



1.项目介绍
1.1项目背景
在我们的日常生活中,寻找物品似乎是一件再平常不过的小事——当雨伞不见了,我们环顾四周便能迅速找到它。但对于盲人而言,这却是一个充满挑战的过程。无法依靠视觉判断方位,让他们常常需要反复摸索或寻求帮助。
如果科技能帮他们“看到”呢?本项目正是基于这样的思考而设计。我们利用二哈识图2的物体识别功能,结合行空板K10的计算与语音反馈能力,构建出一台能够听懂指令、自动扫描并提示方向的“盲人常见物品寻找机”。
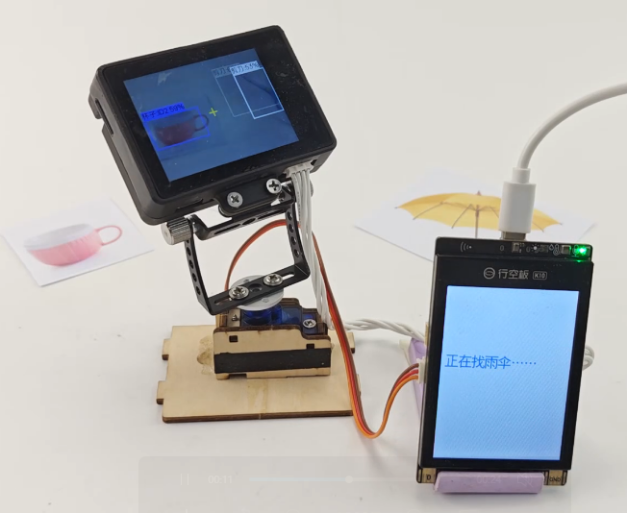
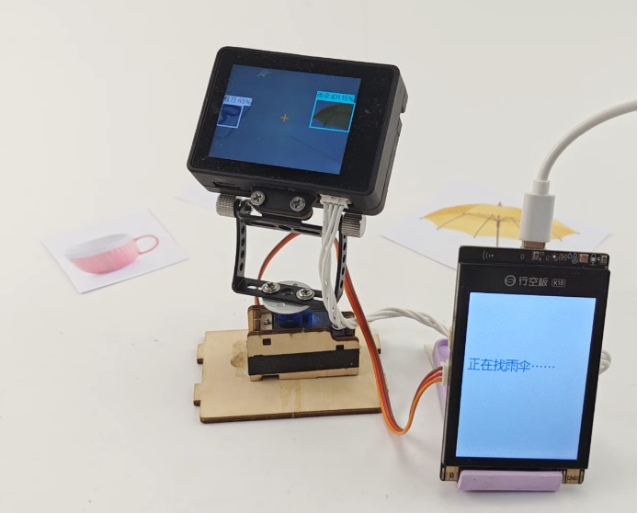
当用户说出“找雨伞”指令时,行空板K10控制舵机带动二哈识图2旋转扫描场景,识别到目标后,摄像头将方位信息通过I2C发送给行空板K10。