




FPGA教程系列-Vivado AXI4-Stream Data FIFO核解读测试
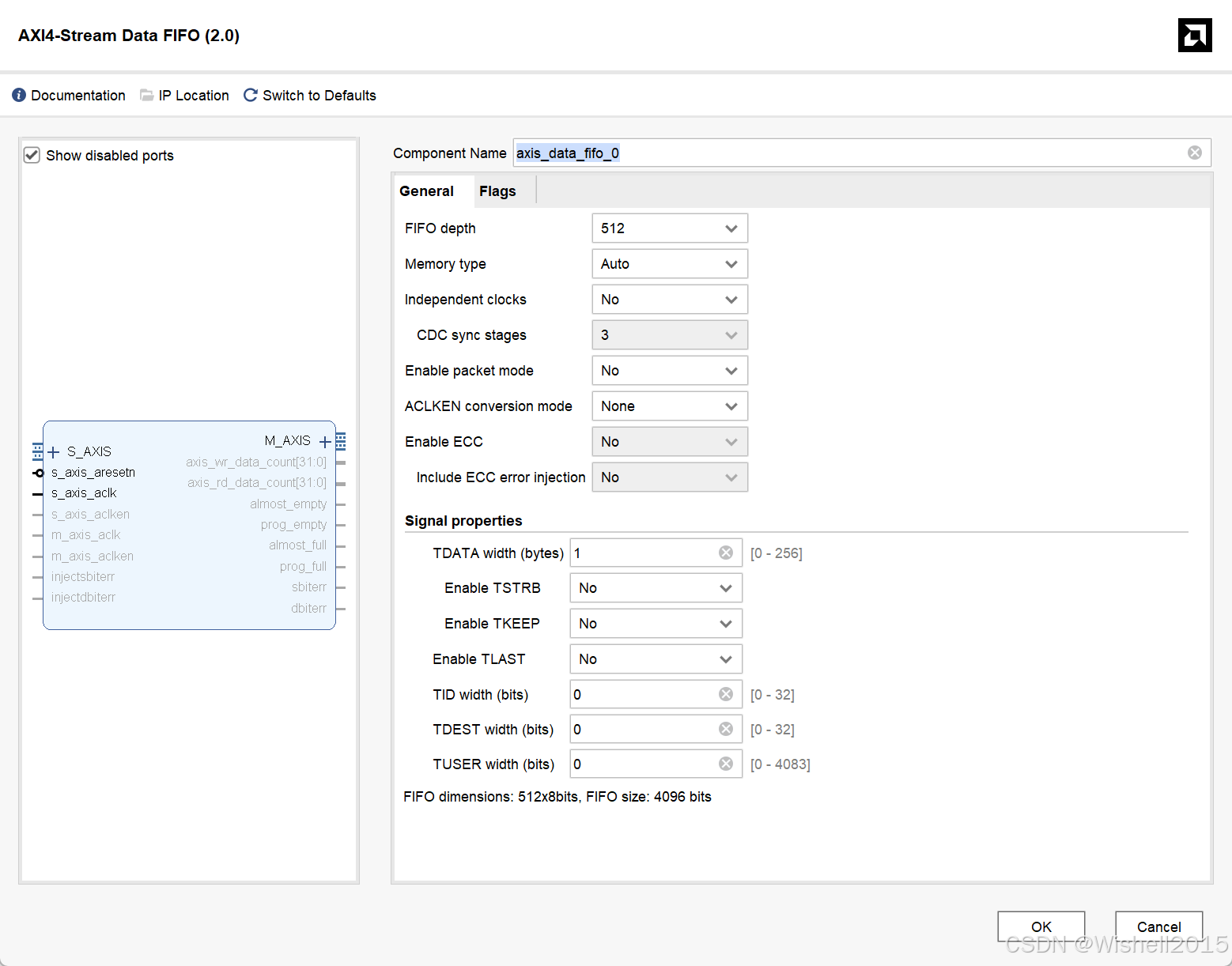
FIFO depth (FIFO 深度): 定义了 FIFO 能存储多少个数据字(Data Words)。
注意:实际占用的存储资源取决于深度乘以数据宽度(TDATA width)。
Memory type (存储器类型): Auto
- 决定用 FPGA 内部的哪种资源来实现 FIFO。
- Auto: 让 Vivado 综合工具根据 FIFO 的大小自动选择(通常小 FIFO 用分布式 RAM/LUTRAM,大 FIFO 用块 RAM/BRAM)。
- Block RAM: 强制使用 BRAM。
- Distributed RAM: 强制使用 LUT 搭建的 RAM。
- UltraRAM: 针对 UltraScale+ 系列的特殊大容量 RAM。
Independent clocks (独立时钟): No
- No (同步 FIFO): 写入侧(Slave)和读取侧(Master)使用同一个时钟信号 (
s_axis_aclk)。这消耗资源较少,延迟较低。 - Yes (异步 FIFO): 启用跨时钟域功能。输入和输出可以使用不同频率的时钟。此时界面左侧的端口图会显示
s_axis_aclk (写时钟) 和m_axis_aclk(读时钟)。
CDC sync stages (跨时钟域同步级数): 3 (灰色不可选)
只有当选择了 “Independent clocks: Yes” 时才有效。它定义了用于同步信号的寄存器级数,通常用于防止亚稳态。
