






前言:
再三思考还是出较为详细的记录,本人是win11系统,其余系统问题还请另寻他法
一、准备Qt
进入:https://www.qt.io/zh-cn/download
如图: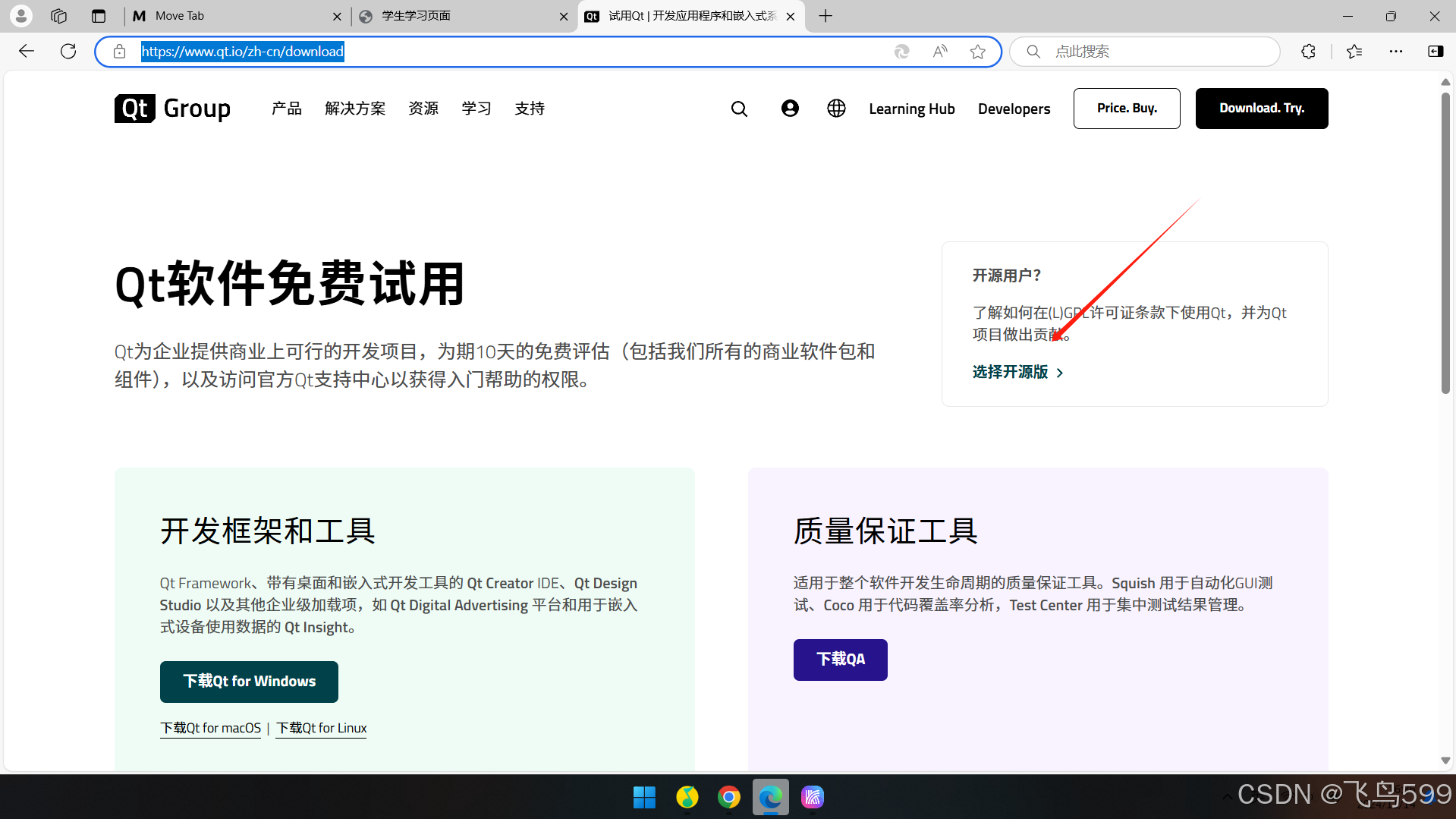
点此处,然后下滑找到: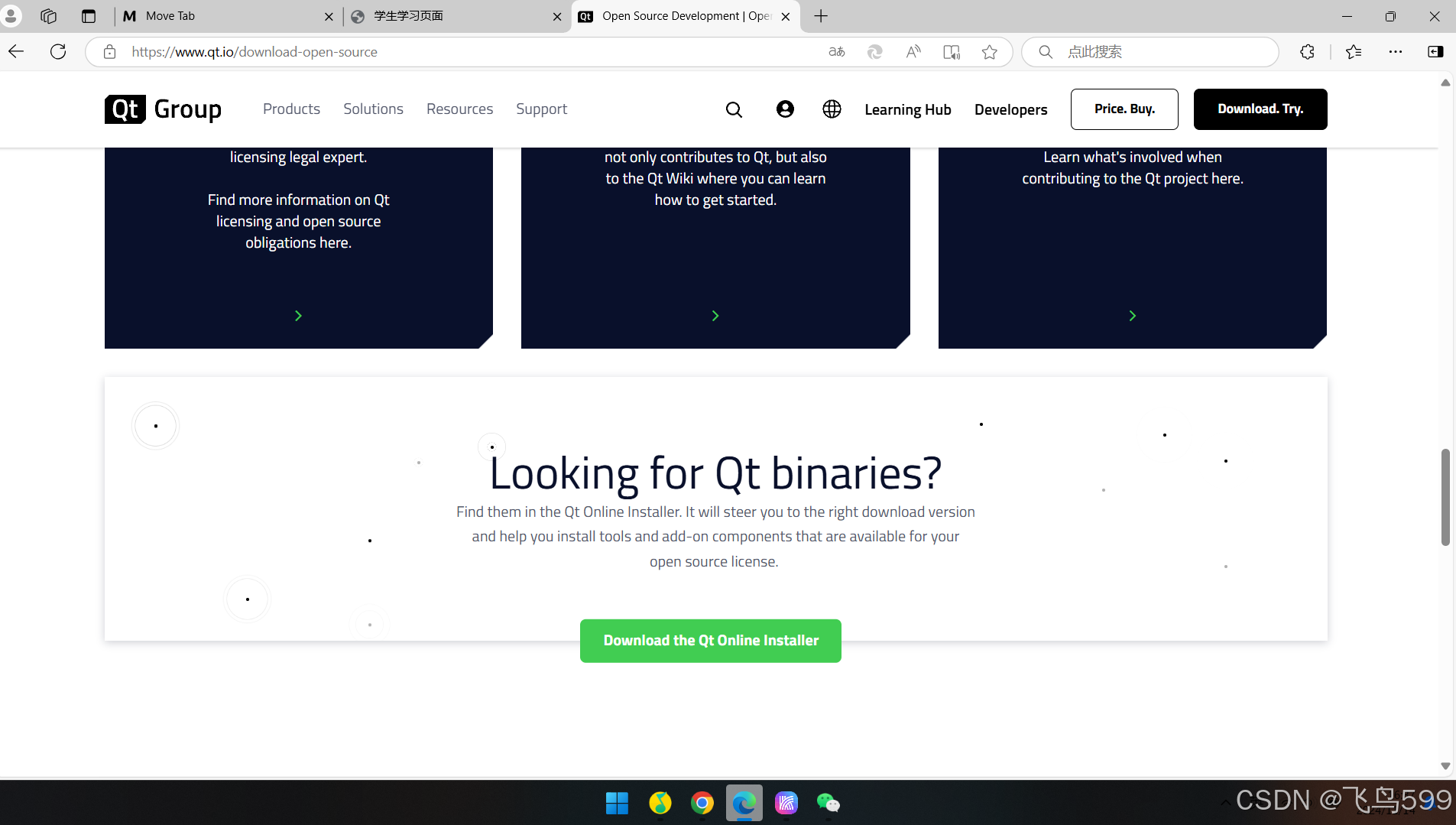
download即可。
安装好后,进入软件,注册账号,填写信息最好不要有中文,很简单,这里不多赘述了。
这里
二、换源安装(下载快一些)
也可以一开始就换源,方便些,这里疏忽了
