




 本文详细介绍了如何在Ubuntu22.04上安装Mujoco210和mujoco-py。首先,从Github下载并安装Mujoco210,包括创建文件夹、添加环境变量和测试运行。接着,通过Anaconda创建Python环境,安装mujoco-py,并解决可能遇到的cython版本问题。最后,配置VS Code和PyCharm的环境变量,确保mujoco-py能成功运行。
本文详细介绍了如何在Ubuntu22.04上安装Mujoco210和mujoco-py。首先,从Github下载并安装Mujoco210,包括创建文件夹、添加环境变量和测试运行。接着,通过Anaconda创建Python环境,安装mujoco-py,并解决可能遇到的cython版本问题。最后,配置VS Code和PyCharm的环境变量,确保mujoco-py能成功运行。
Mujoco 和 mujoco-py 的关系:Mujoco 是一个物理引擎,主要应用于强化学习和最优化控制领域。mujoco-py 是 Mujoco 编程的 Python 接口,由 OpenAI Gym 开发,可以使用 mujoco_py 方便地调用 Mujoco 的API。
Mujoco官网: https://mujoco.org/
1.安装 Mujoco210
1. 从 Github下载 Mujoco https://github.com/openai/mujoco-py
2. 创建文件夹并拷贝
mkdir ~/.mujoco
tar -zxvf mujoco210-linux-x86_64.tar.gz -C ~/.mujoco
3. 添加环境变量
sudo gedit ~/.bashrc
添加:
export LD_LIBRARY_PATH=~/.mujoco/mujoco210/bin
然后退出
source ~/.bashrc
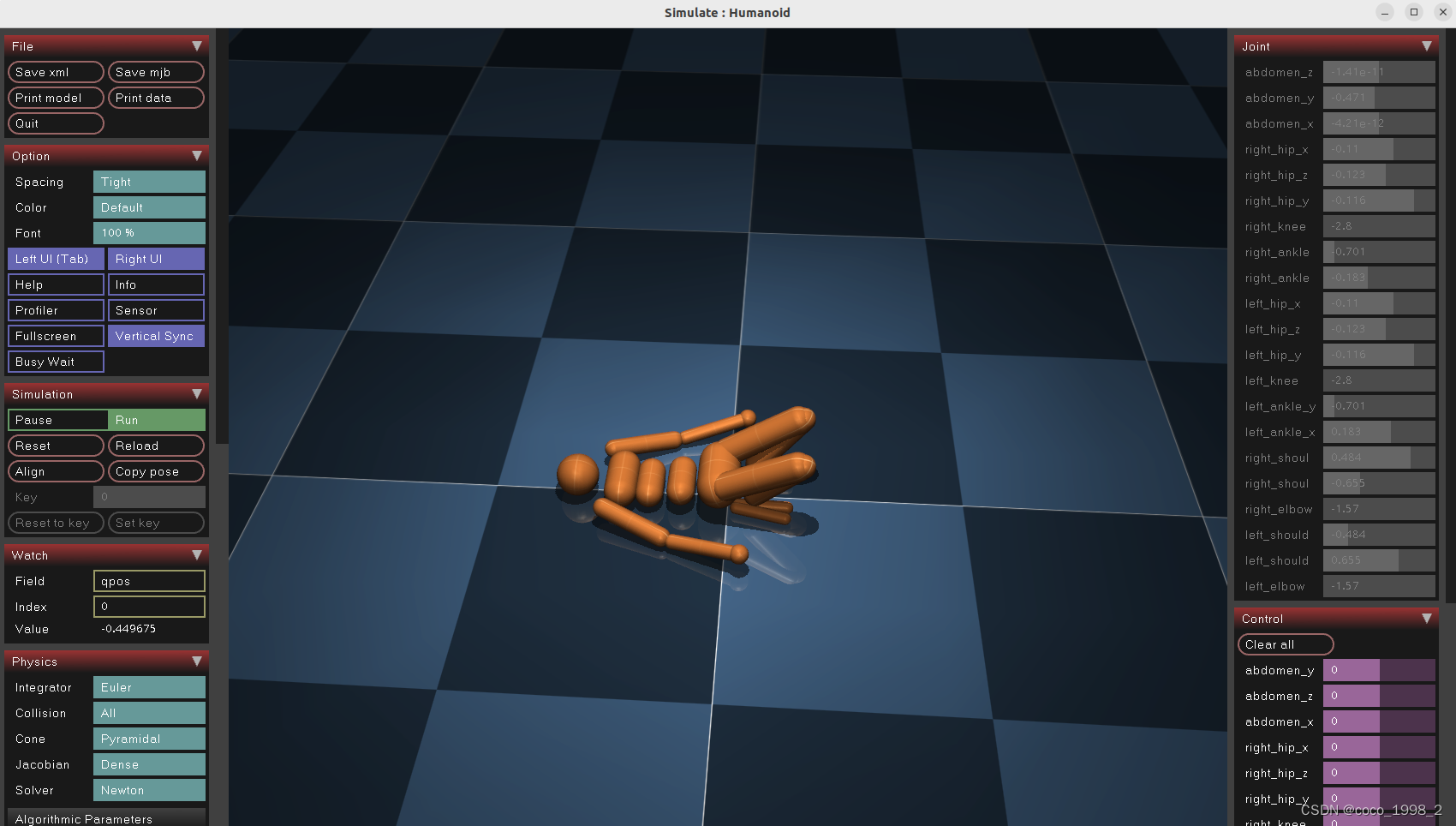
4. 测试 Mujoco
cd ~/.mujoco/mujoco210/bin
./simulate ../model/humanoid.xml
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 6284
6284

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









