



使用的是RobotStudio 6.08虚拟机器人环境。
新建工程
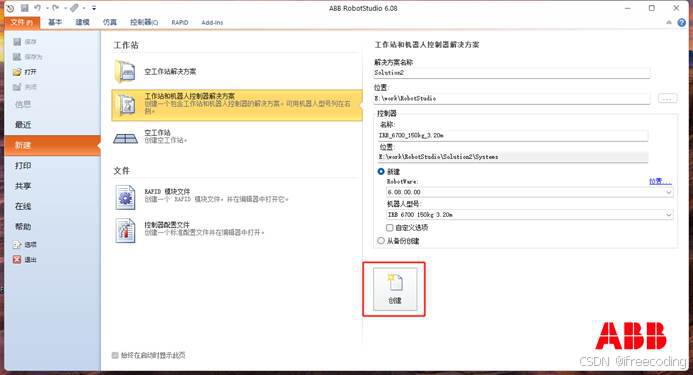
打开RobotStudio软件,按照下图创建工程。该工程里选择的机器人是IRB 6700。
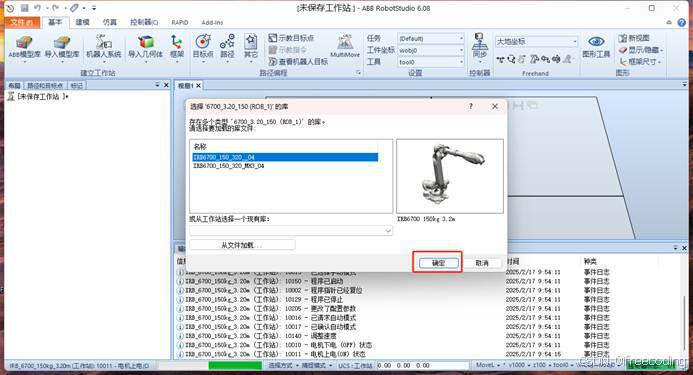
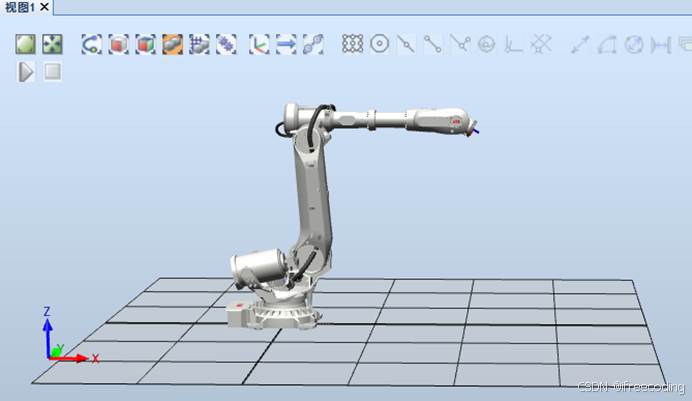
之后主界面中就会有一台机器人。
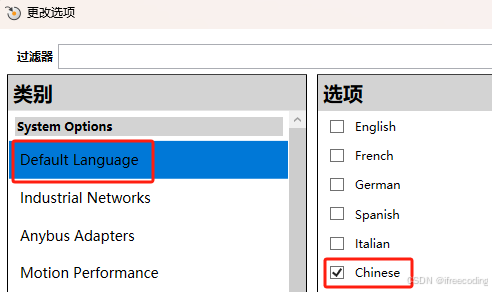
下面修改示教器界面为中文。