先退掉软件,然后复制软件地址
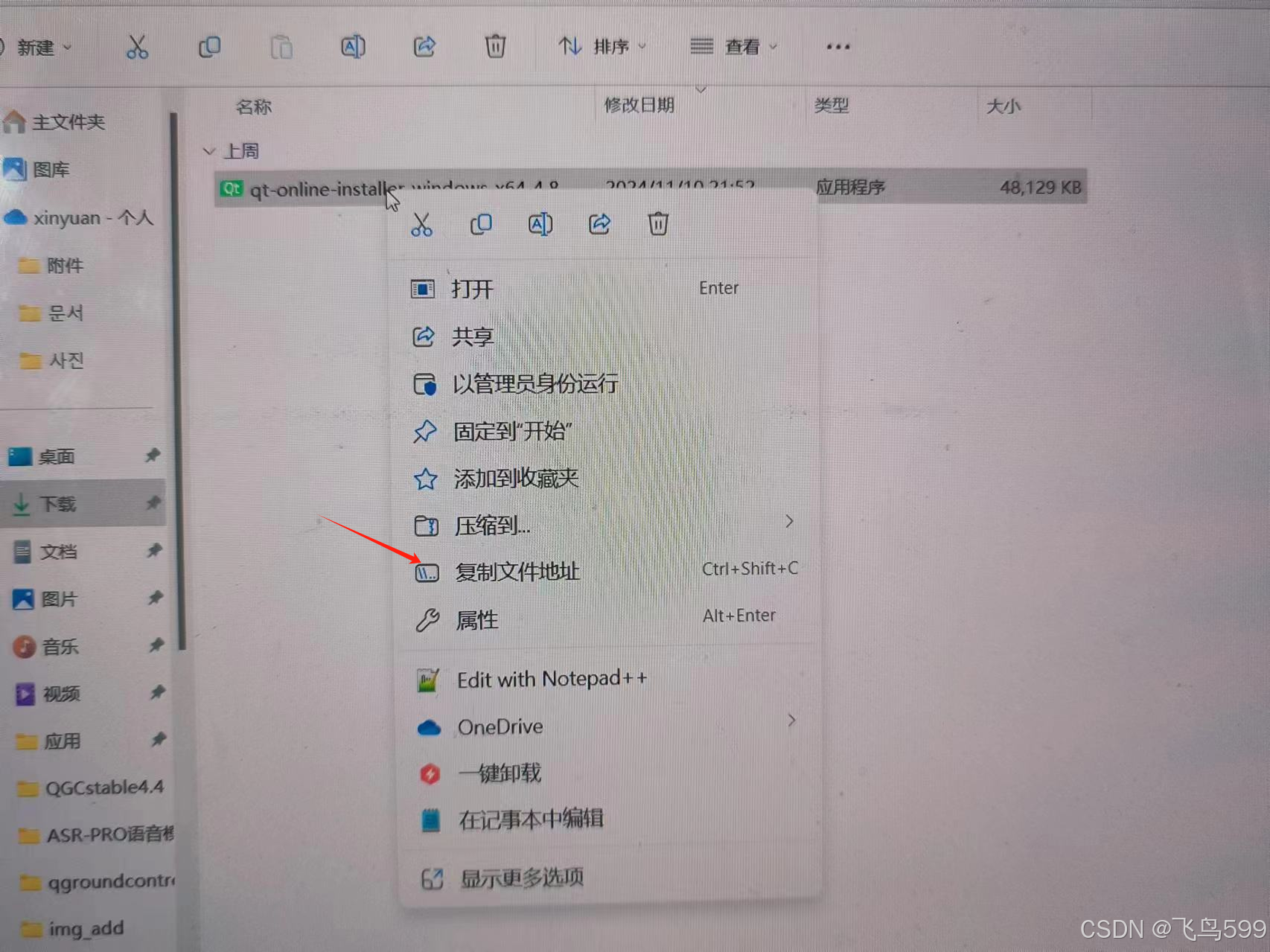
win+R, 输cmd打开终端,
注意,地址粘好后,后面留空格
接着,直接复制源,搜一下清华源,南京理工源什么什么的,很简单,我这里就直接提供了:
--mirror https://mirrors.ustc.edu.cn/qtproject
跟在地址后面:

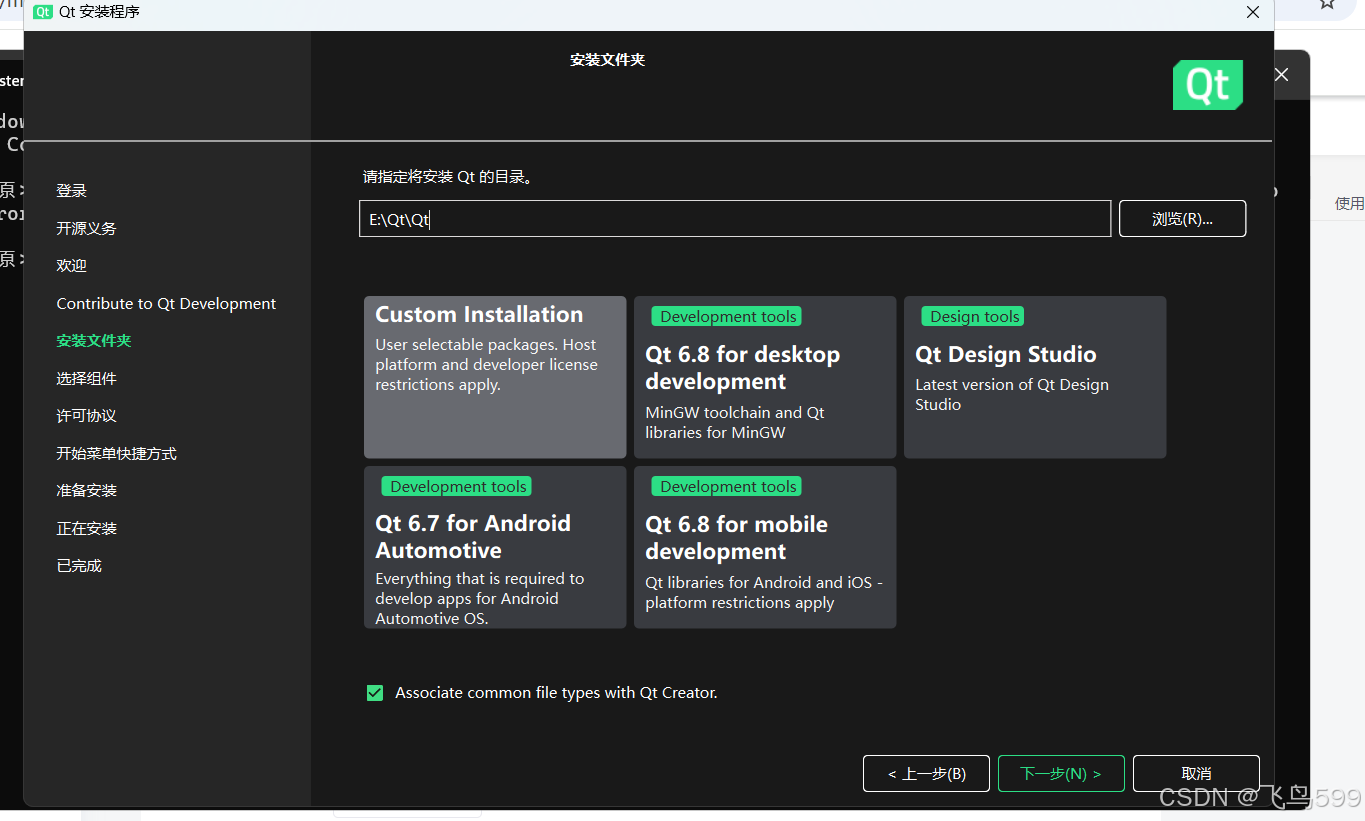
三、安装组件
首先,安装位置自己要选好,然后直接下一步
