




 本文详细介绍了在Windows环境下安装和使用OMPL库的过程,包括使用vcpkg安装依赖库,解决安装过程中遇到的问题,以及如何在VS2017中构建和调用OMPL库。
本文详细介绍了在Windows环境下安装和使用OMPL库的过程,包括使用vcpkg安装依赖库,解决安装过程中遇到的问题,以及如何在VS2017中构建和调用OMPL库。
说明
OMPL库在Linux下使用较为方便,由于要使用到其核心算法库的部分功能。软件在WIN10平台下使用,故整理总结本文。其中通过官方的方法安装存在一定问题,安装报错,在官网讨论区有所讨论但还未解决。主要是python绑定使用存在一些问题,但其核心c++库依旧可以使用。
准备
- ompl官方源码 本文使用的为ompl 非.app
- vcpkg,微软第三方开源库集成器
- VS2017
- cmake
安装
第一步:安装vcpkg,安装方法
第二步:按照官方建议,利用vcpkg安装第三方库
vcpkg install boost:x64-windows
vcpkg install eigen3:x64-windows
vcpkg install assimp:x64-windows
vcpkg install fcl:x64-windows
vcpkg install pqp:x64-windows
该步骤中,若按照fcl等报错,可能是未安装cmake工具或缺少其他插件。利用VS2017安装相关工具
开始菜打开“Visual Studio Installer
点击“修改”
在“单个组件”中找到“用于CMake和Linux的VisualC++工具”勾选之
修改安装,静候佳音。
第三步:安装完依赖库后,打开ompl目录,利用cmake构建sln方案。按住shift点击右键打开powershell,输入下列代码
mkdir build
cd build
cmake -G"Visual Studio 15 2017 Win64" -DCMAKE_BUILD_TYPE=Release -DCMAKE
_TOOLCHAIN_FILE="D:\vcpkg-master\scripts\buildsystems\vcpkg.cmake" -DOMPL_REGISTRATION=OFF ..
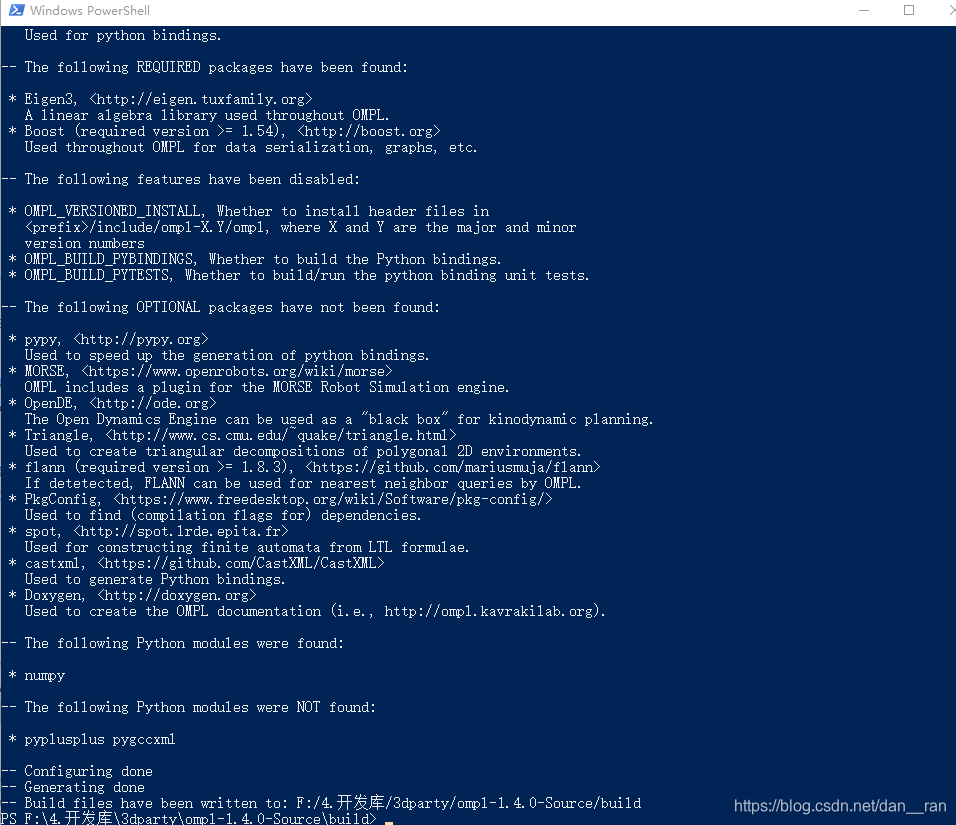
上图即为官方网站上讨论的还未解决的情况,跟python有关,具体不是很清楚。
生成完成后的build文件夹里的内容
第四步:打开ompl.sln
直接打开ompl.sln加载的情况如下
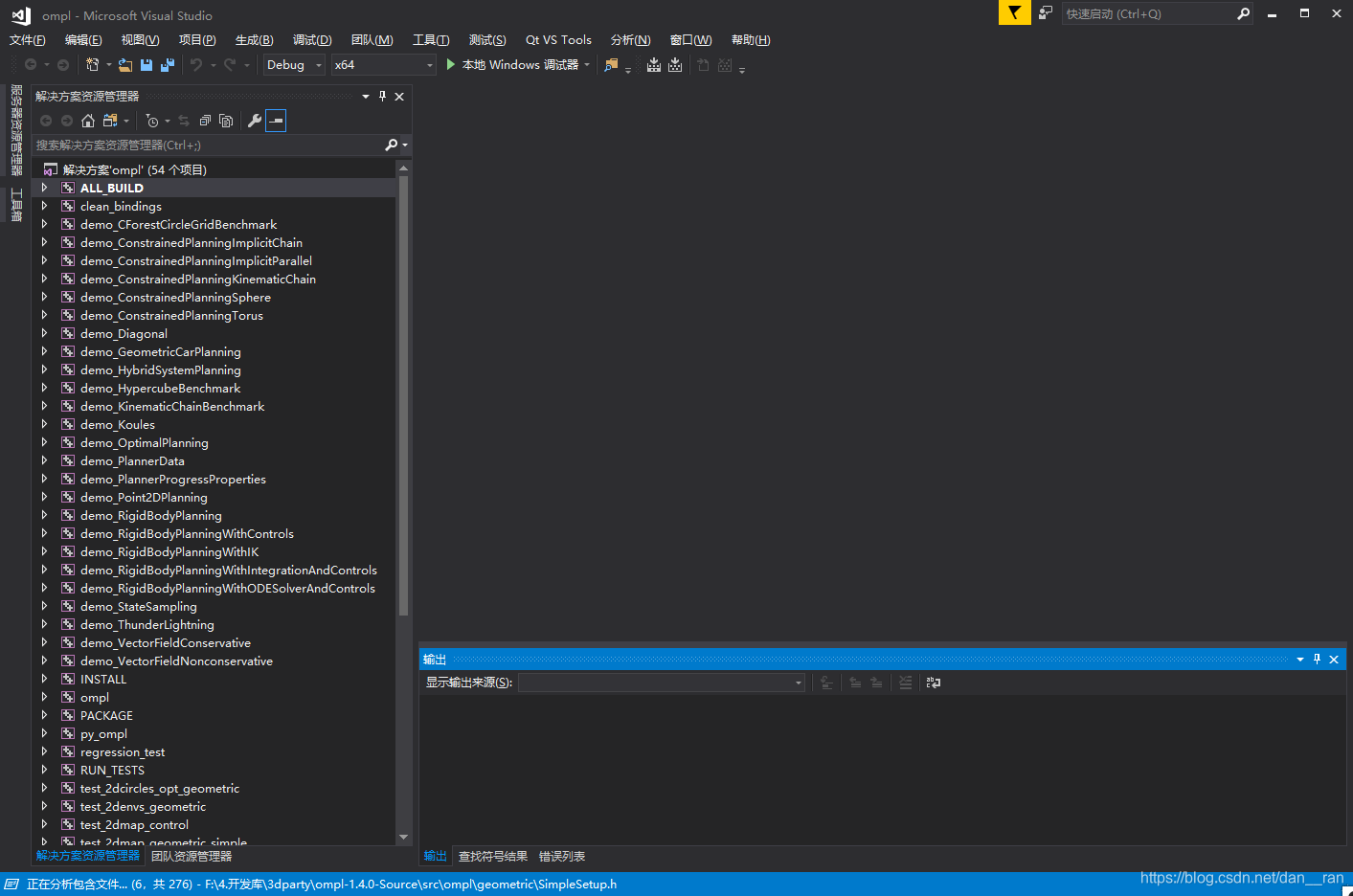
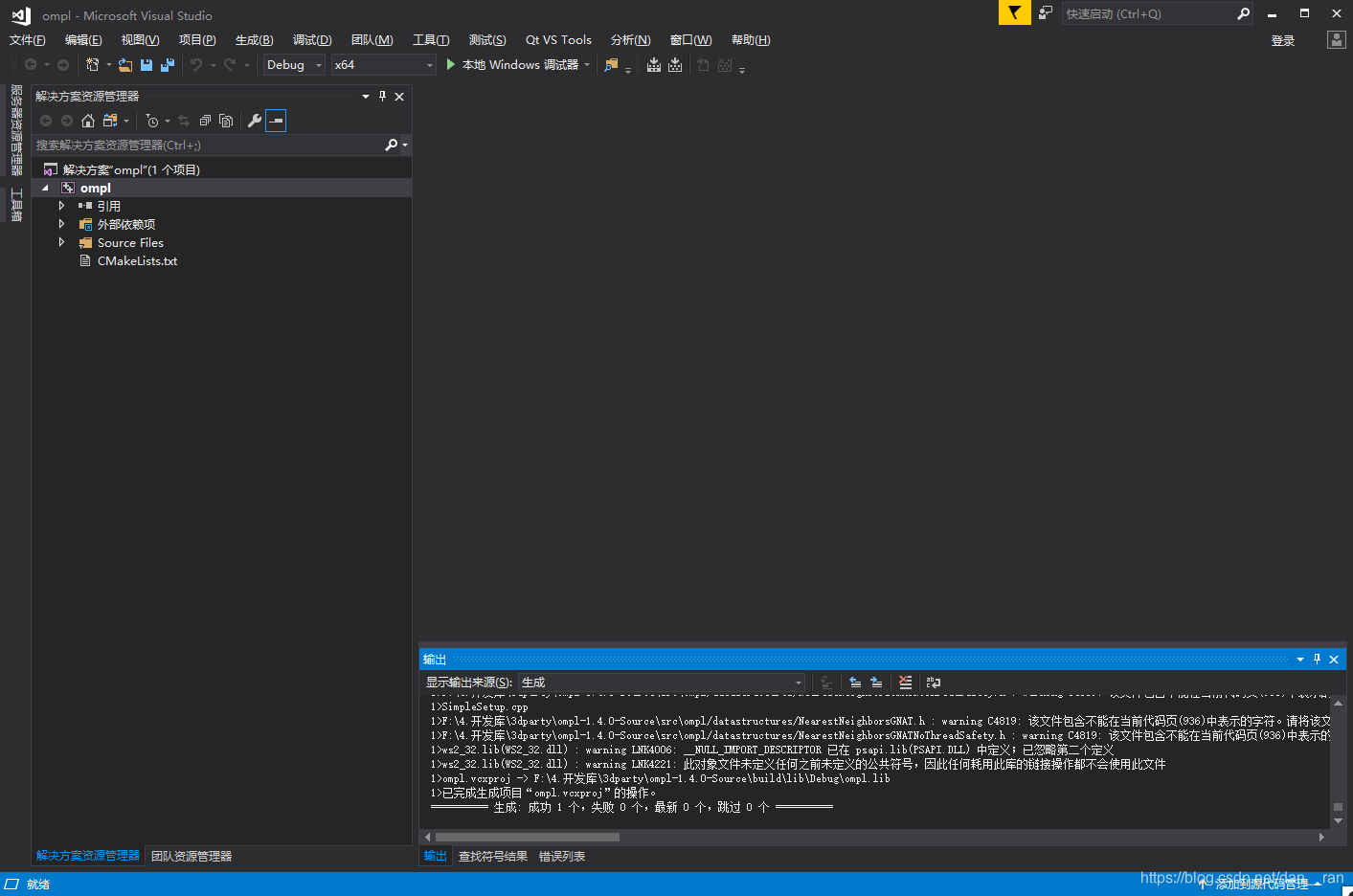
若直接点击生成会报一堆错误,而由于我需要的仅为C++库,故将除ompl外的其他方案移除,然后点击生成。
第五步:自己调用OMPL库
在VS中新建一个空项目,其中需要注意的是一些配置文件需要设置。参数的设置可以参照bulid/demos文件夹的相关解决方案进行配置。
C++语言项里面需要尤其注意。部分用到的boost的dll和lib也自己加入到配置当中去。
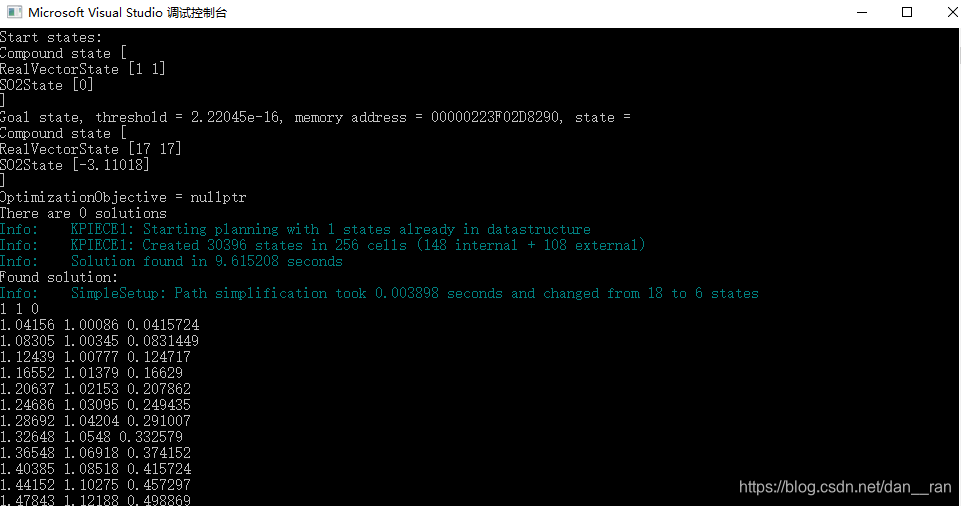
执行示例源码
/*********************************************************************
* Software License Agreement (BSD License)
*
* Copyright (c) 2010, Rice University
* All rights reserved.
*
* Redistribution and use in source and binary forms, with or without
* modification, are permitted provided that the following conditions
* are met:
*
* * Redistributions of source code must retain the above copyright