行空板K10随即语音提示“手提包在你右前方”,并让舵机停在对应方向完成指示。帮助视障人士快速定位常用物品,让科技真正成为他们的“第二只眼睛”。
1.2演示视频
【二哈识图2 系列教程】盲人常见物品寻找机-演示视频
2. 项目实现原理
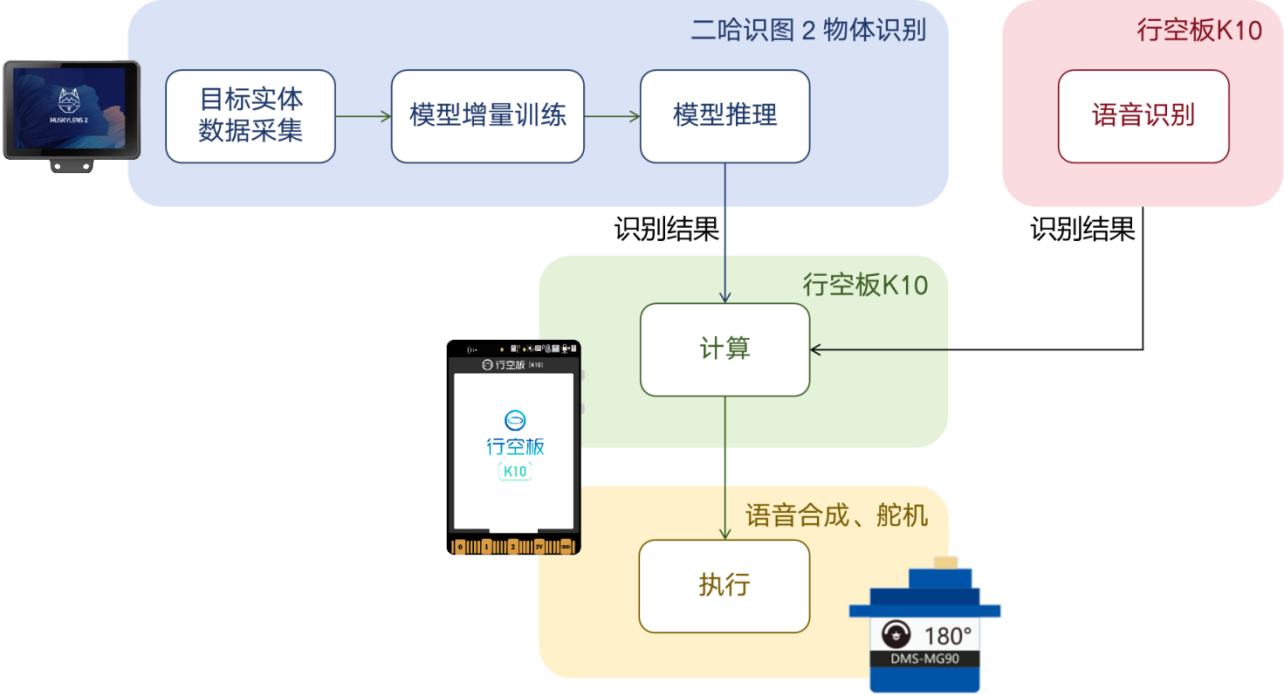
本项目通过二哈识图2的物体识别功能,结合行空板K10的主控计算能力,构建“盲人常见物品寻找机”。用户可通过语音命令触发物品识别,舵机带动二哈识图2转动以扩大搜索范围,二哈识图2在本地完成物体学习与实时推理,将识别结果通过I2C通信发送至行空板K10,主控接收到数据后,判断物品是否存在及舵机的方位信息:若存在,则通过语音合成模块(如“手提包在你右前方”)向用户反馈;若未识别到物品,则继续控制舵机带动摄像头转动搜索,形成持续寻找的流程。
3.软硬件准备
3.1软硬件器材清单