Enable packet mode (启用包模式): No
- No: 普通 FIFO 模式。只要 FIFO 里有数据,Master 端就会尝试输出。
- Yes: FIFO 会等到接收到一个完整的数据包(即收到
TLAST信号)后,才开始向 Master 端输出数据。这用于防止数据包在传输中间断流(Underrun),但会增加延迟。
ACLKEN conversion mode: None,用于控制时钟使能信号的处理方式。通常保持默认 None 即可。
Enable ECC (启用 ECC 校验): No,是否启用错误检查和纠正(Error Correction Code)。启用后会增加逻辑资源,用于检测和修复位翻转错误。
TDATA width (bytes) (数据位宽): 1
- 定义主要数据总线
TDATA 的宽度。设为 1 byte,也就是 8 bits。这意味着每个时钟周期传输 8 位数据。
Enable TSTRB (启用 TSTRB 信号): No,TSTRB (Strobe) 用于指示哪些字节是有效的位置选通信号。对于纯数据流通常不需要。
Enable TKEEP (启用 TKEEP 信号): No,TKEEP (Keep) 用于指示数据流中的哪些字节是有效的(通常用于处理非对齐的数据包尾部)。
Enable TLAST (启用 TLAST 信号): No,TLAST 用于指示一个数据包(Packet)的结束。
设为 No,意味着这个 FIFO 认为数据是无限连续的流,没有“包”的概念。如果需要划分帧或包,必须选 Yes。