到这里,他默认会选一些东西,无须更改(有需要自己改就行了,这里默认的就行了),然后按照下图勾选:
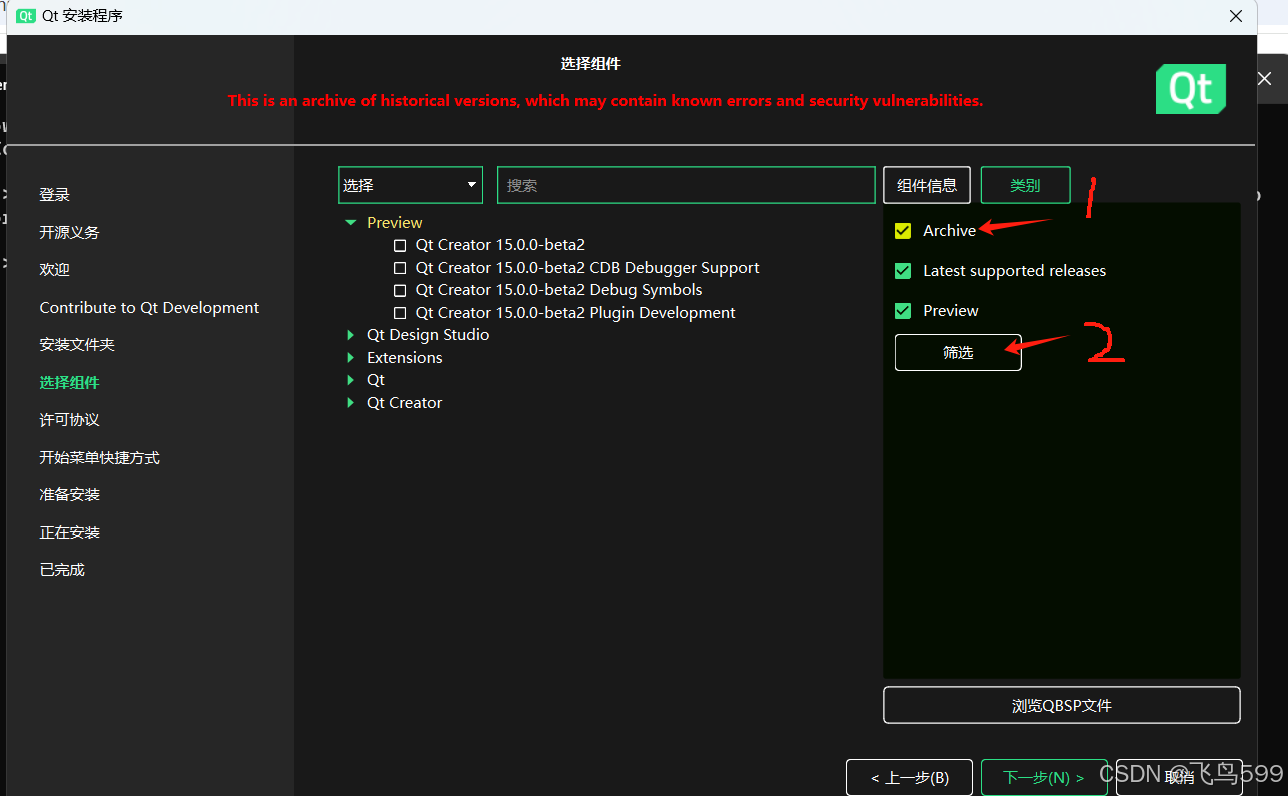
依次点击即可。
稍等片刻,然后点qt
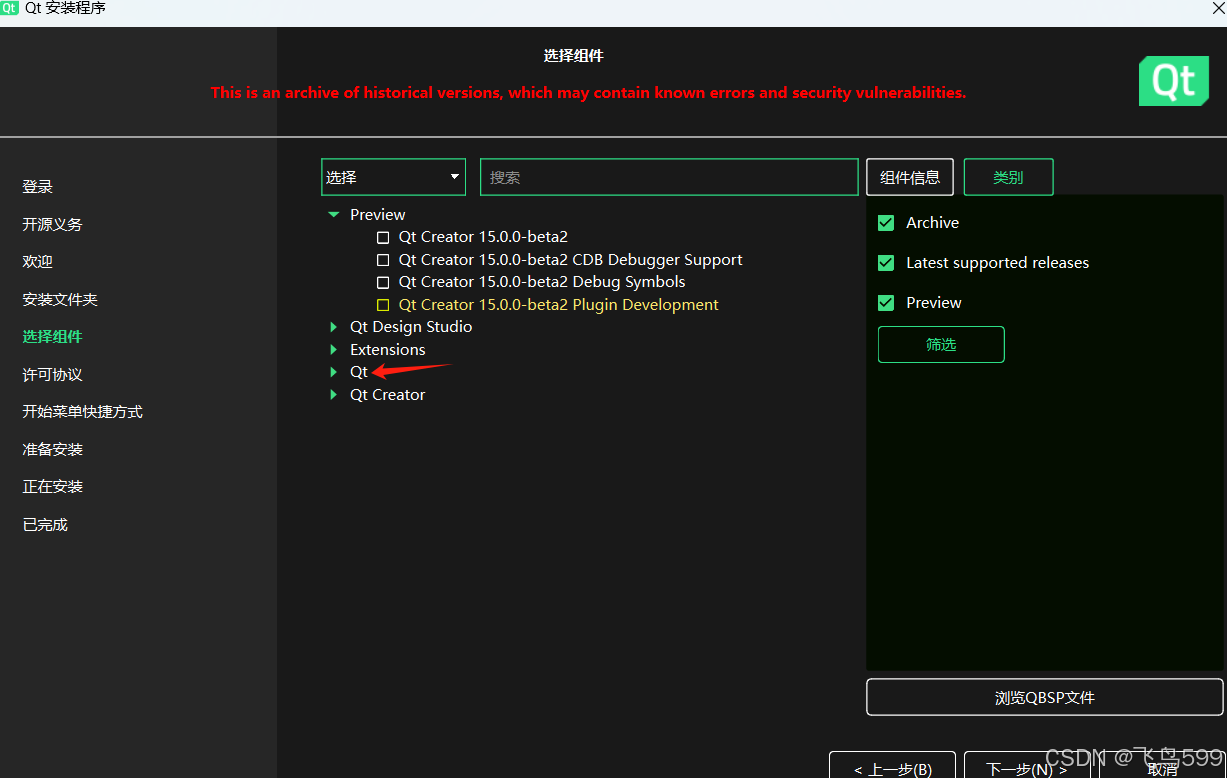
然后选这个,5.15.2(QGC4.4稳定版必须这个)
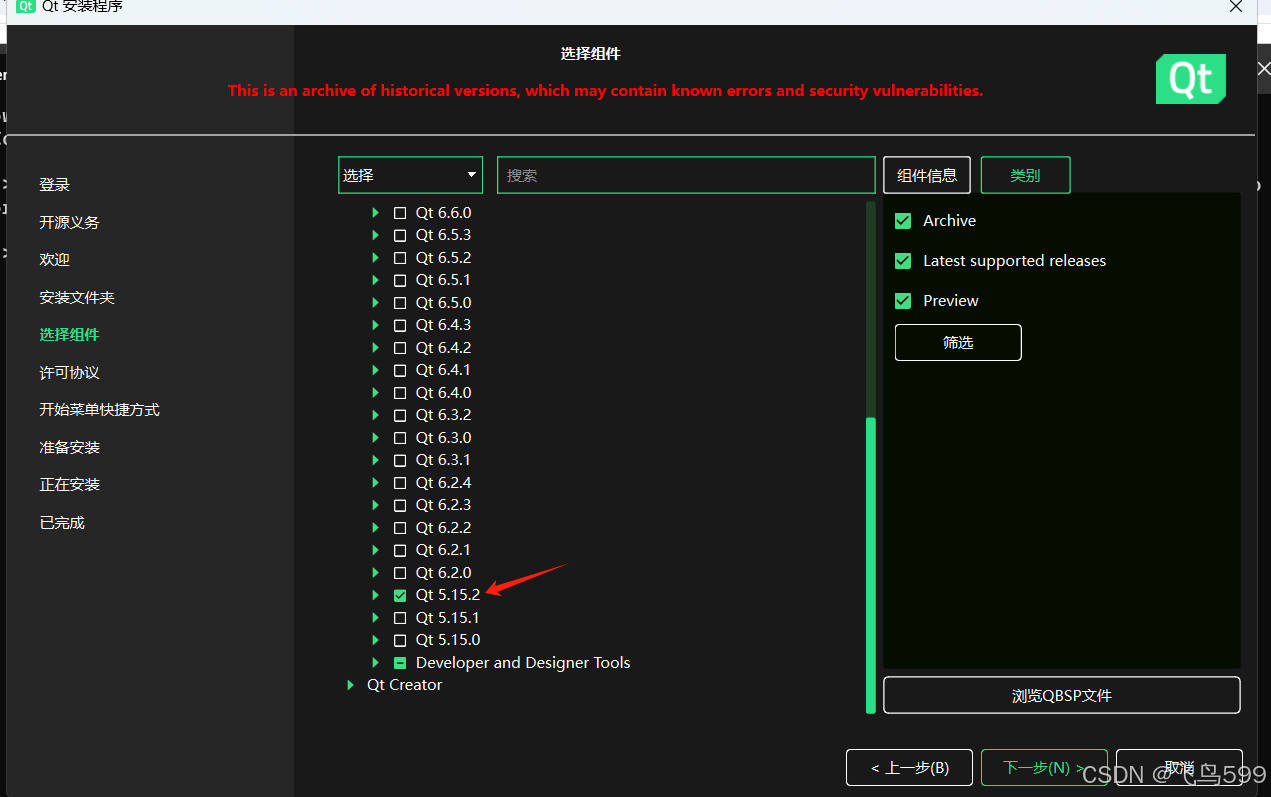
下一步,安装即可,过程中偶尔会报错,能继续就继续,别取消。
四、源码下载
方法一,自行克隆下载
安装好Git,具体操作自行搜索
