




 本文介绍如何使用MoveIt在RViz中进行机器人运动规划。主要内容包括启动演示并配置插件、设置可视化选项、使用交互功能、规划运动路径以及保存配置。
本文介绍如何使用MoveIt在RViz中进行机器人运动规划。主要内容包括启动演示并配置插件、设置可视化选项、使用交互功能、规划运动路径以及保存配置。
MoveIt 教程【2】——MoveIt Quickstart in Rviz
1. 运行Demo并配置插件
roslaunch panda_moveit_config demo.launch rviz_tutorial:=true
- 加载panda机器人:
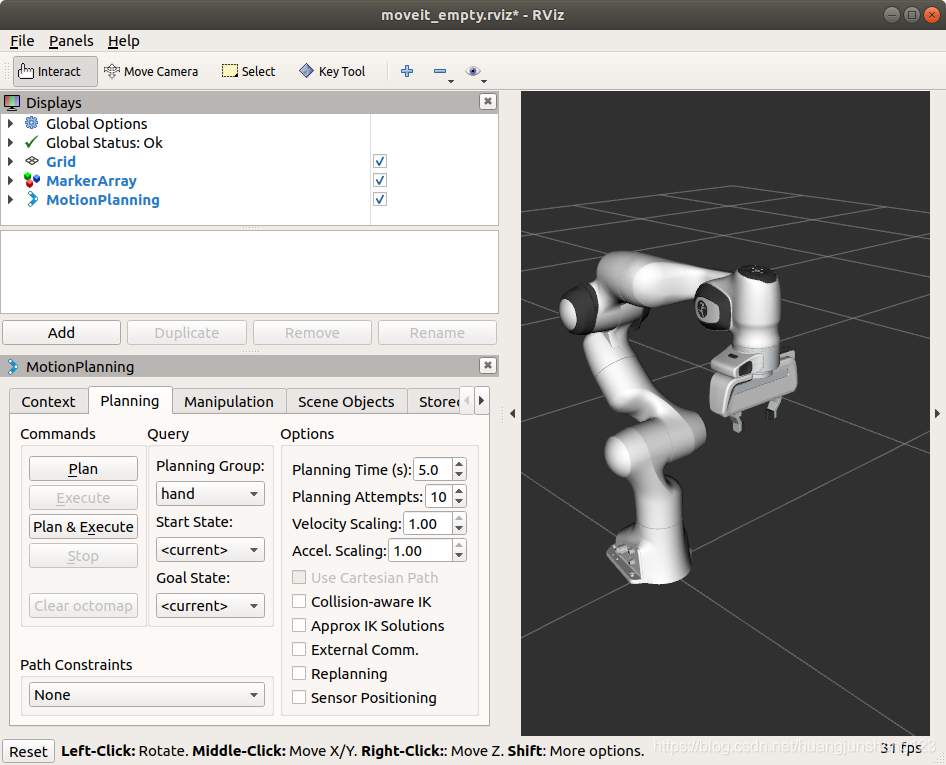
 - 发现什么也没有,添加
- 发现什么也没有,添加Motion Planning插件,这次有了 Panda 机械臂模型
 按照官网配置一下,出现交互球
按照官网配置一下,出现交互球
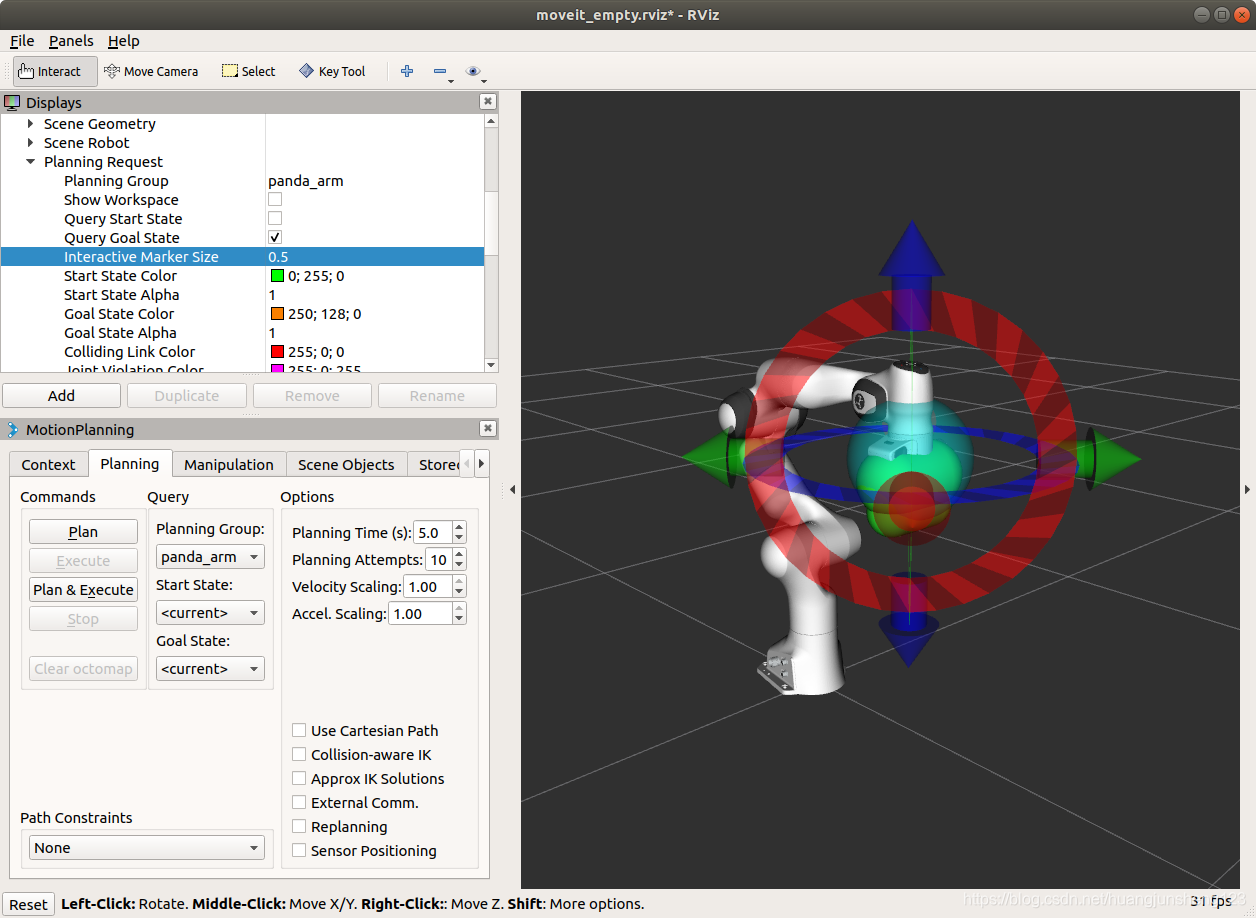
2. 设置可视化选项
MotionPlanning中有四种不同的可视化选项:
- 机器人本身3D模型 (默认打开),可在
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 3377
3377

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