TID / TDEST / TUSER width (bits): 0
- 这些是 AXI-Stream 的边带信号(ID、Destination、User data)。
- 设为 0 表示不使用这些信号,它们不会出现在 IP 核的端口上,也不会被 FIFO 缓存。
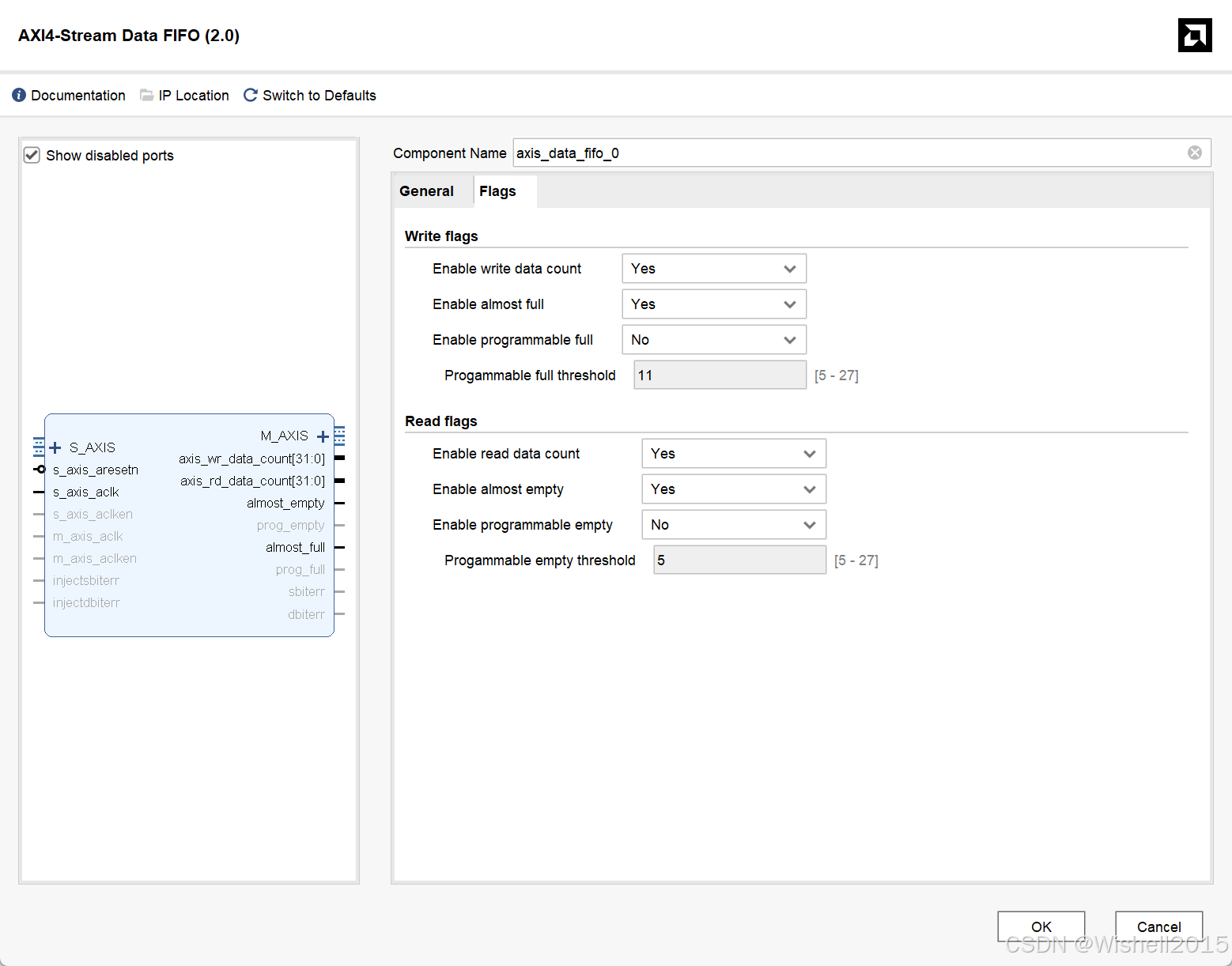
Write flags(写入侧标志位)
Enable write data count (启用写入数据计数): Yes, 勾选后,IP 核会增加一个输出端口 axis_wr_data_count。 这个信号会实时输出 FIFO 中当前存储了多少个数据字(Data Words)。写入侧的逻辑可以读取这个值,精确判断 FIFO 里还有多少空间。
Enable almost full (启用“将满”信号): Yes, 勾选后,IP 核会增加一个输出端口 almost_full。当 FIFO 只剩下一个写入位置时,这个信号就会变高。它是一个紧急警告信号,告诉前级电路“再写一个我就满了”,通常比标准的 TREADY 变低(表示已满)提前一个周期提示。
Enable programmable full (启用可编程满信号): No, 是否启用一个自定义阈值的“满”信号 (prog_full)。
如果选 Yes: 你可以在下方的 Programmable full threshold 框中填入一个数字(例如 400)。当 FIFO 里的数据量达到或超过 400 时,prog_full 信号就会变高。这用于需要比“将满”更早进行流控的场景。
