







 本文介绍了如何安装Open3D,并详细阐述了利用该库处理斯坦福兔子点云的过程,包括多角度点云拼接、近邻搜索(周围n个点、半径搜索、混合搜索)、法向量估计和生成Mesh结构化数据。通过这些步骤,实现了3D点云的深入分析和处理。
本文介绍了如何安装Open3D,并详细阐述了利用该库处理斯坦福兔子点云的过程,包括多角度点云拼接、近邻搜索(周围n个点、半径搜索、混合搜索)、法向量估计和生成Mesh结构化数据。通过这些步骤,实现了3D点云的深入分析和处理。
一、Open3D安装
直接pip install open3d即可
查询已有安装包:pip list
二、斯坦福兔子
1.生成点云
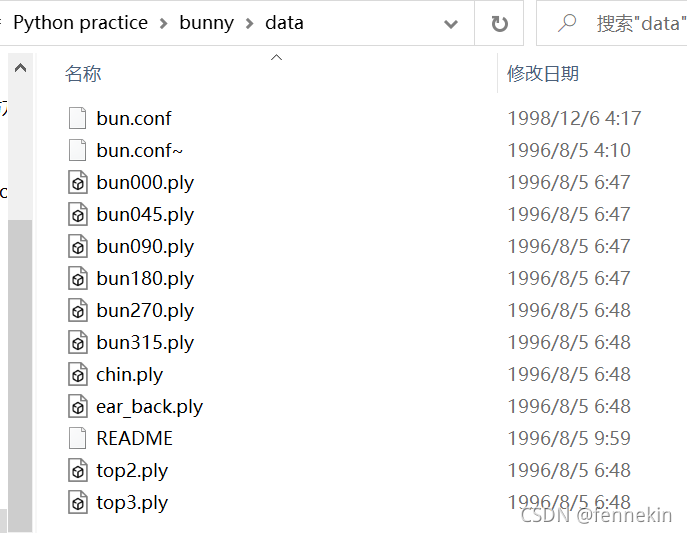
以下分别是从不同角度扫描到的兔子的点云,以bun000为例
import open3d as o3d
import numpy as np
print("Open3D read Point Cloud")
pcd=o3d.io.read_point_cloud(r"bunny\data\bun000.ply")
print(pcd)
o3d.visualization.draw_geometries([pcd],width=800,height=600)
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 3299
3299

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