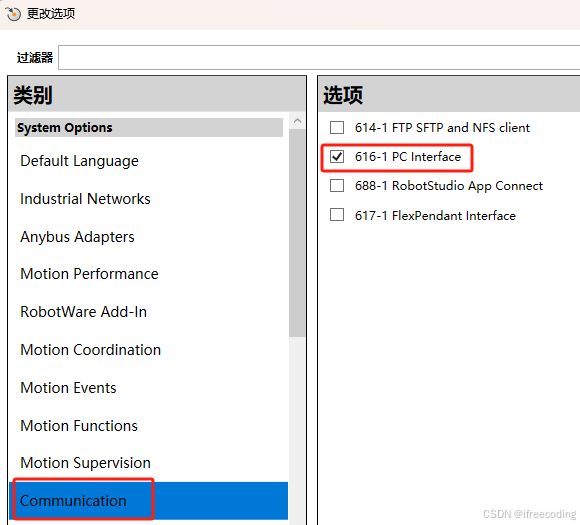
如果需要PC机控制机器人,需要为机器人增加PC接口,如下图。
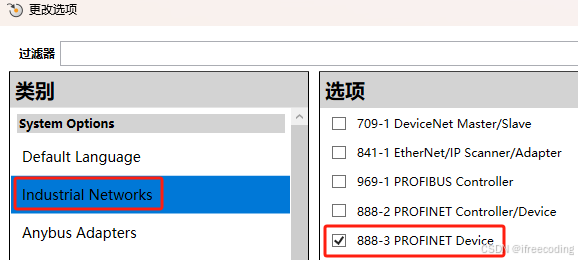
下图为机器人增加profinet驱动接口,如果单纯使用RobotStudio仿真则不需要增加。
修改完毕点击“确认”,弹出下面窗口选择“是”。
添加外部轴
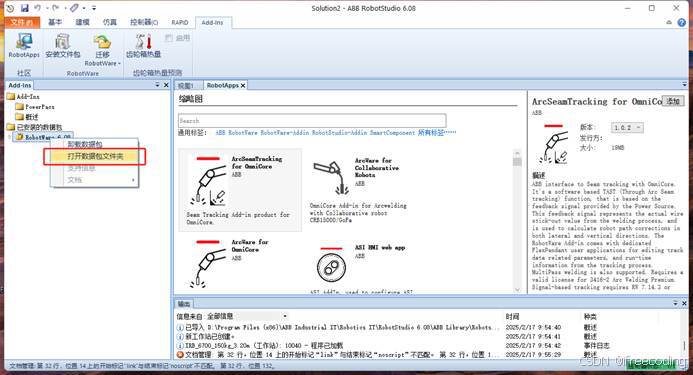
接下来为机器人添加外部轴,参照下面图片找到外部轴配置文件的安装位置。
C:\ProgramData\ABB Industrial IT\Robotics IT\DistributionPackages\ABB.RobotWare-6.08.0134\RobotPackages\RobotWare_RPK_6.08.0134\utility\AdditionalAxis\Track\DM1\M7L1B1T_DM1.cfg
将配置文件M7L1B1T_DM1.cfg复制到工程目录中:
E:\work\RobotStudio\Solution2\Systems\IRB_6700_150kg_3.20m\HOME
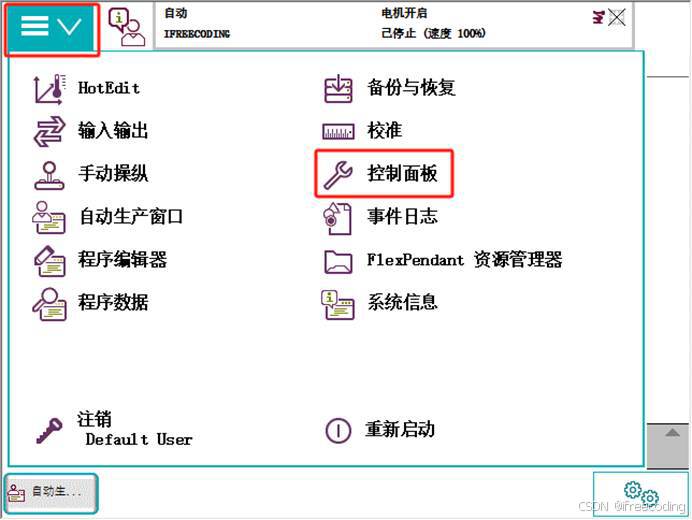
接下来打开示教器,在示教器中导入外部轴配置文件。
将示教器置为手动模式。