Read flags(读取侧标志位)
Enable read data count (启用读取数据计数): Yes, 勾选后,IP 核会增加一个输出端口 axis_rd_data_count。 实时输出 FIFO 中当前有多少个数据等待被读取。
注意: 如果使用的是独立时钟(异步 FIFO),write data count 和 read data count 分别属于写入时钟域和读取时钟域,数值可能略有延迟差异。如果是同步 FIFO,这两个值通常是一样的。
Enable almost empty (启用“将空”信号): Yes, 勾选后,IP 核会增加一个输出端口 almost_empty。 当 FIFO 只剩下一个数据可读时,这个信号就会变高。提示后级电路数据流即将断档。
Enable programmable empty (启用可编程空信号): No, 是否启用一个自定义阈值的“空”信号 (prog_empty)。
如果选 Yes: 可以在下方的 Programmable empty threshold 填入数字(例如 10)。当 FIFO 数据量少于等于 10 时,该信号变高。
选项与FIFO很类似,可以参考FIFO的使用。
可以直接打开官方的例程进行仿真:
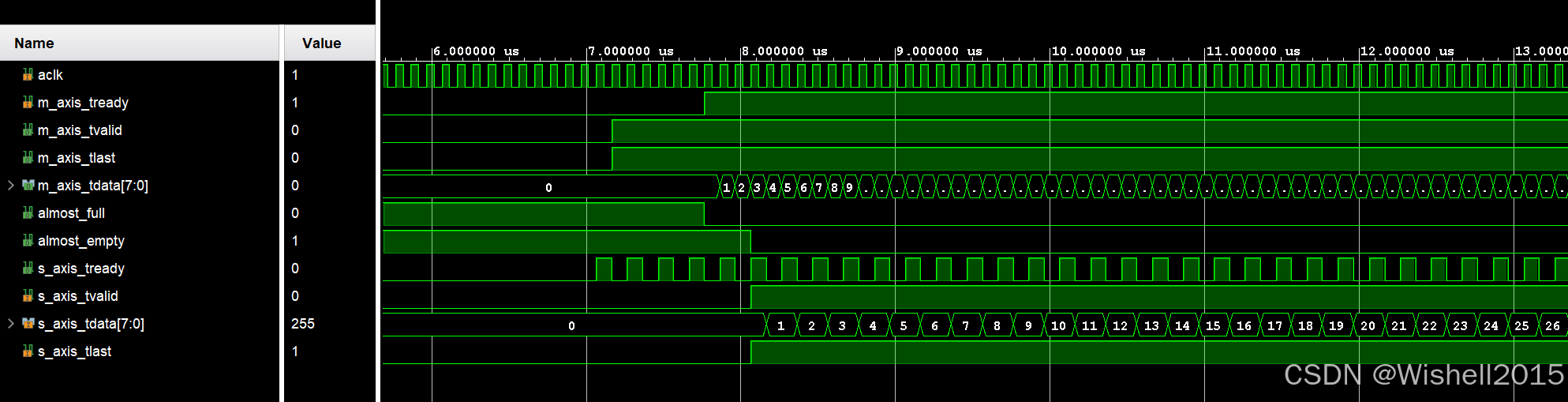
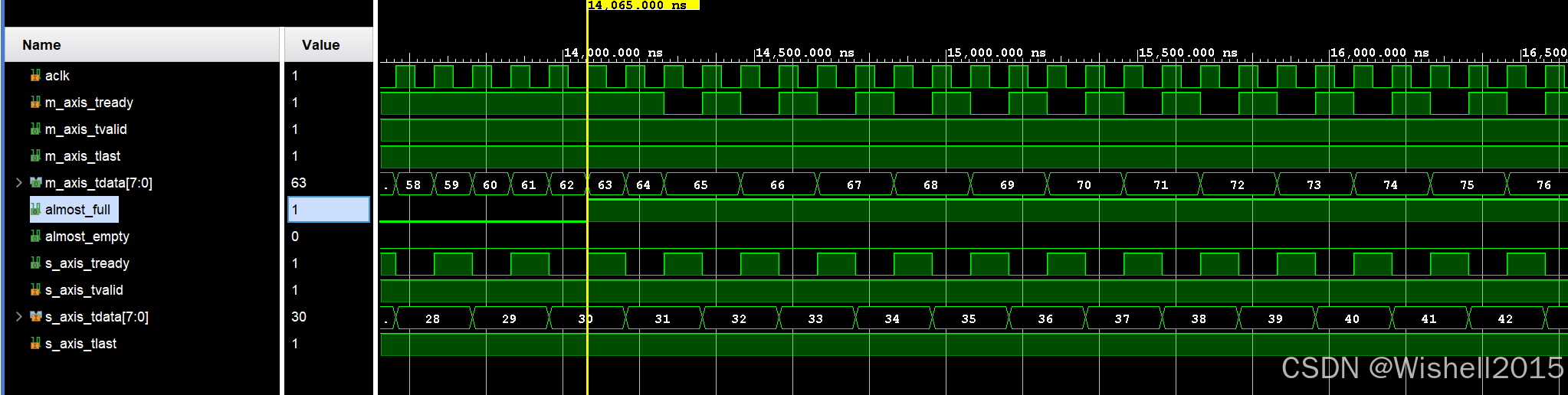
1、写的速度是读的2倍:
这部分主要是因为从的程序:
always @(posedge aclk) begin
if(areset) ...
