ros安装caffe anaconda2之后roscore无法执行
最新推荐文章于 2025-03-21 20:43:24 发布







 在Ubuntu16.04系统中,ROS安装Caffe和Anaconda2后,roscore无法正常运行,提示没有rosmaster.master_api模块。通过特定操作后,打开新终端运行roscore可恢复正常。
在Ubuntu16.04系统中,ROS安装Caffe和Anaconda2后,roscore无法正常运行,提示没有rosmaster.master_api模块。通过特定操作后,打开新终端运行roscore可恢复正常。
部署运行你感兴趣的模型镜像
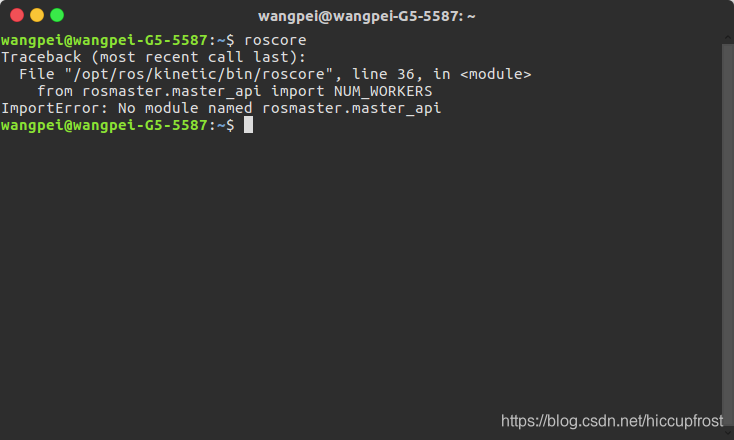 Ubuntu16.04 ros在安装caffe之后,roscore无法正常运行,显示没有rosmaster.master_api的模块。