注意:Mind+ 编程软件版本为 v2.0,HuskyLens的版本为二哈识图2。
3.2硬件连接
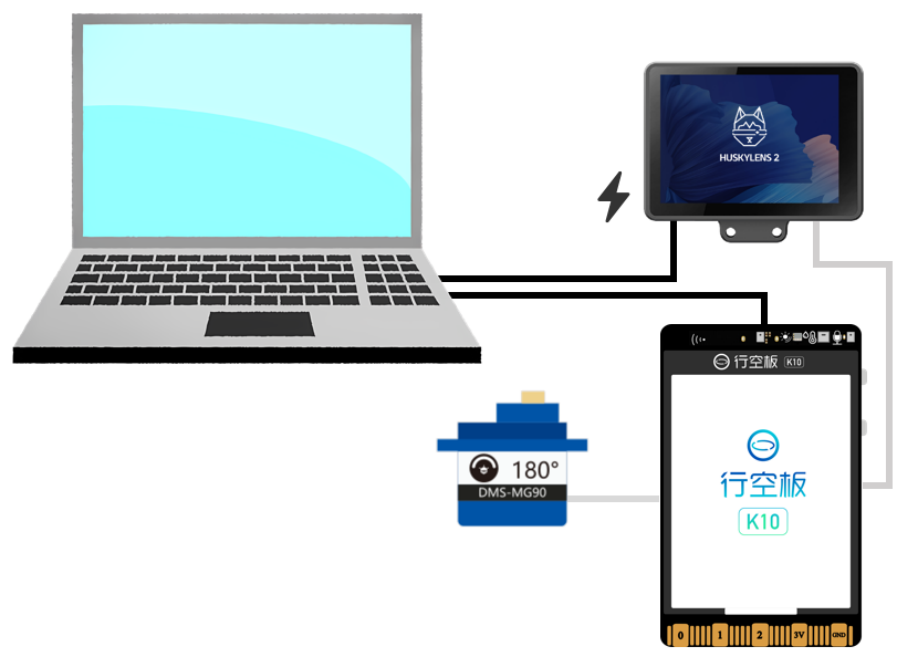
请按照下方连接图,将电脑、行空板K10、二哈识图2进行连接,舵机连接在行空板K10的P1口。
3.3软件平台准备
官网下载安装Mind+ 2.0及以上版本安装包,安装完成后,双击打开。