else begin
s_axis_tready <= ~s_axis_tready; // 核心逻辑:每周期翻转一次
end
end
可以看到,s_axis_tready信号在 0 和 1 之间不断跳变。这意味着接收端一会儿说“我满了”,一会儿说“我可以收”。人为制造总线拥塞(Backpressure)。这强迫上游的 FIFO 必须将数据存入内部 RAM,从而验证 FIFO 的缓存功能和满标志逻辑是否正常工作。
2、tlast 一直为 1 是因为:代码逻辑显式地在复位后将其置 1。
3、快满以后,读跟写的间隔变为一致。
自测
可以直接编写一个testbench:
`timescale 1ns / 1ps
module tb_axis_data_fifo();
//-------------------------------------------------------------------------
// 1. 信号定义
//-------------------------------------------------------------------------
// 时钟与复位
reg clk;
reg resetn;
// Slave 接口 (写入端)
reg s_axis_tvalid;
wire s_axis_tready;
reg [7:0] s_axis_tdata;
reg s_axis_tlast;
// Master 接口 (读取端)
wire m_axis_tvalid;
reg m_axis_tready;
wire [7:0] m_axis_tdata;
wire m_axis_tlast;
// 状态信号
wire [31:0] axis_wr_data_count;
wire [31:0] axis_rd_data_count;
wire almost_empty;
wire almost_full;
//-------------------------------------------------------------------------
// 2. DUT (Device Under Test) 实例化
//-------------------------------------------------------------------------
axis_data_fifo_0 dut (
.s_axis_aresetn (resetn), // input wire s_axis_aresetn
.s_axis_aclk (clk), // input wire s_axis_aclk
// 写端口 (Slave)
.s_axis_tvalid (s_axis_tvalid), // input wire s_axis_tvalid
.s_axis_tready (s_axis_tready), // output wire s_axis_tready
.s_axis_tdata (s_axis_tdata), // input wire [7 : 0] s_axis_tdata
.s_axis_tlast (s_axis_tlast), // input wire s_axis_tlast
// 读端口 (Master)
.m_axis_tvalid (m_axis_tvalid), // output wire m_axis_tvalid
.m_axis_tready (m_axis_tready), // input wire m_axis_tready
.m_axis_tdata (m_axis_tdata), // output wire [7 : 0] m_axis_tdata
.m_axis_tlast (m_axis_tlast), // output wire m_axis_tlast
// 状态信号
.axis_wr_data_count (axis_wr_data_count), // output wire [31 : 0] axis_wr_data_count
.axis_rd_data_count (axis_rd_data_count), // output wire [31 : 0] axis_rd_data_count
.almost_empty (almost_empty), // output wire almost_empty
.almost_full (almost_full) // output wire almost_full
);
//-------------------------------------------------------------------------
// 3. 时钟生成 (100MHz)
//-------------------------------------------------------------------------
initial begin
clk = 0;
forever #5 clk = ~clk; // 周期 10ns
end
//-------------------------------------------------------------------------
// 4. 辅助任务:发送数据包
//-------------------------------------------------------------------------
// 参数:发送的数据个数
task write_packet(input [31:0] length);
integer i;
begin
@(posedge clk); // 同步到时钟沿
wait(resetn == 1);
$display("[Writer] Start writing packet of length %0d at time %0t", length, $time);
for (i = 0; i < length; i = i + 1) begin
s_axis_tvalid <= 1'b1;
s_axis_tdata <= i[7:0]; // 数据内容就是简单的 0, 1, 2...