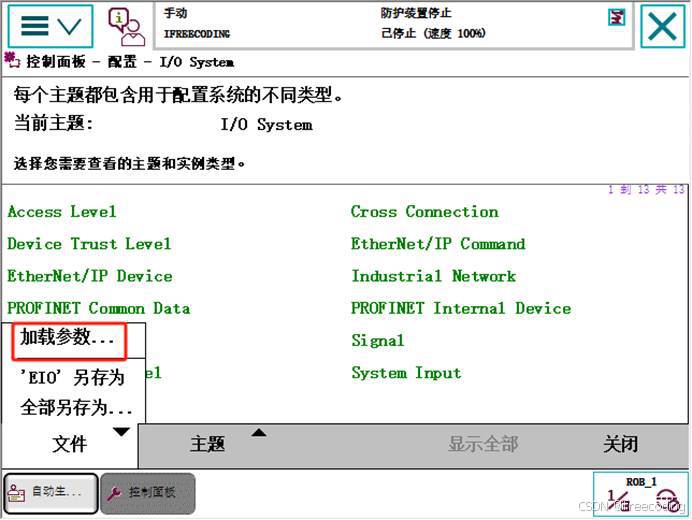
加载配置参数。

点击下图“加载参数...”选中M7L1B1T_DM1.cfg文件。
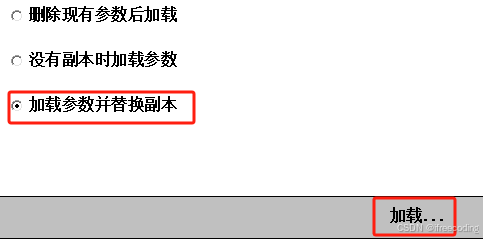
加载配置参数后会重启控制器,在RobotStudio界面会弹出添加外部轴导轨的界面,如下面图所示。

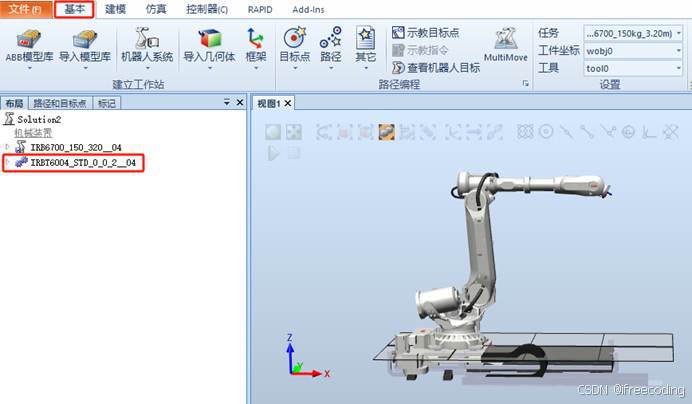
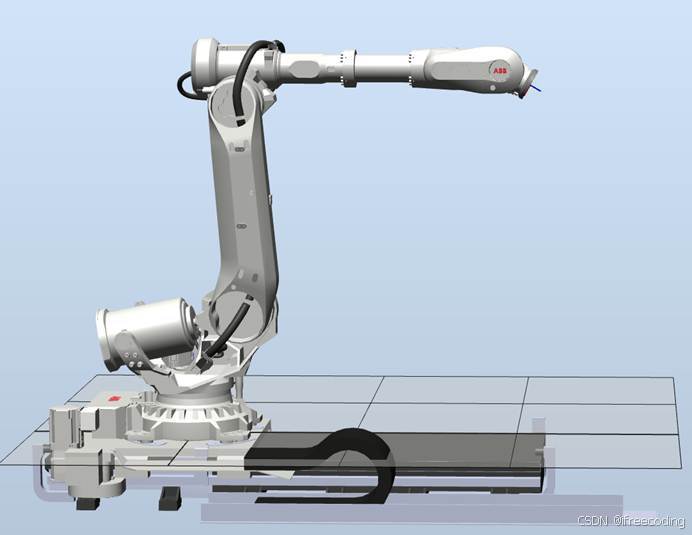
添加完外部轴导轨后在RobotStudio主窗口中可以看到新加的导轨了,该导轨由外部轴控制,只能实现一个维度的运动。
左侧树形结构显示了机器人IRB6700和导轨IRBT6004。按左键点击机器人IRB6700拖到导轨IRBT6004上便可将机器人安装到导轨上,导轨运动时可带动机器人一起运动。
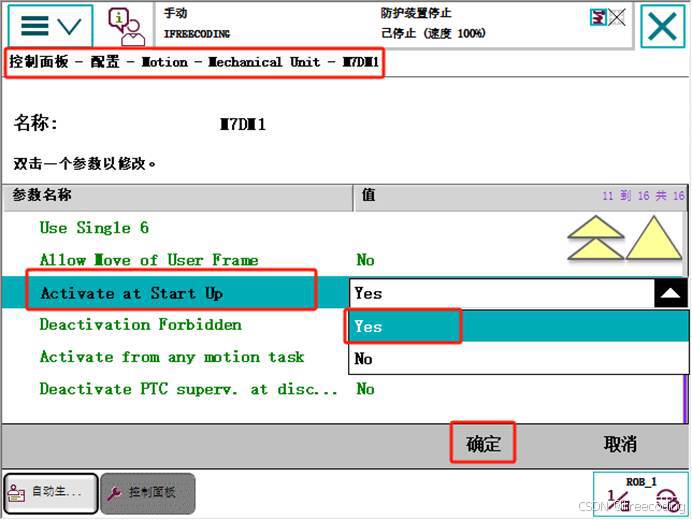
重新打开示教器,设置为手动。将“控制面板-配置-Motion-Mechanical Unit-M7D1”下参数“Activate at Start Up”置为“Yes”。该设置会在机器人启动时自动给外部轴上电。