Ubuntu16.04 ros在安装caffe之后,roscore无法正常运行,显示没有rosmaster.master_api的模块。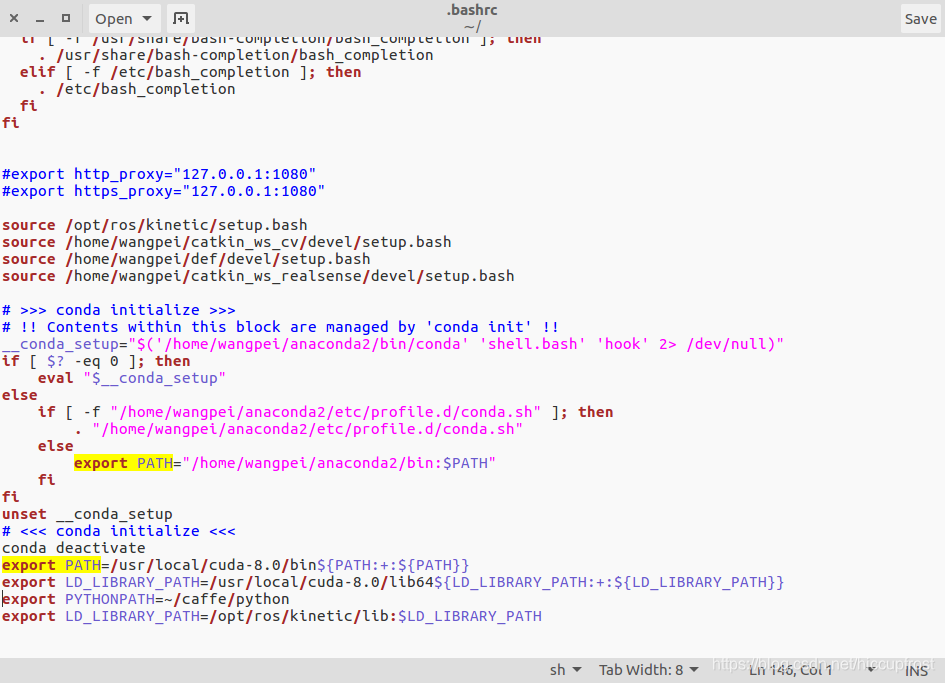 将
将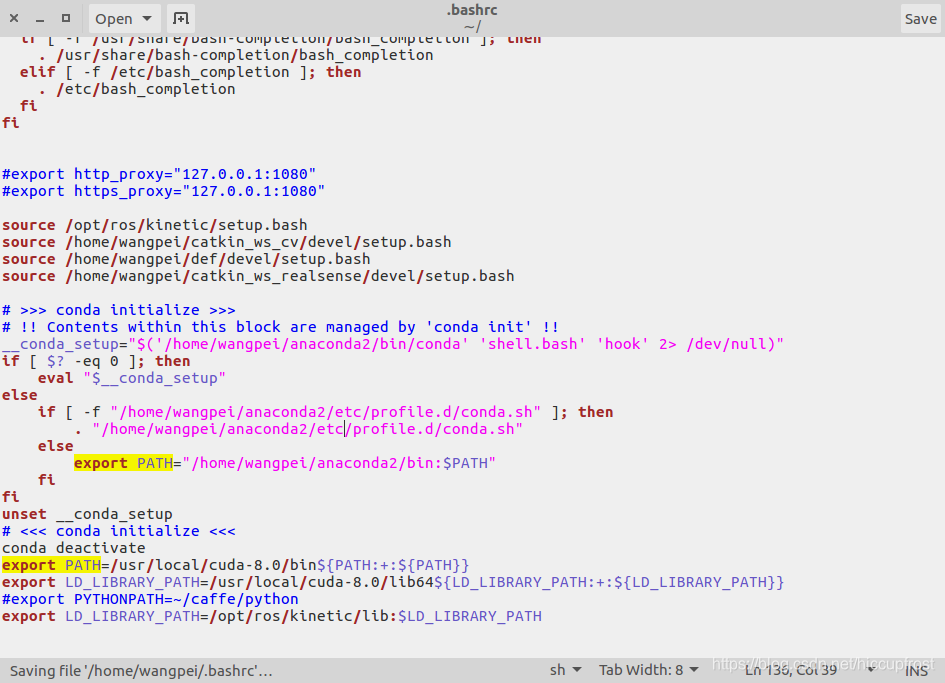 之后打开新的终端:运行roscore
之后打开新的终端:运行roscore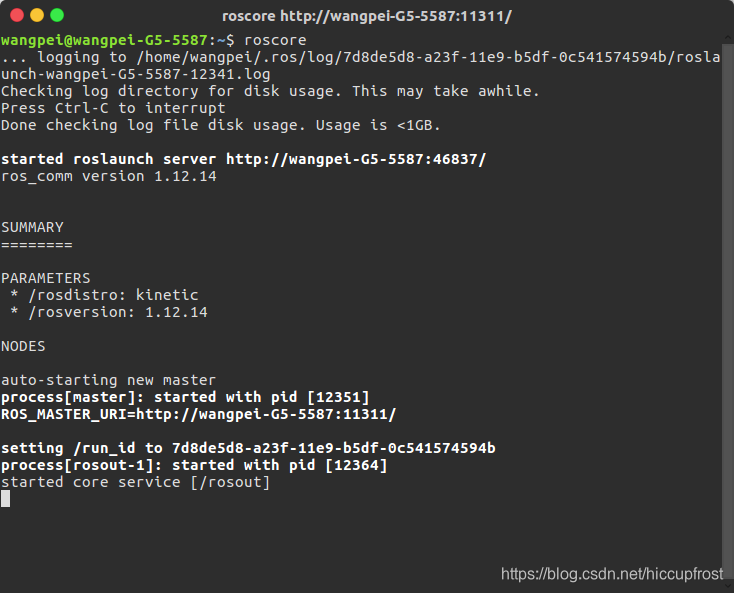
您可能感兴趣的与本文相关的镜像

Python3.8
Conda
Python
Python 是一种高级、解释型、通用的编程语言,以其简洁易读的语法而闻名,适用于广泛的应用,包括Web开发、数据分析、人工智能和自动化脚本

















 2279
2279

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