* notice, this list of conditions and the following disclaimer.
* * Redistributions in binary form must reproduce the above
* copyright notice, this list of conditions and the following
* disclaimer in the documentation and/or other materials provided
* with the distribution.
* * Neither the name of the Rice University nor the names of its
* contributors may be used to endorse or promote products derived
* from this software without specific prior written permission.
*
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
* "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
* LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS
* FOR A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE
* COPYRIGHT OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT,
* INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING,
* BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES;
* LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER
* CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT
* LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN
* ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE
* POSSIBILITY OF SUCH DAMAGE.
*********************************************************************/
/* Author: Mark Moll */
#include <ompl/base/spaces/DubinsStateSpace.h>
#include <ompl/base/spaces/ReedsSheppStateSpace.h>
#include <ompl/base/ScopedState.h>
#include <ompl/geometric/SimpleSetup.h>
#include <boost/program_options.hpp>
namespace ob = ompl::base;
namespace og = ompl::geometric;
namespace po = boost::program_options;
// The easy problem is the standard narrow passage problem: two big open
// spaces connected by a narrow passage. The hard problem is essentially
// one long narrow passage with the robot facing towards the long walls
// in both the start and goal configurations.
bool isStateValidEasy(const ob::SpaceInformation *si, const ob::State *state)
{
const auto *s = state->as<ob::SE2StateSpace::StateType>();
double x = s->getX(), y = s->getY();
return si->satisfiesBounds(s) && (x < 5 || x > 13 || (y > 8.5 && y < 9.5));
}
bool isStateValidHard(const ob::SpaceInformation *si, const ob::State *state)
{
return si->satisfiesBounds(state);
}
void plan(const ob::StateSpacePtr &space, bool easy)
{
ob::ScopedState<> start(space), goal(space);
ob::RealVectorBounds bounds(2);
bounds.setLow(0);
if (easy)
bounds.setHigh(18);
else
{
bounds.high[0] = 6;
bounds.high[1] = .6;
}
space->as<ob::SE2StateSpace>()->setBounds(bounds);
// define a simple setup class
og::SimpleSetup ss(space);
// set state validity checking for this space
const ob::SpaceInformation *si = ss.getSpaceInformation().get();
auto isStateValid = easy ? isStateValidEasy : isStateValidHard;
ss.setStateValidityChecker([isStateValid, si](const ob::State *state) { return isStateValid(si, state); });
// set the start and goal states
if (easy)
{
start[0] = start[1] = 1.;
start[2] = 0.;
goal[0] = goal[1] = 17;
goal[2] = -.99 * boost::math::constants::pi<double>();
}
else
{
start[0] = start[1] = .5;
start[2] = .5 * boost::math::constants::pi<double>();
;
goal[0] = 5.5;
goal[1] = .5;
goal[2] = .5 * boost::math::constants::pi<double>();
}
ss.setStartAndGoalStates(start, goal);
// this call is optional, but we put it in to get more output information
ss.getSpaceInformation()->setStateValidityCheckingResolution(0.005);
ss.setup();
ss.print();
// attempt to solve the problem within 30 seconds of planning time
ob::PlannerStatus solved = ss.solve(30.0);
if (solved)
{
std::vector<double> reals;
std::cout << "Found solution:" << std::endl;
