




1.路径决策
以 host(ego) 在 reference line 的投影为坐标原点,建立 frenet 坐标系
找到规划起点:
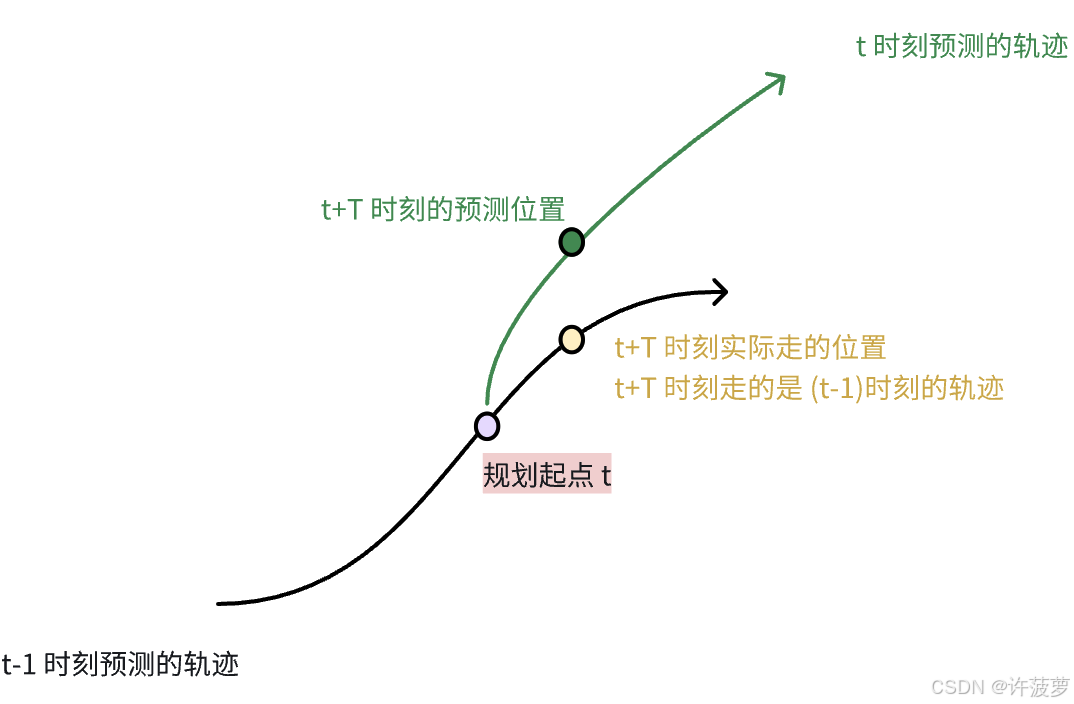
为了保证控制的连续性,规划的起点为 t+T 时刻
如下图所示,如果规划起点选择在 t 时间的点,绿色的线为 t 时刻预测的轨迹,在 t+T 时刻自车应该在绿色点的位置。但是,控制在 t 时刻拿到的是 (t-1) 时刻的轨迹,在 t+T 时刻控制随着 (t-1) 时刻的轨迹走到黄色的点,这就造成了控制的不连续性
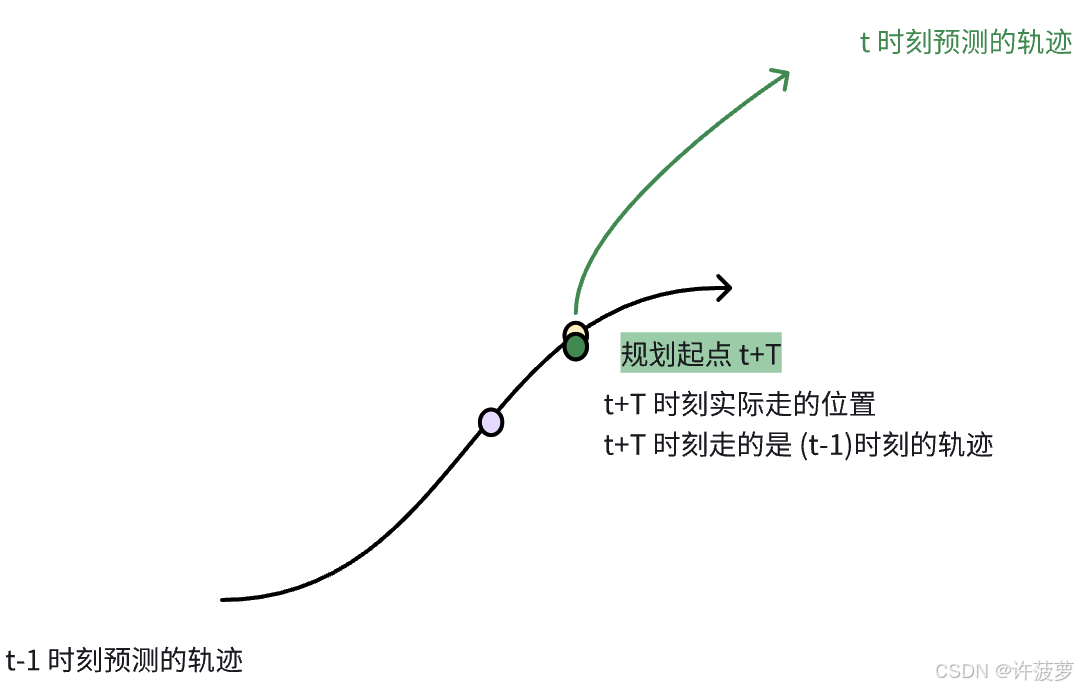
如下图所示,规划的起点在 t+T 时刻,控制还是走 (t-1) 时刻的轨迹,那么在 t+T 时刻,规划的轨迹和控制走的点是一样的,所以 t 时刻规划的起点要是 t+T 时刻
2.寻找最优路径标准
最优路径标准:平滑,与障碍物保持适当距离,贴近参考线,下图中这条粉色的线就没有贴近参考线