然后最好在别处新建一个文件夹,存放源码(QGC源码),在新文件夹空白处,右键即可
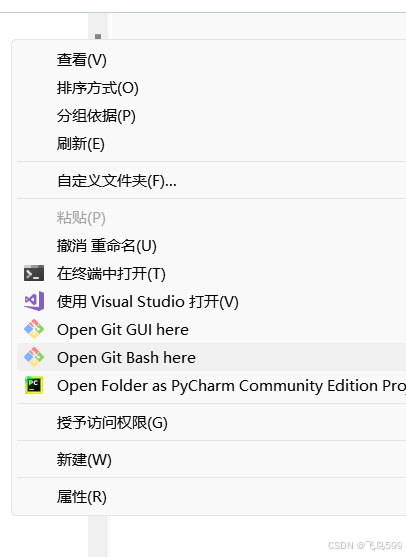
open git bash here,然后复制如下命令:
git clone -b Stable_V4.4 https://github.com/mavlink/qgroundcontrol.git
cd qgroundcontrol
git submodule update --init --recursive正常情况大约4分钟左右。
如果卡在克隆eigen很久,就先退出,删掉文件,关机重启,重新执行上面指令。
如果仍然卡在eigen,不用管它,一直等,做点别的事去。
方法二,直接下载我完整的源码
链接:https://pan.baidu.com/s/1_IMvBEkCGzIqcs0LKH4VXg
提取码:fn33
等待完成即可
五、安装visuaStudio2019
为什么是2019?根据qgc官网开发指南:
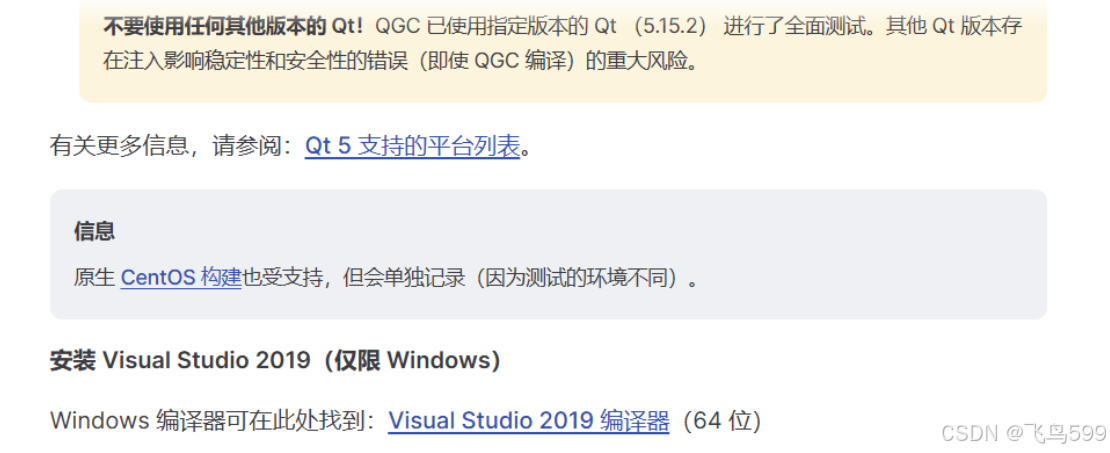
这里直接提供了:
链接:https://pan.baidu.com/s/1Q6RIlvMC6zzC-1d6kgVBHg
