







 本文介绍了如何使用神经网络输出图片上的特征点坐标进行目标定位,包括人脸识别和人体姿态检测等应用。通过输出特定特征点的位置,可以实现对人脸表情、人物动作姿态的识别。
本文介绍了如何使用神经网络输出图片上的特征点坐标进行目标定位,包括人脸识别和人体姿态检测等应用。通过输出特定特征点的位置,可以实现对人脸表情、人物动作姿态的识别。
来源:Coursera吴恩达深度学习课程
目标定位(Object localization)中介绍了其中一种思路,这里介绍另一种思路。神经网络也可以通过输出图片上特征点(landmark)的(x,y)坐标来实现对目标特征的识别,下面看几个例子。
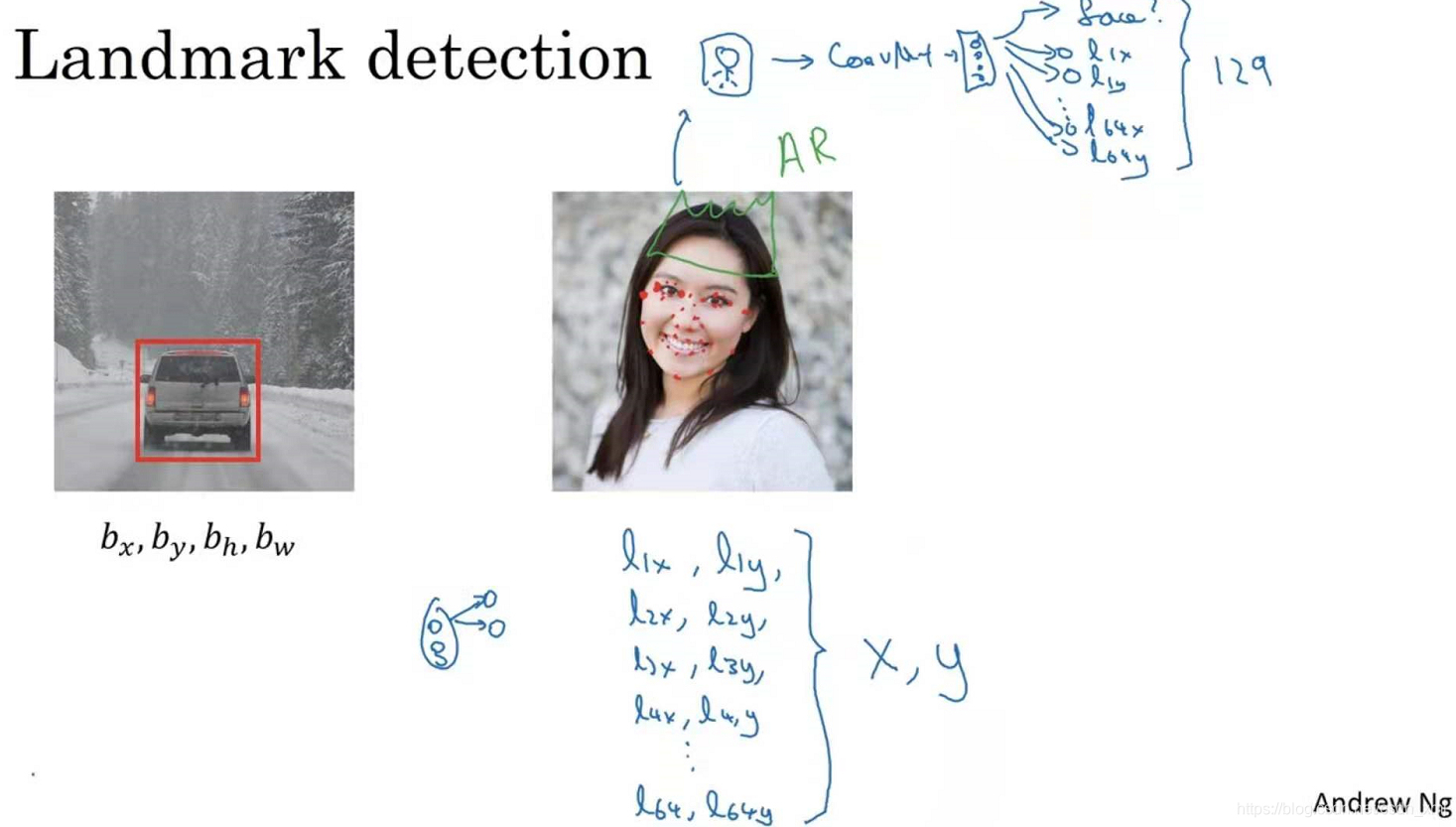
假设你正在构建一个人脸识别应用(face recognition application),你希望算法可以给出眼角的具体位置。眼角坐标为(x,y),让神经网络的最后一层多输出两个数字l_x和l_y,最为眼角的坐标值。如果你想知道两只眼睛的四个眼角的具体位置,那么依次用四个特征点来表示从左到右的四个眼角,例如第一个特征点(l_1x,l_1y),第二个特征点(l_2x,l_2y)等。
同样你也可以根据嘴部的关键点输出值来确定嘴的形状,也可以提取鼻子周围得到关键特征点。假设脸部有64个特征点(landmarks),有些点甚至可以定义脸部轮廓(define the edge of the face)或下颌轮廓(define the jawline)。选定特征点个数,并生成包含这些特征点的标签训练集(label training set),然后利用神经网络输出脸部关键特征点的位置。
具体做法是,准备一个卷积网络和一些特征集,将人脸图片输入卷积网络,输出1或0,1表示有人脸,0表示没有人脸,然后输出(l_1x,l_1y)......直到(l_64x,l_64y)。这里一共有129(1+2*64=129)个输出单元,由此实现对图片的人脸检测和定位。