




 本文介绍了开源自动驾驶软件Autoware,重点提及了其在ROSCon2017上的展示,利用12辆车连续7天生成3D城市点云地图。内容涉及到使用NDT进行扫描匹配,以及将点云转换为正态分布进行处理。作者还提到点云数据处理的挑战,并将自己的直方图匹配算法应用于分类问题。
本文介绍了开源自动驾驶软件Autoware,重点提及了其在ROSCon2017上的展示,利用12辆车连续7天生成3D城市点云地图。内容涉及到使用NDT进行扫描匹配,以及将点云转换为正态分布进行处理。作者还提到点云数据处理的挑战,并将自己的直方图匹配算法应用于分类问题。
这是autoware的用户手册,感兴趣自行下载
https://github.com/CPFL/Autoware-Manuals
这个lidar是3d 64线的, 我之前记得在roscon2017上autoware的presentation 有说过,是用的12辆车 连续7天绘制的3d urban city point cloud 图,那时候看贼吉尔炫
这里只提到了scan matching 这是用的比较常见的NDT吧 随便google 找了一篇paper
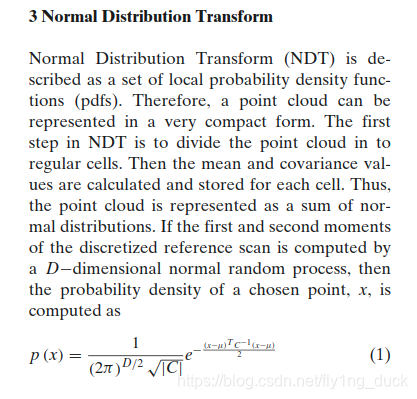
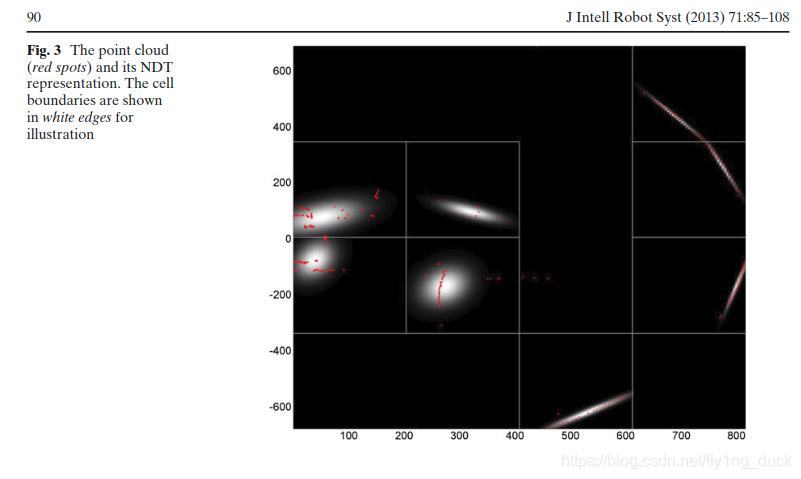
处理点云一个很大的问题就是数据太密集而难分轻重,图片的pixel也是一样,我想卷积神经网络也是这个道理吧,这里是把一个点云团transform为 normal distribution,其实 normal distribution or pdf 也就是一个直方图只不过直方图是离散的罢了
我之前也有写过一个直方图匹配的用作classifier的简单例子,可以在我以往的博客搜到。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 6123
6123




 到【灌水乐园】发言
到【灌水乐园】发言