提取码:fn33
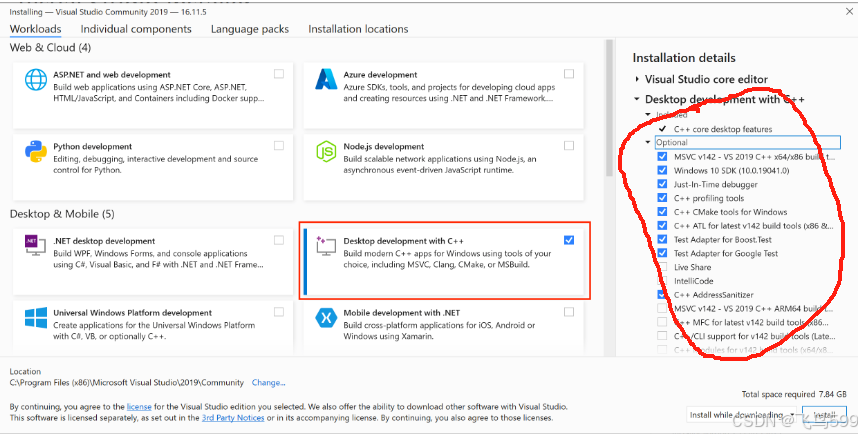
安装desktop developm with c++,右侧勾选这些:
注意,右侧下滑一下,win11SDK也勾选上,我这里原因特殊无法提供具体图文
qgc4.4开发需要就这些,其余无需勾选
后面的IDE目录,缓存目录,也更改一下为好,别在c就行。
一共三个路径,最后一个不用改
我这里原因特殊无法提供具体图文
等待完成即可
六、环境变量配置
这步可以不用,跳过,到第七步就行了
七、构建编译源码