这只是一个识别脸部表情的基本构造模块(basic building block),如果你玩过Snapchat或其它娱乐类应用(other entertainment),你应该对AR(增强现实Augmented Reality)过滤器多少有些了解,Snapchat过滤器实现了在脸上画皇冠和其他一些特殊效果。
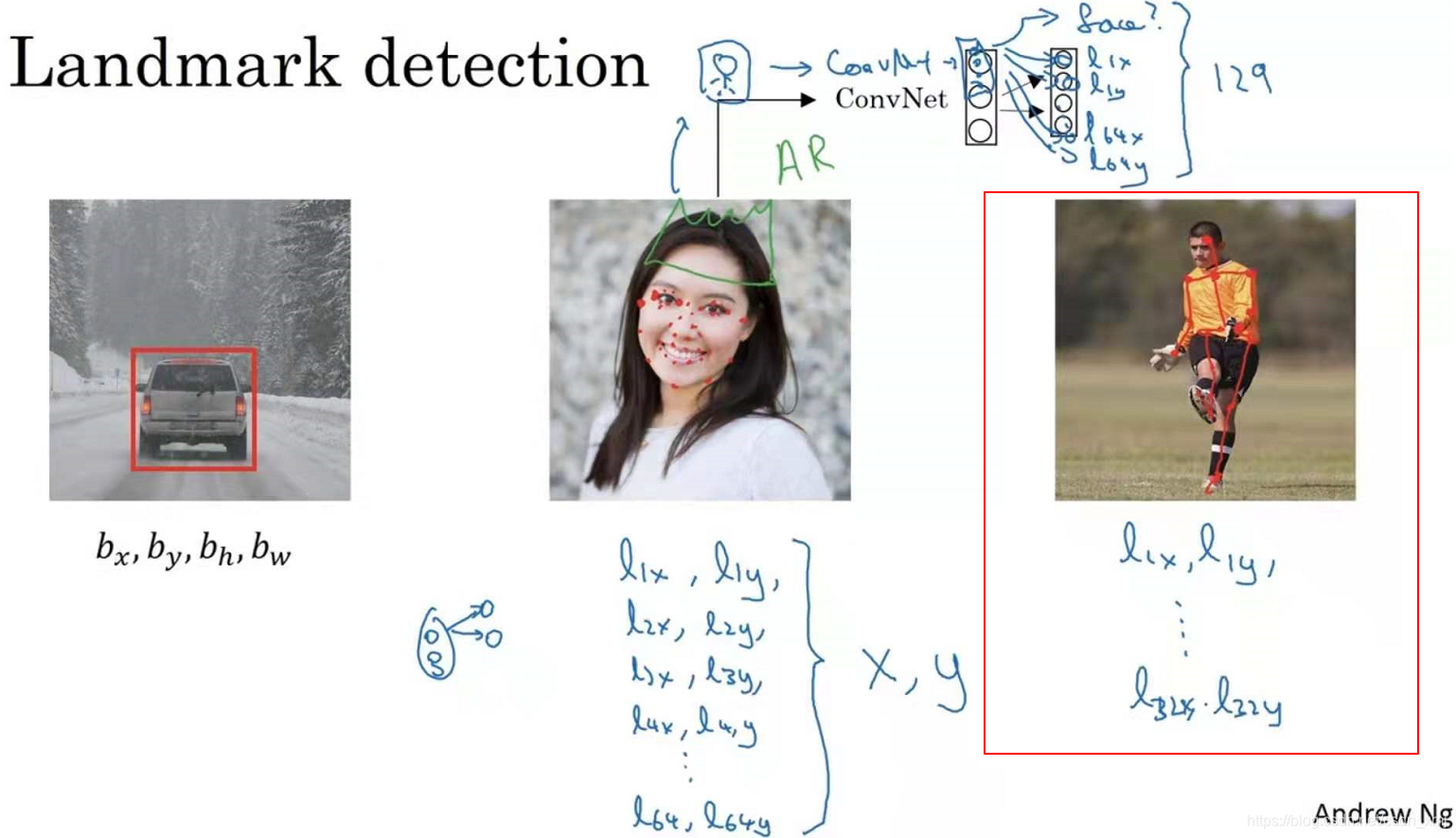
再看一个例子,上图的第三张图,如果你对人体姿态检测(people post-detection)感兴趣,也可以定义一些关键特征点(key positions),如胸部的中点(the midpoint of the chest),左肩(the left shoulder),左肘(left elbow),腰(the wrist)等,从胸部中心点(l_1x,l_1y)一直向下,一直到(l_32x,l_32y)。然后通过神经网络标注人物姿态的关键特征点,再输出这些标注过的特征点,就相当于输出了人物的姿态动作。一旦了解如何用二维坐标系(two coordinates)定义人物姿态,操作起来就相当简单了。要明确一点,特征点的特性(identity)在所有图片中必须保持一致,就好比,特征点1始终是右眼的外眼角,特征点2是右眼的内眼角,特征点3是左眼内眼角,特征点4是左眼外眼角等等。同样可以利用特征点实现其他有趣的效果,比如判断人物的动作姿态(estimate the pose of a person),识别图片中的人物表情(recognize someone’s emotion from a picture)等等。
以上就是特征点检测(landmark detection)的内容,熟悉这些构造模块有利于构建目标检测算法。
说明:记录学习笔记,如果错误欢迎指正!转载请联系我。


















 1583
1583

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









