




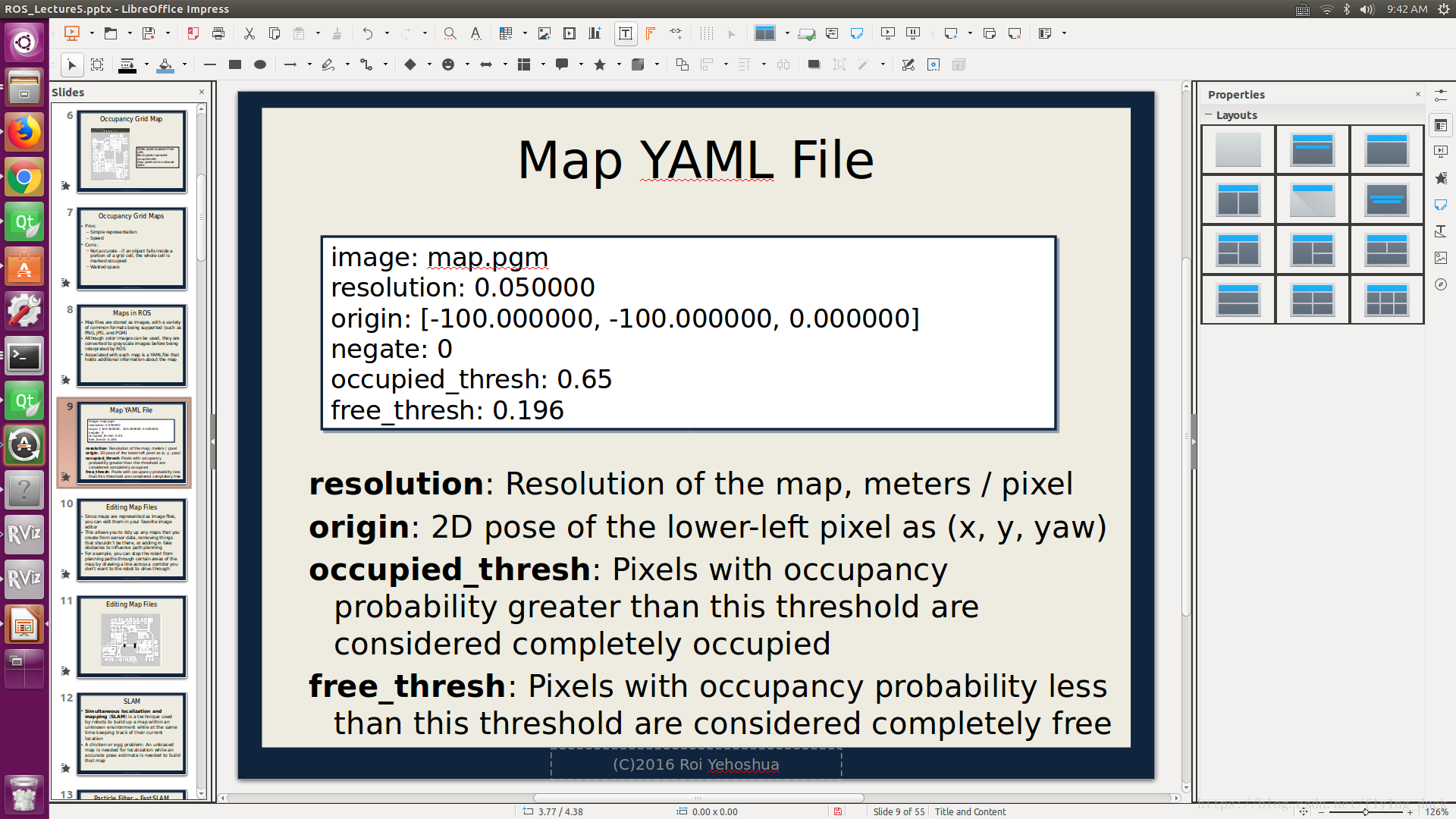
1.Map files are stored as images, with a variety of common formats being supported (such as PNG, JPG, and PGM)
2.Although color images can be used, they are converted to grayscale images before being interpreted by ROS
3.Associated with each map is a YAML file that holds additional information about the map
You can use tf to determine the robot's current location in the world
• To get robot’s location in its own coordinate frame create a TF
listener from the /base_footprint to the /odom frame

















 324
324

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