4.项目制作
4.1二哈识图2操作
首先,由于出厂语言默认为英文,我们可以用触屏的方式左右滑动,找到“System Settings”(系统设置)图标,将系统语言设置成自己想要的语言(支持英文,中文简体和中文繁体)。

点击进入“System Settings”,下滑至底部找到“Language”选项。点击“Language”,进入设置语言界面。

点击自己想要的语言选项。之后,系统会切换语言并自动返回至菜单页面,如下图是切换为中文简体的示意图。

其次,选择二哈识图2的通信方式。
二哈识图2支持UART(串口)和I2C两种通信方式,本教程中使用I2C通信模式。
点击“系统设置”->协议种类->选择I2C通讯模式后返回主菜单界面。

最后,滑动屏幕,找到“物体识别”功能。

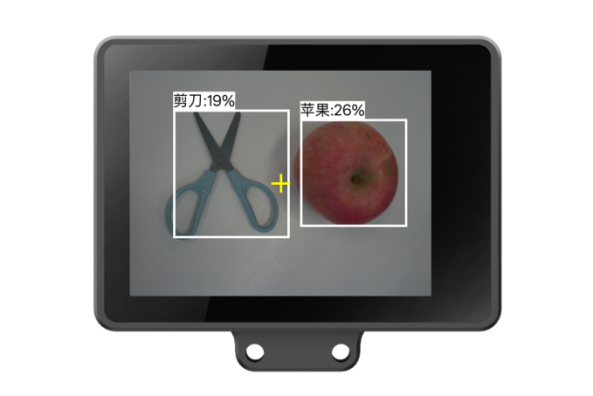
将二哈识图2“看”向可识别的物体,观察二哈识图2的屏幕,画面中所有可识别的物体将被白色方框框出,并显示对应物体名称及置信度。在机器学习中,置信度指的是模型对自己预测结果的“确定程度",比如"苹果 26%",表示在物体识别功能下模型认为当前画面中的该物体有26%的可能性是“苹果”。
二哈识图2中的参数配置以及模式选择完成后,接下来需要让该模型学习多个物体,用以触发寻找常见物品操作。步骤如下:
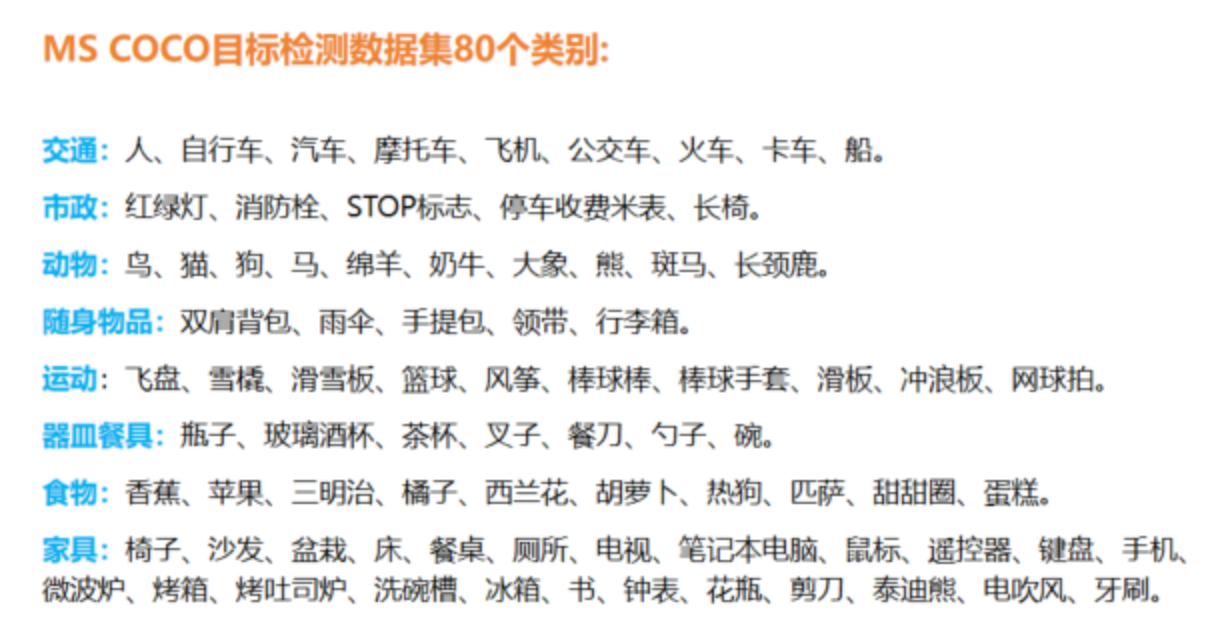
用户可针对80类中的任意物体进行学习,系统会按学习顺序分配唯一ID号,后续可通过ID号在项目程序中执行逻辑判断。
将二哈识图2“看”向目标物体,白框框住物体后,调整二哈识图2“看”的角度,使屏幕中间的"十"字光标位在白框内,可按下二哈识图2右上角的A键,学习该物体。

