



 本文深入探讨了A-k-Rounding算法的原理与实现,详细分析了如何通过计算最大公约数来找到满足条件的最小值,提供了一段简洁高效的C++代码实现。
本文深入探讨了A-k-Rounding算法的原理与实现,详细分析了如何通过计算最大公约数来找到满足条件的最小值,提供了一段简洁高效的C++代码实现。
A — k-rounding
原题链接:https://vjudge.net/problem/1077397/origin
题目大意:
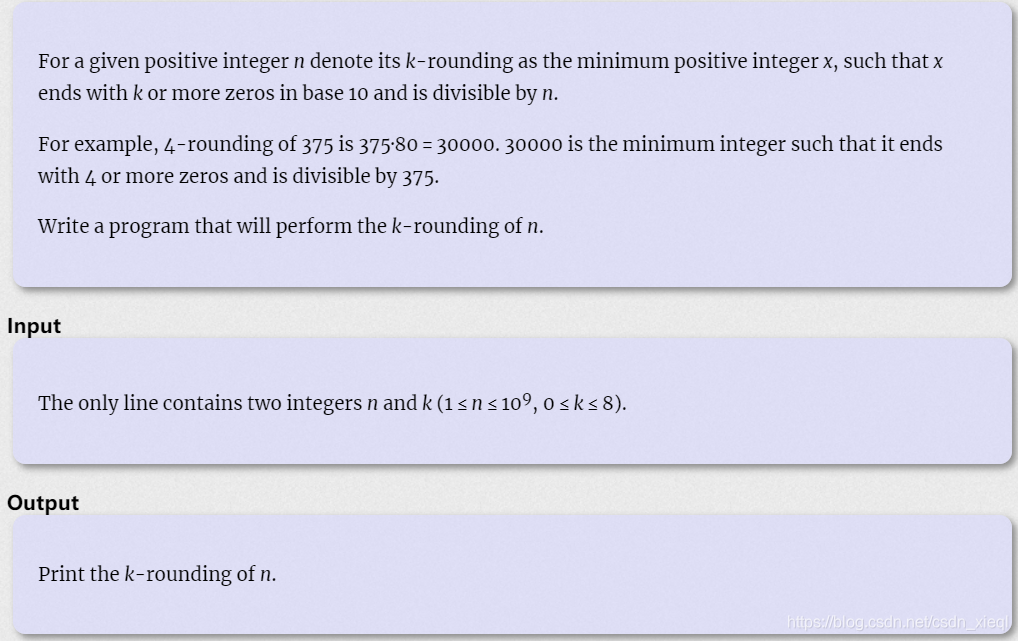
题目分析:
首先,n*10k 肯定是满足的,但是它不一定是最小的。由于10k == 2k*5k,n==m*2p*5q,所以答案就是:m*2max(k,p)*5max(k,q) ==n*10k/gcd(n,10k)。
代码实现:
#include <iostream>
#include <cstdio>
using namespace std;
long long gcd(long long x, long long y)//最大公约数
{
if(y == 0) return x;
else return gcd(y,x%y);
}
int main()
{
long long n;
int k, e;
int i;
cin >> n >> k;
for(i=0, e=1; i<k; i++) e *= 10;
cout << n * e / gcd(n,e) << endl;
return 0;
}

















 171
171

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