// 如果是最后一个数据,拉高 tlast
if (i == length - 1)
s_axis_tlast <= 1'b1;
else
s_axis_tlast <= 1'b0;
// 等待握手成功 (tvalid & tready 均为高)
do begin
@(posedge clk);
end while (s_axis_tready == 1'b0); // 如果 FIFO 满,tready 会拉低,这里会阻塞等待
end
// 发送完毕,拉低信号
s_axis_tvalid <= 1'b0;
s_axis_tlast <= 1'b0;
$display("[Writer] Packet writing finished at time %0t", $time);
end
endtask
//-------------------------------------------------------------------------
// 5. 主测试激励 (Stimulus)
//-------------------------------------------------------------------------
initial begin
// 初始化信号
resetn = 0;
s_axis_tvalid = 0;
s_axis_tdata = 0;
s_axis_tlast = 0;
m_axis_tready = 0; // 初始状态下不读取数据,为了测试 Full 信号
// 1. 复位序列
$display("--- Test Start: Reset ---");
#100;
resetn = 1;
#20;
// 2. 写入测试:在不读取的情况下写入数据
// 假设 FIFO 深度较小,或者我们只是为了观察 Wr_count 增加
// 此时 m_axis_tready = 0,数据会堆积在 FIFO 中
$display("--- Test Phase 1: Write only (Fill FIFO) ---");
write_packet(16); // 写入 16 个数据
// 观察一段时间状态
#50;
$display("Status Check: WR Count = %0d, RD Count = %0d, Almost Full = %b",