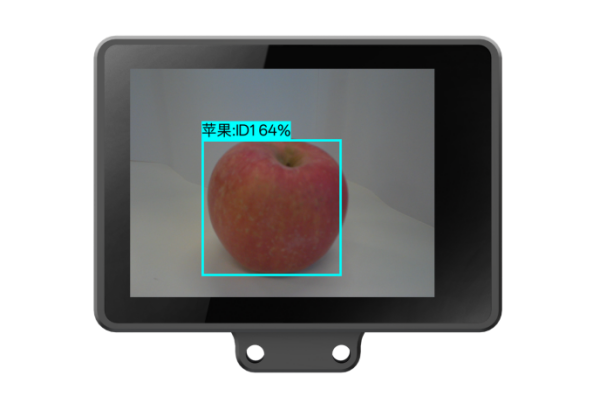
学习完成后,如识别到已学习的物体,屏幕将以彩色方框框出该物体,并在物体上方显示“name: IDx 置信度”。例如“苹果:ID1 64%”。学习更多物体,可以此类推。
二哈识图2的更多详细使用方法见下面的网址:
https://wiki.dfrobot.com.cn/_SKU_SEN0638_Gravity_HUSKYLENS_2_AI_Camera_Vision_Sensor
所有物体学习完成后,即可开始编写代码,实现一个基于物体识别的盲人常见物品寻找机。
4.2代码实现
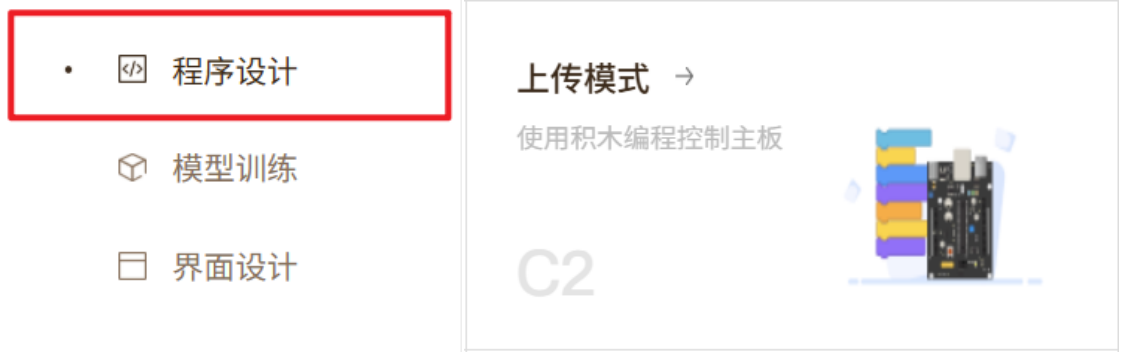
打开编程软件Mind+,选择“程序设计”中的“上传模式”。
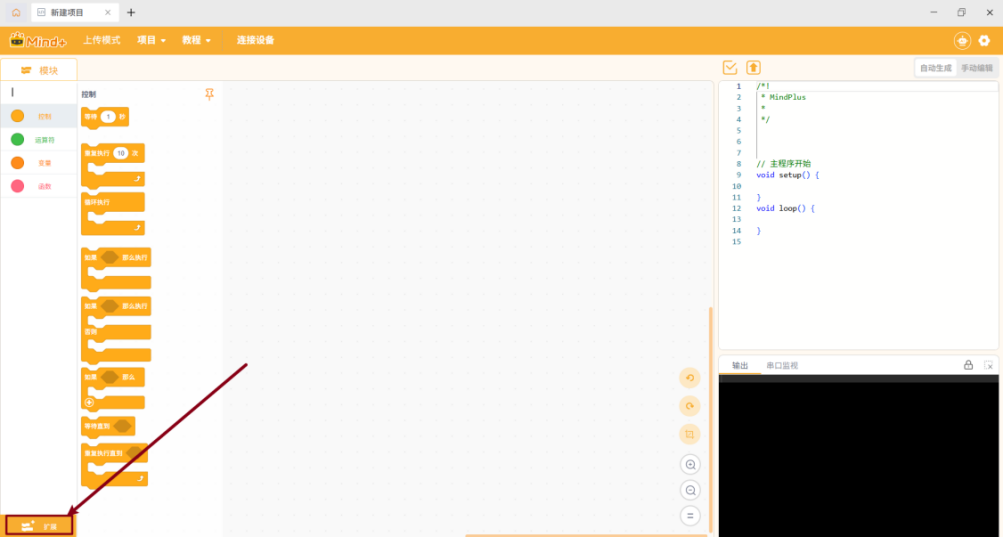
首先,我们需要在Mind+中添加相应的扩展,包括行空板K10、二哈识图2、舵机模块。
进入“扩展”页面并搜索“行空板K10”。
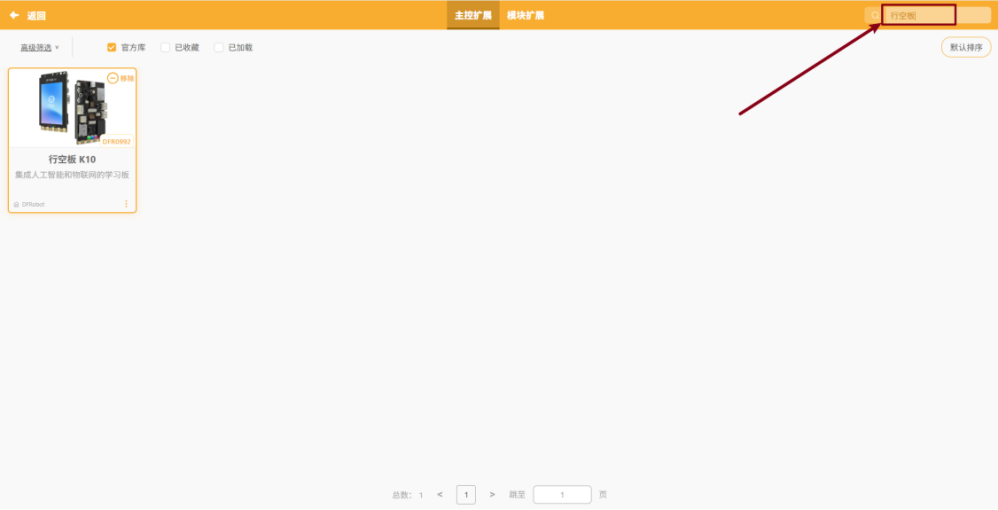
点击扩展包上的“下载”按钮,等待下载完成。