ss.simplifySolution();
og::PathGeometric path = ss.getSolutionPath();
path.interpolate(1000);
path.printAsMatrix(std::cout);
}
else
std::cout << "No solution found" << std::endl;
}
void printTrajectory(const ob::StateSpacePtr &space, const std::vector<double> &pt)
{
if (pt.size() != 3)
throw ompl::Exception("3 arguments required for trajectory option");
const unsigned int num_pts = 50;
ob::ScopedState<> from(space), to(space), s(space);
std::vector<double> reals;
from[0] = from[1] = from[2] = 0.;
to[0] = pt[0];
to[1] = pt[1];
to[2] = pt[2];
std::cout << "distance: " << space->distance(from(), to()) << "\npath:\n";
for (unsigned int i = 0; i <= num_pts; ++i)
{
space->interpolate(from(), to(), (double)i / num_pts, s());
reals = s.reals();
std::cout << "path " << reals[0] << ' ' << reals[1] << ' ' << reals[2] << ' ' << std::endl;
}
}
void printDistanceGrid(const ob::StateSpacePtr &space)
{
// print the distance for (x,y,theta) for all points in a 3D grid in SE(2)
// over [-5,5) x [-5, 5) x [-pi,pi).
//
// The output should be redirected to a file, say, distance.txt. This
// can then be read and plotted in Matlab like so:
// x = reshape(load('distance.txt'),200,200,200);
// for i=1:200,
// contourf(squeeze(x(i,:,:)),30);
// axis equal; axis tight; colorbar; pause;
// end;
const unsigned int num_pts = 200;
ob::ScopedState<> from(space), to(space);
from[0] = from[1] = from[2] = 0.;
for (unsigned int i = 0; i < num_pts; ++i)
for (unsigned int j = 0; j < num_pts; ++j)
for (unsigned int k = 0; k < num_pts; ++k)
{
to[0] = 5. * (2. * (double)i / num_pts - 1.);
to[1] = 5. * (2. * (double)j / num_pts - 1.);
to[2] = boost::math::constants::pi<double>() * (2. * (double)k / num_pts - 1.);
std::cout << space->distance(from(), to()) << '\n';
}
}
int main(int argc, char *argv[])
