




 本文详细介绍了如何在ROS环境中搭建工作空间并创建功能包的过程。包括创建catkin_ws工作空间、编译工作空间、设置环境变量以及通过catkin_create_pkg命令创建功能包等步骤。
本文详细介绍了如何在ROS环境中搭建工作空间并创建功能包的过程。包括创建catkin_ws工作空间、编译工作空间、设置环境变量以及通过catkin_create_pkg命令创建功能包等步骤。
一、创建工作空间catkin_ws
1.在主目录下创建catkin_ws文件夹,catkin_ws目录下包含src文件夹
mkdir -p ~/catkin_ws/src
2.进入src目录
cd ~/catkin_ws/src
3.初始化文件夹,此命令会在src目录下生成一个CMakeLists.txt文件,指明当前目录为ROS的工作空间
catkin_init_workspace
二、编译工作空间catkin_make
1.切换到catkin_ws目录下
cd ~/catkin_ws/
2.执行 catkin_make命令,在执行完该命令后会生成build 和 devel两个目录
catkin_make
三 、设置环境变量
1.把工作空间的环境变量设置到bash中
echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc
2. 让上面的配置在当前的终端生效
source ~/.bashrc
3.可通过下面命令查看环境变量
echo $ROS_PACKAGE_PATH
终端会输出
/home/ling/catkin_ws/src:/opt/ros/melodic/share
第一个是我们刚才创建的catkin_ws工作空间的,第二个是ros系统的
四、创建功能包catkin_create_pkg
1.切换到src目录
cd ~/catkin_ws/src/
2.创建功能包
格式:
catkin_create_pkg package_name depend1 depend2 depend3 depend...
package_name代表功能包名称,depend1 depend2 depend3代表依赖项
例:
catkin_create_pkg test std_msgs roscpp rospy
test:功能包名
std_msgs:包含常见消息类型
roscpp:使用C++实现ROS各种功能
rospy:使用python实现ROS各种功能
五、编译功能包
1.切换到catkin_ws目录
cd ~/catkin_ws
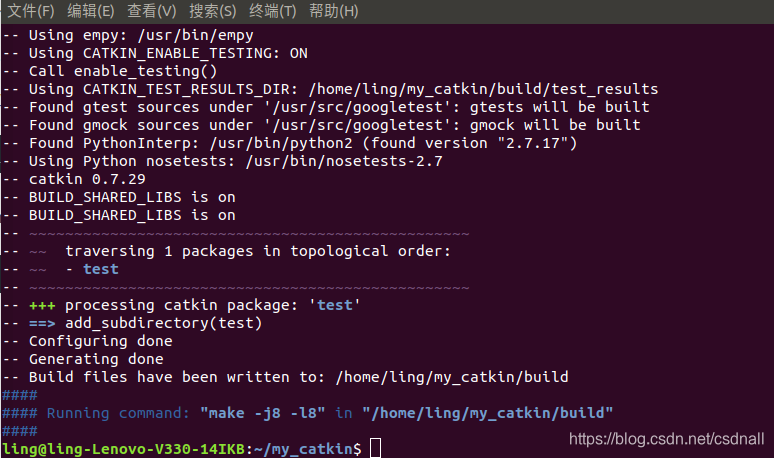
2.执行 catkin_make命令
catkin_make
出现如下界面说明编译成功

















 6064
6064

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