点击该扩展包完成加载。

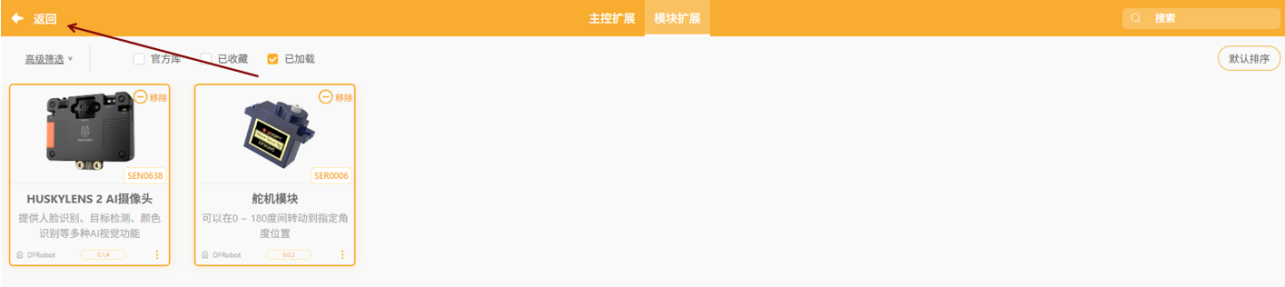
按照加载“行空板K10”的步骤加载用户库“Huskylens2 AI摄像头”、“舵机模块”。

“行空板K10”、“Huskylens2 AI摄像头”以及“舵机模块”的用户库加载完毕后,
点击“返回”按钮返回编程界面。
在连接设备中点击“连接”。
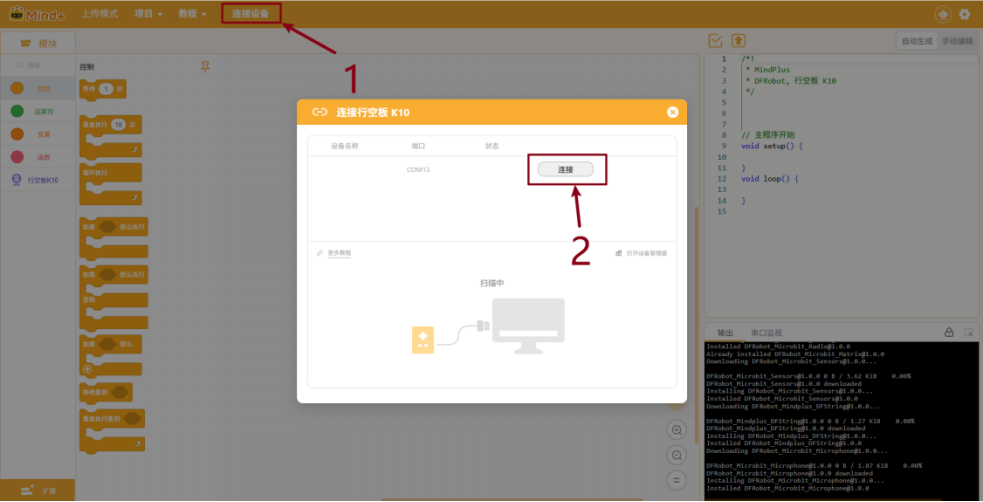
连接成功界面如下,点击“×”返回。