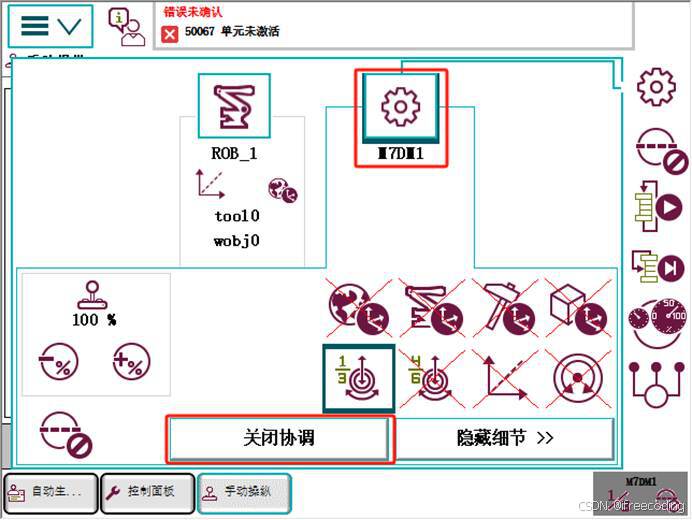
外部轴相对机器人的6轴是后加的,在机器人的外部,机器人原有6轴可以联动,为了使外部轴能与机器人的6轴一起联动需要确保是“开启协调”状态。该按钮有时会隐藏,可通过下面方法显示出来。

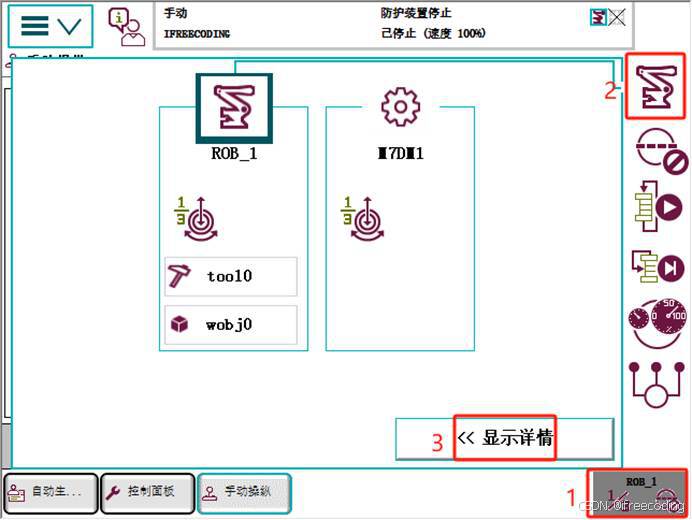
下图中3或4二选一。
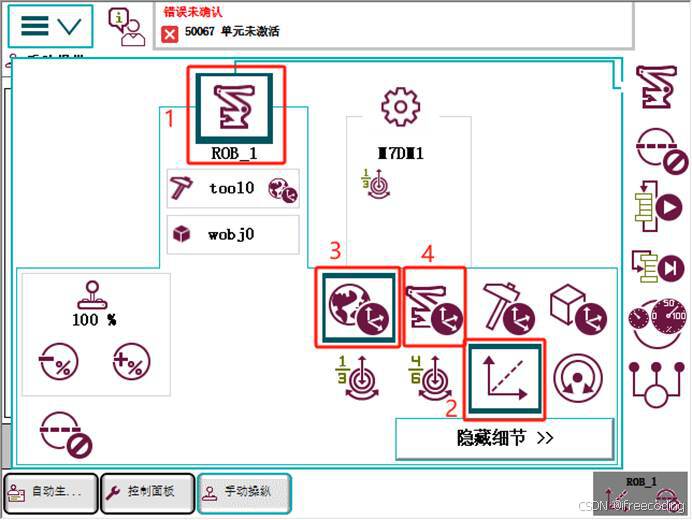
然后按下图选择,之后便会出现“关闭协调”按钮,再次点击会显示“开启协调”。
要保证系统处于开启协调状态,也就是按钮显示“关闭协调”。
编写程序
经过上面步骤外部轴就设置好了,下面编写机器人程序来验证外部轴动作。


