




 本文详细介绍了一种基于PD控制的二阶系统控制方法,通过理论计算确定控制器参数,并利用Runge-Kutta方法进行数值求解,展示了系统响应及控制器效果。
本文详细介绍了一种基于PD控制的二阶系统控制方法,通过理论计算确定控制器参数,并利用Runge-Kutta方法进行数值求解,展示了系统响应及控制器效果。
在上篇文章的基础上,加入PID控制(实际只使用了PD控制)
上篇文章请看:https://blog.youkuaiyun.com/congguitar/article/details/106801306
还是这个二阶系统,选取系统参数:a1=2,a2=2
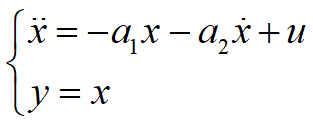
1理论计算
设r为期望值,则我们设计PD控制器为:

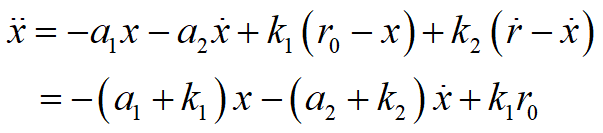
将控制器代入到系统方程中得到闭环系统为

我们来考察系统的节约响应,即令r=1,则其导数为0
进一步得到系统闭环方程:
对应的传递函数为:
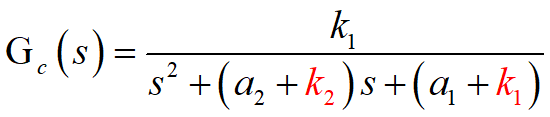
我们通过极点配置的方法确定k1和k2
假设我系统的极点为
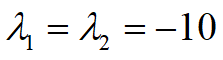
则通过计算得到:k1=98和k2=18,得到控制器参数。
2 程序部分
import math
import numpy as np
import matplotlib.pyplot as plt
def runge_kutta(y,h,f):
k1 = h*f(t,x1,x2)
k2 = h*f(t+0.5*k1,x1+0.5*k1,x2+0.5*k1)
k3 = h*f(t+0.5*k2,x1+0.5*k2,x2+0.5*k2)
k4 = h*f(t+k3,x1+k3,x2+k3)
return y+(k1+2*k2+2*k3+k4)/6.
def func_x1(t,x1,x2):
return x2
def func_x2(t,x1,x2):
return -2*x1-2*x2+u
def control(e,de):
return kp*e+kd*de
if __name__=='__main__':
#initial
#Ts
dt = .001
#state
t = 0;u = 0;r = 1;
x1 = 0;x2 = 0;
e = r-x1;e_ = e;
rs,x1s,x2s,ds,us,ts=[],[],[],[],[],[]
#control
kp=100
kd=20
#Run
while t <= 10:
#r =math.cos(t)
x1=runge_kutta(x1,dt,func_x1)
x2=runge_kutta(x2,dt,func_x2)
e =r-x1;
de=(e-e_)/dt
e_=e
u =control(e,de)
t+= dt
rs.append(r)
x1s.append(x1)
x2s.append(x2)
us.append(u)
ts.append(t)
#Plot
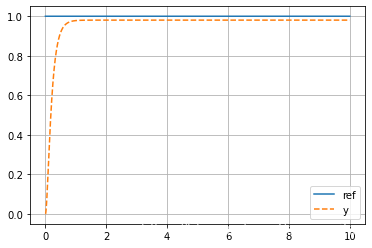
plt.plot(ts, rs, label='ref')
plt.plot(ts, x1s, label='y', linestyle='--')
plt.legend();plt.grid();plt.show()
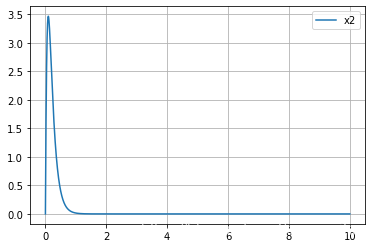
plt.plot(ts, x2s, label='x2')
plt.legend();plt.grid();plt.show()
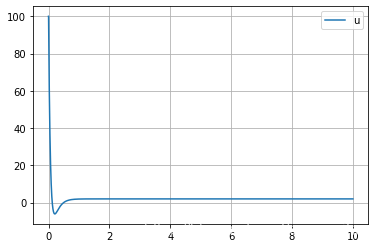
plt.plot(ts, us, label='u')
plt.legend();plt.grid();plt.show()3结果部分
4说明
1)我是在手机上用termux,然后jupyter来编写的。还是挺好玩的
2)然后就成功了!
(版权所有,转载请注明)



















 2656
2656

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