{
try
{
po::options_description desc("Options");
desc.add_options()
("help", "show help message")
("dubins", "use Dubins state space")
("dubinssym", "use " "symmetrized " "Dubins state " "space")
("reedsshepp", "use Reeds-Shepp state space (default)")
("easyplan", "solve easy planning problem and print " "path")
("hardplan", "solve hard ""planning problem ""and print path")
("trajectory", po::value<std::vector<double>>()->multitoken(), "print trajectory from (0,0,0) to a user-specified x, y, and theta")
("distance", "print distance grid");
argc = 3;
argv[0] = "";
argv[1] = "--dubins";
argv[2] = "--easyplan";
po::variables_map vm;
po::store(po::parse_command_line(argc, argv, desc, po::command_line_style::unix_style ^ po::command_line_style::allow_short), vm);
po::notify(vm);
if ((vm.count("help") != 0u) || argc == 1)
{
std::cout << desc << "\n";
return 1;
}
ob::StateSpacePtr space(std::make_shared<ob::ReedsSheppStateSpace>());
if (vm.count("dubins") != 0u)
space = std::make_shared<ob::DubinsStateSpace>();
if (vm.count("dubinssym") != 0u)
space = std::make_shared<ob::DubinsStateSpace>(1., true);
if (vm.count("easyplan") != 0u)
plan(space, true);
if (vm.count("hardplan") != 0u)
plan(space, false);
if (vm.count("trajectory") != 0u)
printTrajectory(space, vm["trajectory"].as<std::vector<double>>());
if (vm.count("distance") != 0u)
printDistanceGrid(space);
}
catch (std::exception &e)
{
std::cerr << "error: " << e.what() << "\n";
return 1;
}
catch (...)
{
std::cerr << "Exception of unknown type!\n";
}
return 0;
}
结果
官方编译好的库: https://download.youkuaiyun.com/download/dan__ran/10781563
个人编译的库,包括debug和release版本: https://download.youkuaiyun.com/download/dan__ran/10781819

















 741
741

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