此时机器人的位置和姿态如下图所示,将当前的位姿记录到了MoveJ指令中。
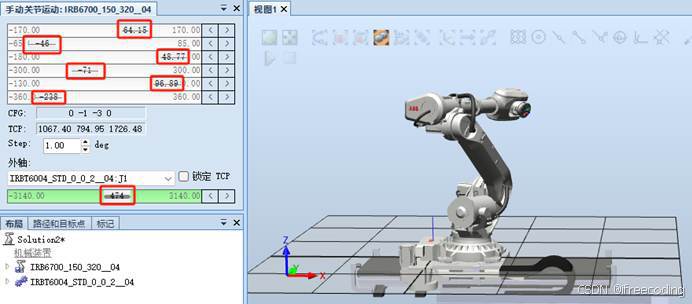
下图调节机器人的7轴(内部6轴+外部1轴)改变机器人的位姿。右键点击机器人IRB6700,按照下图操作。
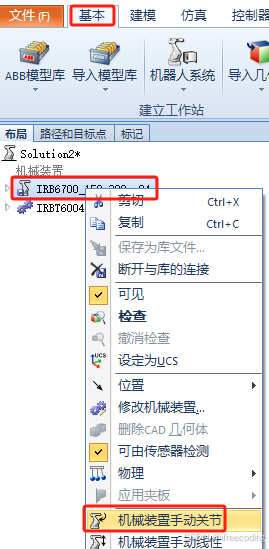
在打开的窗口中拖拽7个轴的滑块控制7个轴的运动来改变机器人位姿,改变后的位姿如下图所示。
然后在示教器中再插入一条MoveJ指令,记录下来当前的7轴数据。
可以重复上述动作再移动到第三个点并添加MoveJ指令,如下:

经过上述操作我们已经保存了3个位置的机器人数据,我们每执行一条指令时机器人会协调7轴联动使机器人走到当前MoveJ指令中的位置。
我们先使用手动方式调试。需要在示教器中置为“手动模式”,并将电机置为“Enable”状态。

然后将program point移至main函数。

点击下图示教器按钮,在RobotStudio窗口就可以看到机器人在这3个点之间运动了。

还可以切换为自动模式,在RobotStudio中仿真运行。


成果展示
机器人运动视频在下面附件中。
使用PC机控制机器人
还可以由PC机与机器人通信来控制机器人,下面程序使用ABB机器人的PC SDK2024库封装了AbbRobotPcSdkProgram类。执行下面程序同样可以实现上面的机器人动作。

其它
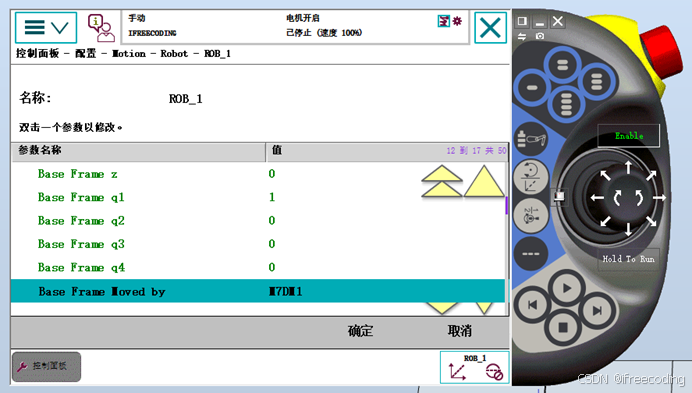
对于实体外部轴,通过下图将机器人安装到外部轴导轨上,外部轴移动时会改变机器人的基础坐标系。
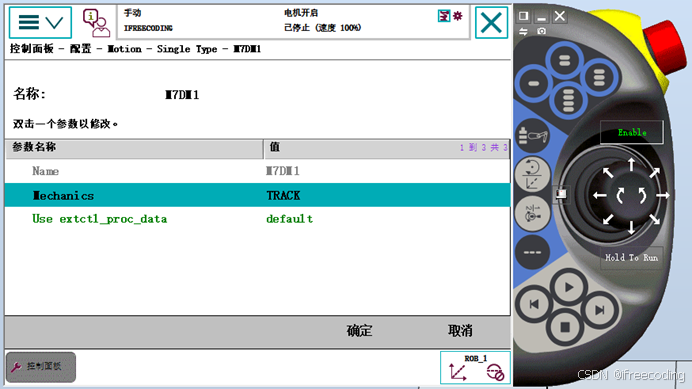
下图是将导轨设置为直线运动。
下图可配置外部轴减速比。


















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









