 255), 2, 8, 0);
bool isOK = isOKGesture(objects[i].skeleton);
if (isOK) {
cv::putText(rgb, "OK Gesture", cv::Point(10, 30),
cv::FONT_HERSHEY_SIMPLEX, 1.0, cv::Scalar(0, 255, 0), 2);
}
}
return 0;
}



















 7512
7512

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