axis_wr_data_count, axis_rd_data_count, almost_full);
// 3. 读取测试:打开读使能,排出数据
$display("--- Test Phase 2: Enable Read (Drain FIFO) ---");
@(posedge clk);
m_axis_tready = 1; // 允许读取
// 等待数据读完(简单起见,延时等待)
wait(axis_rd_data_count == 0 && m_axis_tvalid == 0);
#100;
// 4. 并发读写测试
$display("--- Test Phase 3: Concurrent Read & Write ---");
m_axis_tready = 1; // 保持读取开启
write_packet(32); // 再次写入 32 个数据
#200;
$display("--- Test Finished ---");
$stop;
end
//-------------------------------------------------------------------------
// 6. 监控模块 (Monitor):打印读出的数据
//-------------------------------------------------------------------------
always @(posedge clk) begin
if (m_axis_tvalid && m_axis_tready) begin
$display("[Reader] Read Data: %h (Last: %b) at time %0t",
m_axis_tdata, m_axis_tlast, $time);
end
end
endmodule
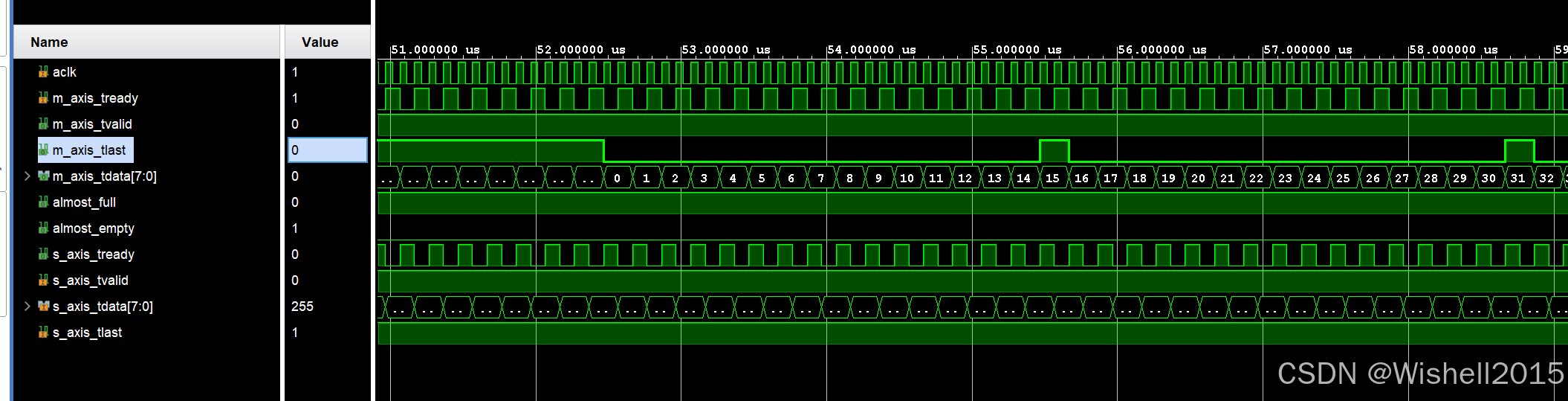
仿真结果:
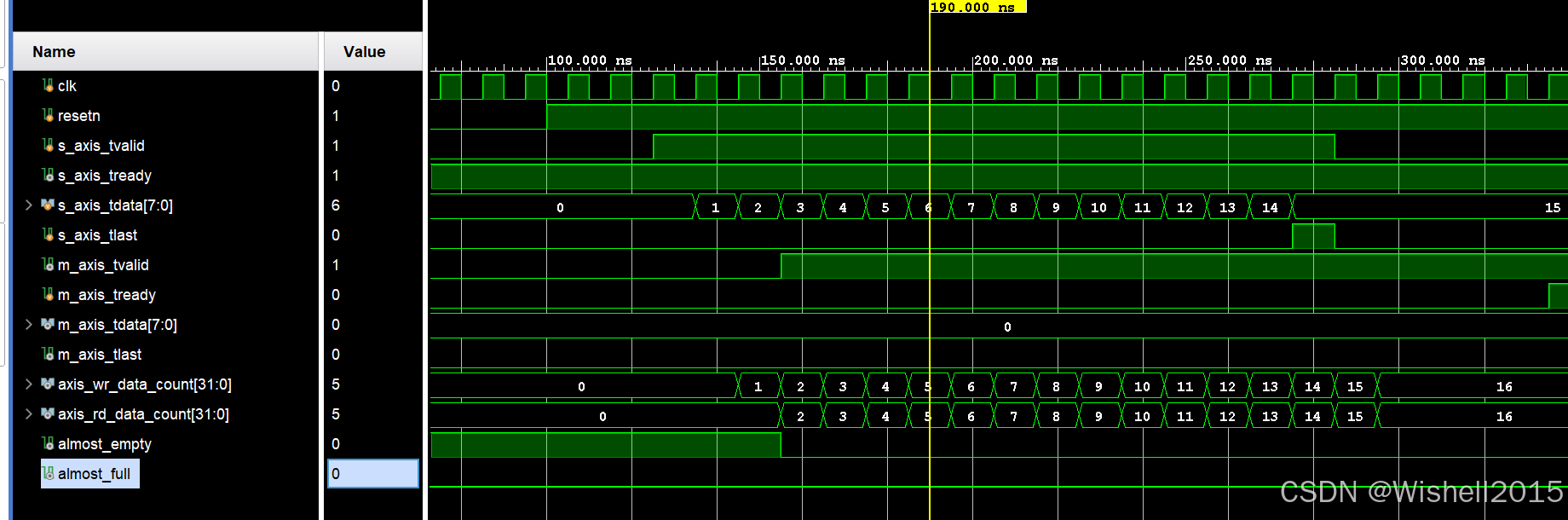
符合预期。其实就是两个AXI接口分别负责读和写,stream相对来说比较简单。

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