有障碍物的二次规划是非凸的,如下图所示,这个车有多重方法可以绕过这个树:

代价函数如下图所示,代价函数值最大的位置就是代价函数最大的地方:

2.1 撒点法
每隔一定的米数撒一些点,寻找每个点的最优路径,这个路径就叫粗径:

然后基于这些粗径进行第二次的规划,解出一条最优路径:

如何在离散空间上找到粗解:动态规划
如何在凸空间上优化出最终解:二次规划
3.动态规划
3.1 计算每个路径的代价函数
如何判断生成轨迹的质量,需要用到代价函数:

平滑代价解释:
s 代表弧长,期望弧长越平滑越小,但是对该期望求积分比较困难,所以就简化为每个离散点的积分

障碍物距离代价:
相当与对障碍物画了两个圈,外圈是 d1,内圈是 d2 ,当在 (0,d2) 范围内接近于无穷大

最终就可以求出每个起点终点的最短路径

3.2 找到最短路径
可以使用迪杰斯特拉算法求出图的最短路径,也可以使用动态规划的方式:
现在要计算出 P0 —> P12 or P22 or P32 哪种代价最小,笨方法是计算
P0–>P12,计算 P0—>P22。。。
但是动态规划可以先将 P0—>P11 ,P0—>P21 ,P0—>P31 的结果进行保存然后再计算计算后面的结果,这样就减去了一部分计算量

4.轻决策与轻决策
为什么不使用粗规划(动态规划)的结果作为最终结果:因为粗规划是使用离散撒点的方式找到最优路径,撒点的方式本身就不是最优解
动态规划是一种决策的手段,相当于找到一段凸空间,然后再从这个凸空间中进行二次规划找到最优路径
二次规划是一个五次多项式,约束可以写成下图:

动态规划与决策的关系

4.1 重决策

为什么人为给定的空间有可能是非凸空间:
下面的两个蓝色的框是障碍物,人为可能会规划的空间是非凸空间

重决策优点:

4.2 轻决策

轻决策缺点:

4.3 重决策与轻决策的应用


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









