






 超级会员免费看
超级会员免费看
1.融合动态窗口法和改进蚁群算法的路径规划
2.支持根据自己的需要更改栅格地图
3.支持3个不同智能体的路径规划(无人机,无人船,无人车,机器人等)
4.可以根据自己需要更改障碍物位置
5.支持移动障碍物避障
6.支持各个智能体选取不同的起点和终点
如下图所示避开静止障碍物
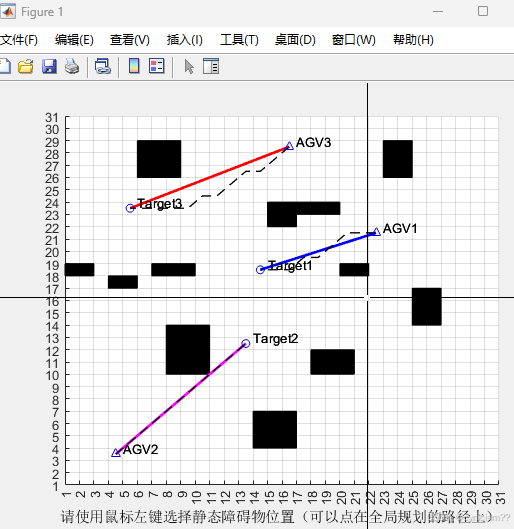
增加移动障碍物,利用dwa算法进行动态实时避障,最终结果如下图(视频正在上传)
融合动态窗口法和改进蚁群算法的多智能体路径规划算法

1.融合动态窗口法和改进蚁群算法的路径规划
2.支持根据自己的需要更改栅格地图
3.支持3个不同智能体的路径规划(无人机,无人船,无人车,机器人等)
4.可以根据自己需要更改障碍物位置
5.支持移动障碍物避障
6.支持各个智能体选取不同的起点和终点
如下图所示避开静止障碍物
增加移动障碍物,利用dwa算法进行动态实时避障,最终结果如下图(视频正在上传)
融合动态窗口法和改进蚁群算法的多智能体路径规划算法

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





 订阅专栏 解锁全文
订阅专栏 解锁全文


















 2486
2486