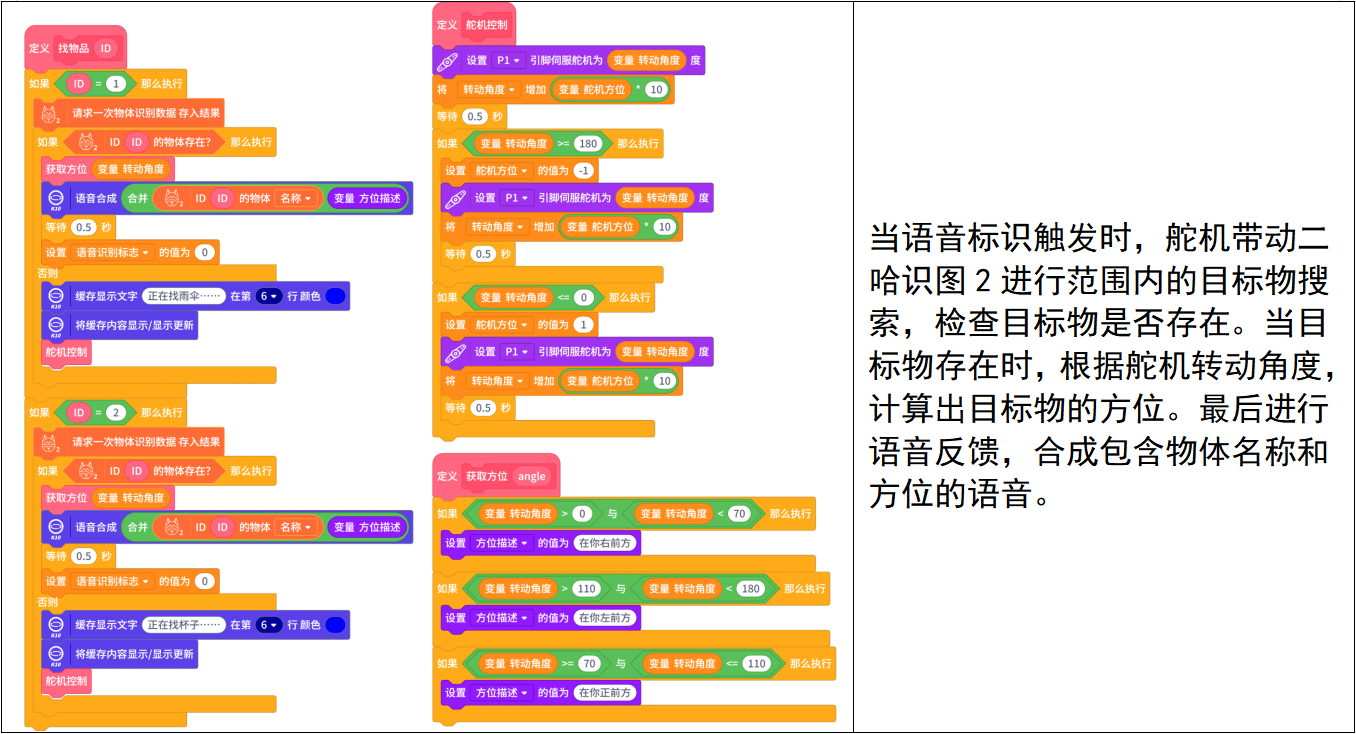
设备连接成功后,编写程序如下:

核心代码解析如下:

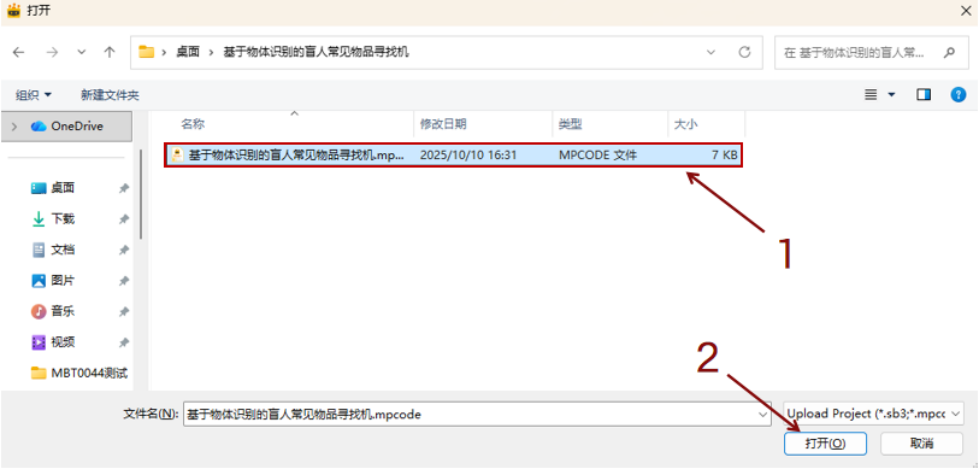
附件中有该项目的完整程序文件,展开项目,点击“打开项目”。

选择附件中的项目,并点击“打开”。
点击“上传到设备”运行程序。
实现效果如下:

5.附件清单



















 4379
4379

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