打开qt creator,如下选择

然后打开项目,如下:
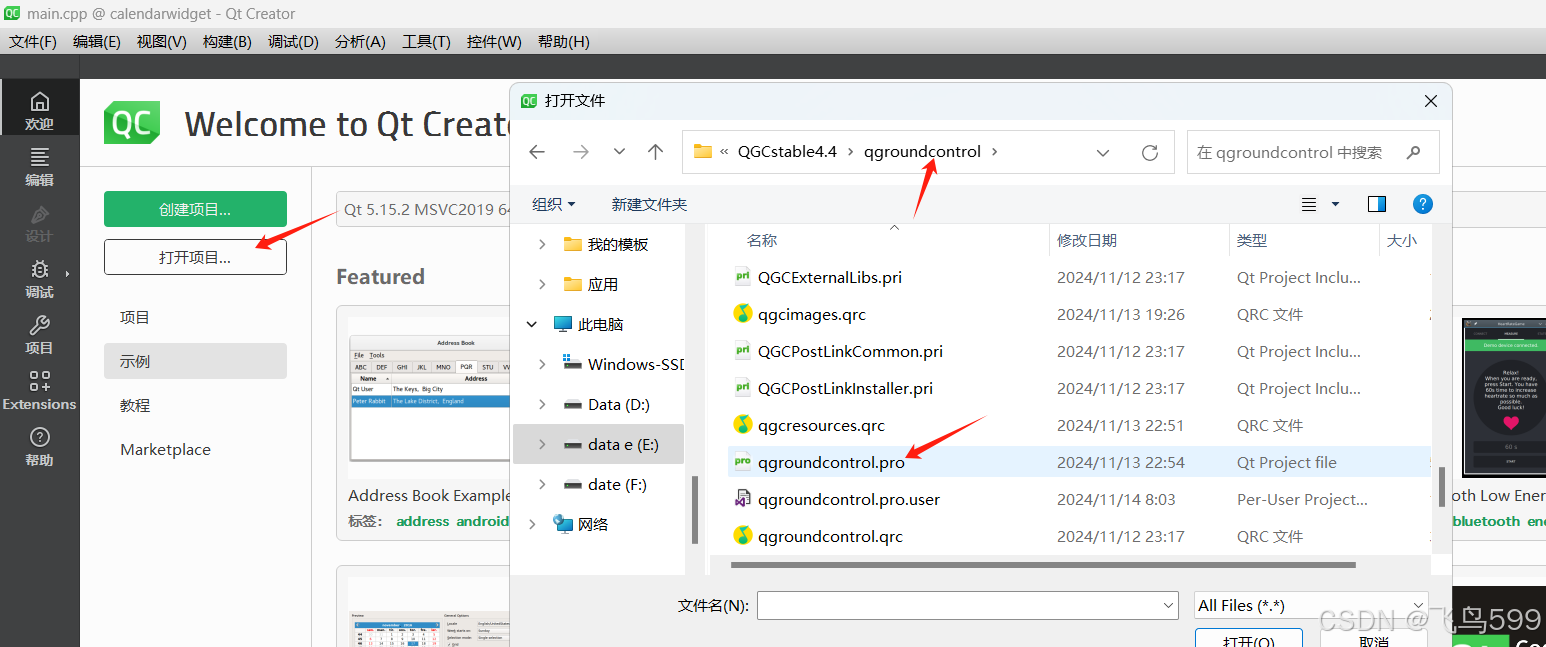
qgroundcontrol.pro那个,打开就行,如下图配置,选择5.15.2 msv2019 64位那个:
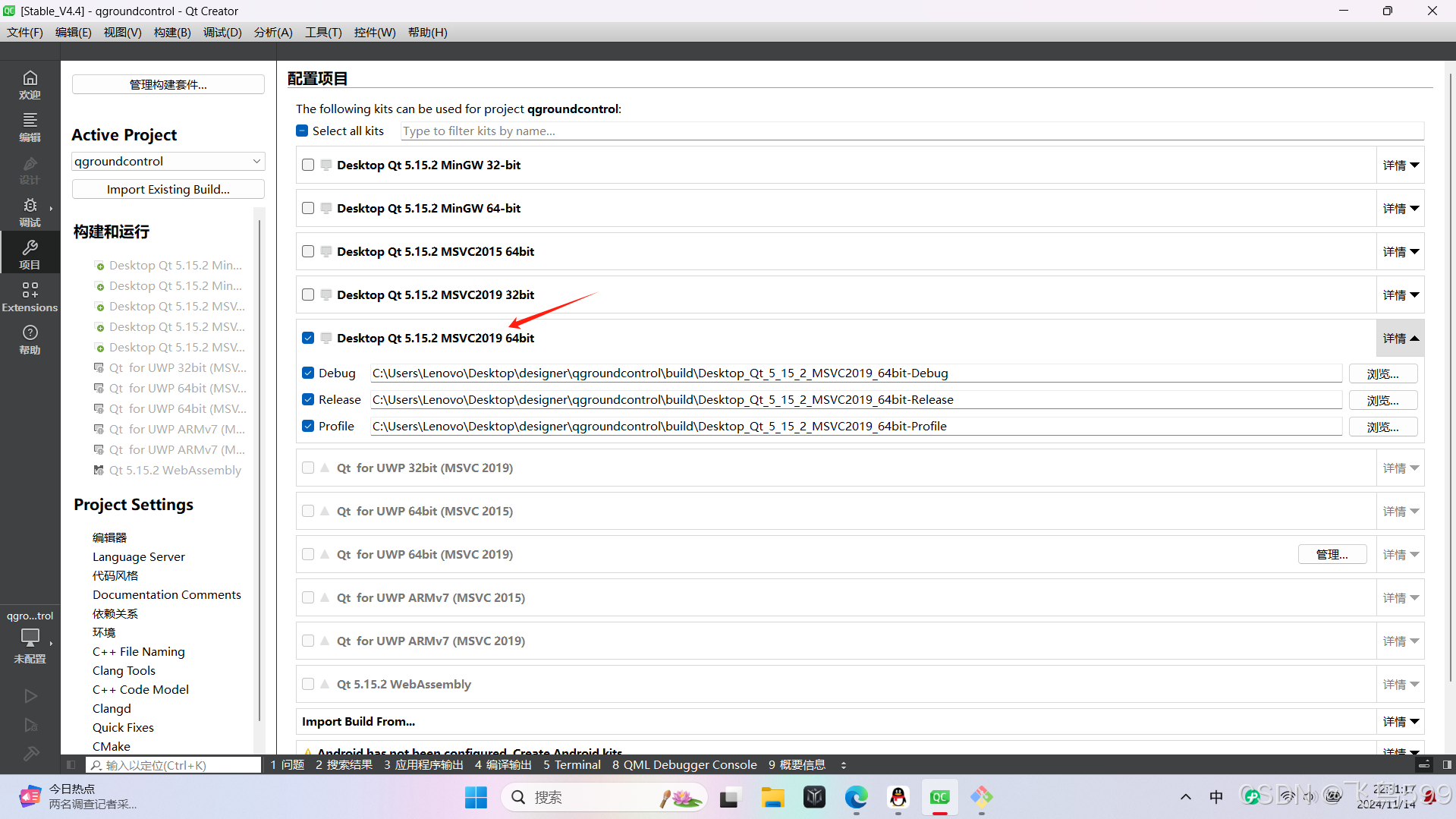
软件会加载一些东西,
等待即可,有点慢,等待他完成
完成后
点击项目,如下点击:
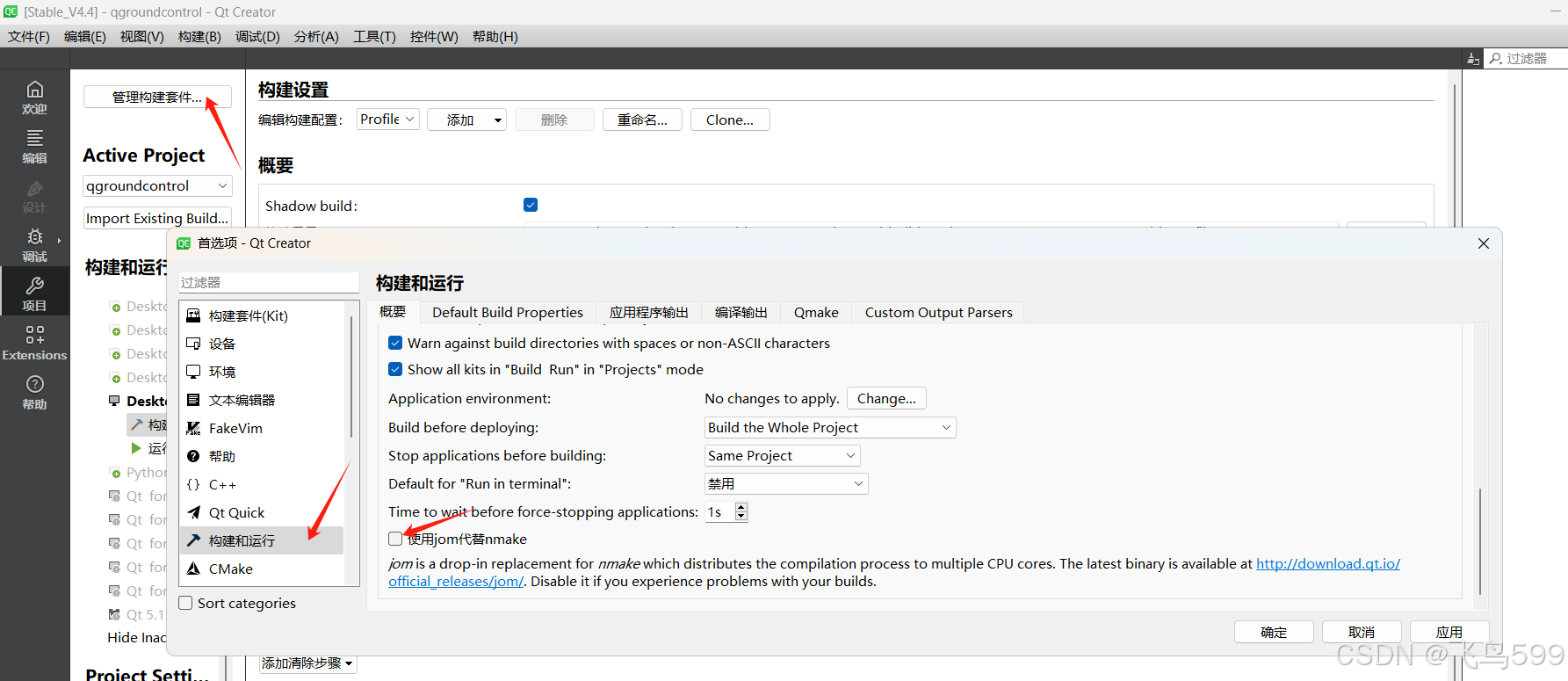
那个使用jom代替nmake取消勾选(必须)
然后如下点击:
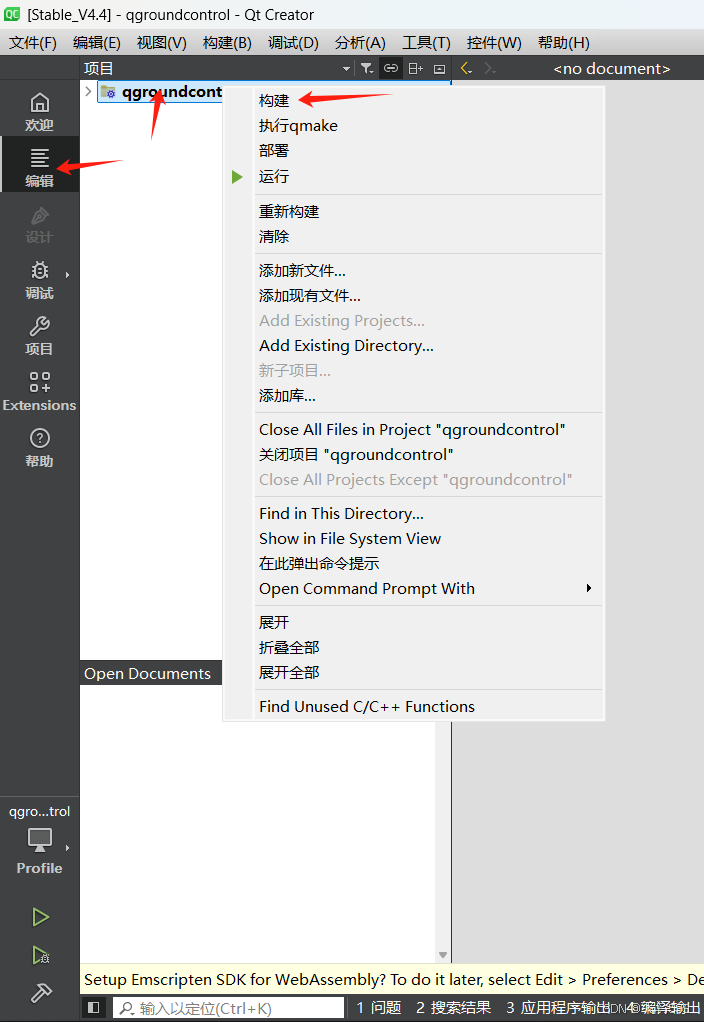
等待构建,期间百分百报错,你会遇到27个警告,两个错误,请参考文章:
https://blog.youkuaiyun.com/feiniaovery233/article/details/143749218?spm=1001.2014.3001.5502
后面几条

















 3085
3085

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









